相机标定 - 坐标系变换
1. 预备知识
1.1 坐标系
- 世界坐标系:\(X_w\), \(Y_w\), \(Z_w\)
- 摄像机坐标系:\(X_c\), \(Y_c\), \(Z_c\)
- 图像坐标系:\(x\), \(y\)
- 像素坐标系:\(u\), \(v\)
1.2 参数
1.2.1 相机的内部参数矩阵:
\[K=
\begin{bmatrix}
f_x & s & u_0 \\
0 & f_y & v_0 \\
0 & 0 & 1
\end{bmatrix}
=
\begin{bmatrix}
\frac{f}{dx} & s & u_0 \\
0 & \frac{f}{dy} & v_0 \\
0 & 0 & 1
\end{bmatrix}
\]
其中:
\(f_x, f_y\) 分别为摄像机X轴和Y轴上的像素单位焦距,\(f\) 为摄像机的物理焦距,\(dx, dy\) 为像元尺寸(即每个像素对应的物理尺寸)
\(u_0, v_0\) 为主点偏移,表示图像的像素中心
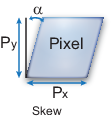
\(s\) 为图像轴不垂直时的倾斜系数,理想情况下是0。\(s=f_x\tan\alpha\)
像素倾斜的定义如下:
1.2.2 畸变系数:
\(k_1\)、\(k_2\)、\(k_3\):径向畸变系数
\(p_1\)、\(p_2\):切向畸变系数
OpenCV 中的畸变系数矩阵:\(\begin{bmatrix}k_1 & k_2 & p_1 & p_2 & k_3\end{bmatrix}\)
1.2.3 相机的外部参数矩阵:
\[\begin{bmatrix}
R_{3*3} & t_{3*1} \\
0 & 1 \\
\end{bmatrix}
=
\begin{bmatrix}
I & t_{3*1} \\
0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
R_{3*3} & 0 \\
0 & 1 \\
\end{bmatrix}
=
\begin{bmatrix}
1 & 0 & 0 & t_1 \\
0 & 1 & 0 & t_2 \\
0 & 0 & 1 & t_3 \\
0 & 0 & 0 & 1
\end{bmatrix}
×
\begin{bmatrix}
r_{11} & r_{12} & r_{13} & 0 \\
r_{21} & r_{22} & r_{23} & 0 \\
r_{31} & r_{32} & r_{33} & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
\]
其中:
\(R_{3*3}\):旋转矩阵,描述世界坐标系相对于摄像机坐标系的方向
\(T_{3*1}\):平移矩阵,描述了在摄像机坐标系下,空间原点的位置
2. 变换
2.1 图像坐标系\((x, y)\)至像素坐标系\((u,v)\)
两坐标轴正交:
\[\left\{
\begin{aligned}
u & = \frac{x}{dx} + u_0 \\
v & = \frac{y}{dy} + v_0
\end{aligned}
\right.
\]
一般情况:
\[\left\{
\begin{aligned}
u & = u_0 + \frac{x_d}{dx} - \frac{y_d \cot{\theta}}{d_x} \\
v & = v_0 + \frac{y_d}{dy \sin{\theta}}
\end{aligned}
\right.
\]
齐次坐标形式:
\[\begin{bmatrix}
u \\
v \\
1
\end{bmatrix}
=
\begin{bmatrix}
f_u & -f_u\cot{\theta} & u_0 \\
0 & f_v/\sin{\theta} & v_0 \\
0 & 0 & 1
\end{bmatrix}
\begin{bmatrix}
x_d \\
y_d \\
1
\end{bmatrix}
\]
其中:
\(f_u = \frac{1}{d_x}\), \(f_v=\frac{1}{d_y}\)
2.2 相机坐标系\((X_c, Y_c, Z_c)\)至图像坐标系\((x, y)\)
\[Z_c
\begin{bmatrix}
x \\
y \\
1
\end{bmatrix}
=
\begin{bmatrix}
f & 0 & 0 & 0 \\
0 & f & 0 & 0 \\
0 & 0 & 1 & 0
\end{bmatrix}
\begin{bmatrix}
X_c \\
Y_c \\
Z_c \\
1
\end{bmatrix}
\]
2.3 世界坐标系\((X_w, Y_w, Z_w)\)至相机坐标系\((X_c, Y_c, Z_c)\)
\[\begin{bmatrix}
X_c \\
Y_c \\
Z_c \\
1
\end{bmatrix}
=
\begin{bmatrix}
R_{3*3} & T_{3*1} \\
O & 1
\end{bmatrix}
\begin{bmatrix}
X_w \\
Y_w \\
Z_w \\
1
\end{bmatrix}
\]
2.4 从世界坐标系至像素坐标系
\[Z_c
\begin{bmatrix}
u \\
v \\
1
\end{bmatrix}
=
K
\begin{bmatrix}
R & T \\
0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
X_w \\
Y_w \\
Z_w \\
1
\end{bmatrix}
\]
3. 畸变系数
径向畸变(Radial Distortion)
径向畸变有两种,分别是枕型畸变(Pincushion)和桶型畸变(Barrel)

径向畸变系数:
\[\begin{aligned}
x_{distorted} & = x(1+k_1r^2+k_2r^4+k_3r^6) \\
y_{distorted} & = y(1+k_1r^2+k_2r^4+k_3r^6)
\end{aligned}
\]
其中:
\(x, y\):在归一化图像坐标系中未失真的坐标点
\(k_1, k_2, k_3\):径向畸变系数
\(r^2 = x^2 + y^2\)
切向畸变(Tangential Distortion)
当镜头和像平面不平行时,会发生切向畸变。

切向畸变系数:
\[\begin{aligned}
x_{distorted} & = x[2p_1xy+p_2(r^2+2x^2)] \\
y_{distorted} & = y[p_1(r^2+2y^2)+2p_2xy] \\
\end{aligned}
\]
其中:
\(x, y\):在归一化图像坐标系中未失真的坐标点
\(p_1, p_2\):切向畸变系数
\(r^2 = x^2 + y^2\)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号