

B-Tree 和 B+Tree
B-Tree
为磁盘等外存储设备设计的一种平衡查找树
原理
磁盘预读
- 依据局部性定理,由于磁盘顺序读取的效率很高,对于具有局部性的程序来说,预读可以提高I/O效率。
- 预读的长度一般为页(page)的整倍数。
- 在查询数据时如果一个页中的每条数据都能有助于定位数据记录的位置,这将会减少磁盘I/O次数,提高查询效率。
结构
- B-Tree结构的数据检索以节点为单位。
- 将一个节点的大小设为等于一个页,这样每个节点只需要一次I/O就可以完全载入。
特性
- 每个节点最多有m个孩子。
- 除了根节点和叶子节点外,其它每个节点至少有Ceil(m/2)个孩子。
- 若根节点不是叶子节点,则至少有2个孩子
- 所有叶子节点都在同一层,且不包含其它关键字信息
- 每个非终端节点包含n个关键字信息
- 关键字的个数n满足:ceil(m/2)-1 <= n <= m-1
- 关键字升序排序。
- Pi(i=1,…n)为指向子树根节点的指针。P(i-1)指向的子树的所有节点关键字均小于ki,但都大于k(i-1)
结构
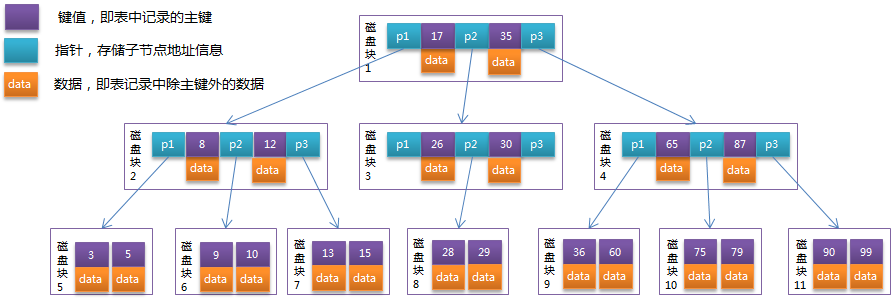
- 每个节点占用一个盘块的磁盘空间,一个节点上有两个升序排序的关键字和三个指向子树根节点的指针,指针存储的是子节点所在磁盘块的地址。
- 两个关键词划分成的三个范围域对应三个指针指向的子树的数据的范围域。
- 以根节点为例,关键字为17和35,P1指针指向的子树的数据范围为小于17,P2指针指向的子树的数据范围为17~35,P3指针指向的子树的数据范围为大于35。
- 模拟查找关键字29的过程:
- 根据根节点找到磁盘块1,读入内存。【磁盘I/O操作第1次】
- 比较关键字29在区间(17,35),找到磁盘块1的指针P2。
- 根据P2指针找到磁盘块3,读入内存。【磁盘I/O操作第2次】
- 比较关键字29在区间(26,30),找到磁盘块3的指针P2。
- 根据P2指针找到磁盘块8,读入内存。【磁盘I/O操作第3次】
- 在磁盘块8中的关键字列表中找到关键字29。
- B-Tree相对于AVLTree缩减了节点个数,使每次磁盘I/O取到内存的数据都发挥了作用,从而提高了查询效率。
- B-Tree中一次检索最多需要h-1次I/O(根节点常驻内存),渐进复杂度为O(h)=O(logdN)。一般实际应用中,出度d是非常大的数字,通常超过100,因此h非常小(通常不超过3)。
综上所述,用B-Tree作为索引结构效率是非常高的。
B+Tree
在B-Tree基础上的一种优化,使其更适合实现外存储索引结构
区别
- 非叶子节点只存储键值信息。
- 所有叶子节点之间都有一个链指针。
- 数据记录都存放在叶子节点中。
作用
加大每个节点存储的key值数量,降低B+Tree的高度。
结构
- 将上一节中的B-Tree优化,假设每个磁盘块能存储4个键值及指针信息,则变成B+Tree后其结构如下图所示:
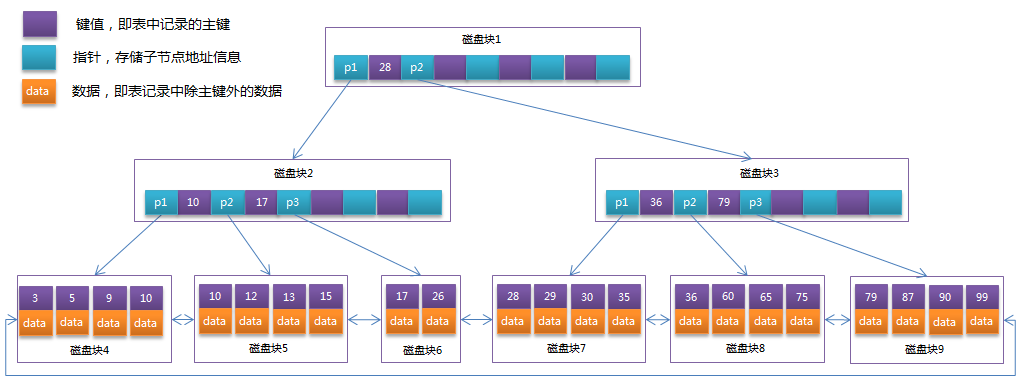
- 通常在B+Tree上有两个头指针,一个指向根节点,另一个指向关键字最小的叶子节点,而且所有叶子节点(即数据节点)之间是一种链式环结构。
- 因此可以对B+Tree进行两种查找运算:一种是对于主键的范围查找和分页查找,另一种是从根节点开始,进行随机查找。
