普通相机与工业相机的区别
前言
本篇重点记录工业相机的特点,这些特点基本都是普通相机没有或者相对薄弱的部分。
工业相机是机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成有序的电信号。选择合适的相机也是机器视觉系统设计中的重要环节,相机的选择不仅直接决定所采集到的图像分辨率、图像质量等,同时也与整个系统的运行模式直接相关。
正文
基本区别
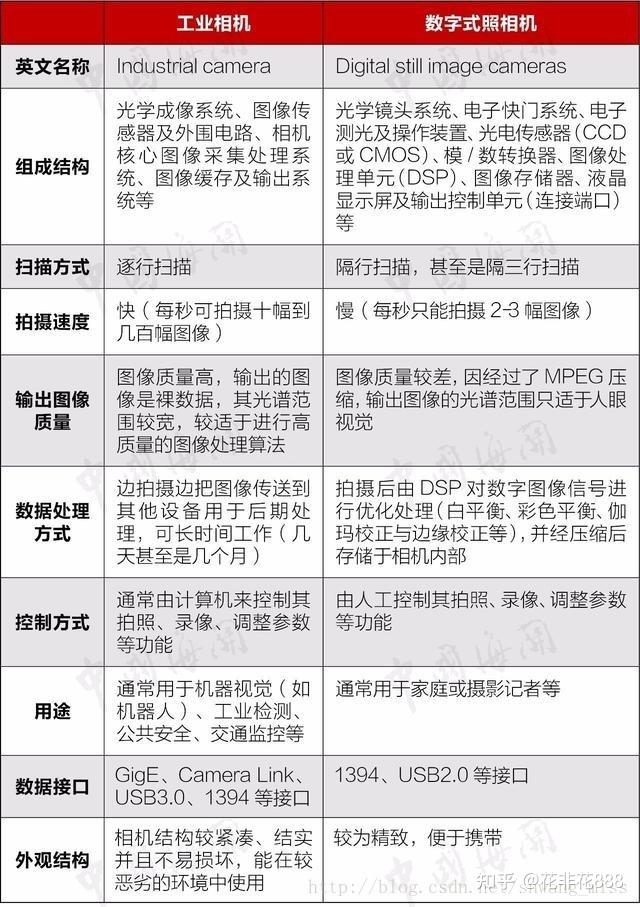
- 工业相机性能稳定也易于安装,相机结构紧凑结实不易损坏,连续工作时间长,可在较差的环境下使用。这点明显优于民用数码相机
- 工业相机的快门时间非常短,可以抓拍高速运动的物体
- 工业相机的图像传感器是逐行扫描的,而普通的相机的图像传感器是隔行扫描的
- 工业相机的帧率远远高于普通相机,工业相机每秒可以拍摄十幅到几百幅图片,而普通相机只能拍摄2-3幅图像,相差较大
- 工业相机输出的是裸数据(raw data),其光谱范围也往往比较宽,比较适合进行高质量的图像处理算法。而普通相机拍摄的图片,其光谱范围只适合人眼视觉,并且经过了mjpeg压缩,图像质量较差,不利于分析处理
- 工业相机支持视觉厂家开发的图像处理软件
- 工业相机集成了许多通讯端口,能够完成与PLC,机器人等设备间的通讯
- 拥有高度灵活的可定制性
- 软件方面:由相配套的软件开发工具包,可以控制相机所有参数的函数,例如曝光时间、触发方式、ROI(Region Of Interest,即感兴趣成像区域的开窗)等等。
- 硬件方面:包括镜头接口,数据接口,外观尺寸,高低温性能,防水防尘性能,等等。
- 工业相机更贵
主要参数
- 分辨率(Resolution):相机每次采集图像的像素点数(Pixel)。
- 像素深度(Pixel Depth):没像素数据的位数,一般常用是8bit,对于数字相机一般还会用10bit, 12bit, 14bit等。
- 最大帧率(Frame Rate)/行频(Line Rate):相机采集传输图像速率,对于面阵相机一般为每秒采集的帧数(Frame/Sec),对于线阵相机为每秒采集的行数(Lines/Sec)。
- 最大帧率(Frame Rate)/行频(Line Rate):相机采集传输图像速率,对于面阵相机一般为每秒采集的帧数(Frame/Sec),对于线阵相机为每秒采集的行数(Lines/Sec)。
- 像素尺寸(Pixel):像元大小,数字相机元尺寸为3um-10um,一般像元尺寸越小,制造难度越大,图像质量越不统一提高。
- 光谱响应特性:一般响应范围是350nm-1000nm,一些相机在靶面前加了一个滤镜,滤除了红外光线,如果系统需要对红外感光时刻去掉该滤镜。
- 接口类型:有Camera Link接口,以太网接口,1394接口,USB接口输出,目前最新接口有CoaXPress接口。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号