



决策树(二)决策树回归
回归
决策树也可以用于执行回归任务。我们首先用sk-learn的DecisionTreeRegressor类构造一颗回归决策树,并在一个带噪声的二次方数据集上进行训练,指定max_depth=2:
import numpy as np # Quadratic training set + noise np.random.seed(42) m = 200 X = np.random.rand(m, 1) y = 4 * (X - 0.5) ** 2 y = y + np.random.randn(m, 1) / 10 from sklearn.tree import DecisionTreeRegressor tree_reg = DecisionTreeRegressor(max_depth=2, random_state=42) tree_reg.fit(X, y)
下图是这棵树的结果:

这棵树看起来与之前构造的分类树类似。主要的区别是:在每个节点中,预测的不是一个类别,而是一个值。例如,假设我们想为一个新的实例x1=0.6做预测。我们会先从根节点遍历树,最终到达预测value=0.111的叶子节点。这个预测值是与这个叶子节点关联的110条训练数据的平均值,并且它在这110条数据上的均方误差等于0.015。
这个模型的预测在如下左图中进行表示。如果设置max_depth=3,则得到如下右图。需要注意的是:每个区域的预测值,都是当前区域中所有目标值的平均值。算法在分割区域时,会以一种让大部分训练数据尽可能地靠近预测的值的方式进行分割。

CART算法在这与之前提到的原理基本类似,除了在分割训练集时,之前是找到一种分割让不纯度最小;现在是找到一种分割让MSE最小。下面是算法要最小化的损失函数:

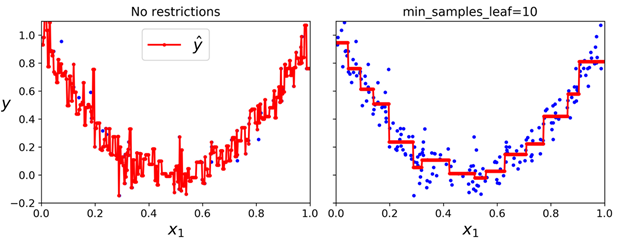
与分类任务一样,在处理回归任务时,决策树也会倾向于过拟合。如果没有任何的正则(例如使用的是默认的参数),则我们会得到下面左图的(在训练集上)预测的结果。很明显这些预测在训练集上是过拟合的。在仅设置min_samples_leaf=10 后,我们可以得到一个更合理的模型,如下右图所示:
不稳定性
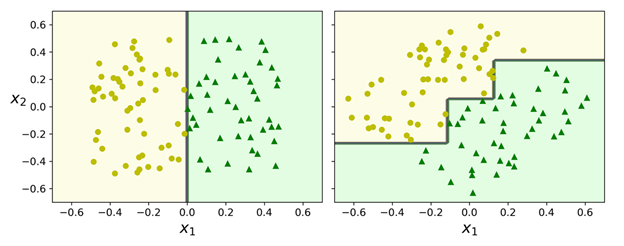
到目前为止,我们已经了解了决策树的基本特点:易于理解与表示、上手简单并且功能强大。不过,它们仍有一些局限性。首先,大家可能已经注意到过,决策树喜欢直角的决策边界(所有的分割都是与一个轴垂直的),这个会让决策树对训练数据的旋转非常敏感。例如,下图是一个简单的线性可分数据集:在左边,一个决策树可以很容易地将它们分割;但是对于右边的图,在数据集旋转了45°之后,决策边界看起来复杂了一些(但是这种复杂很没有必要)。尽管两个决策树都能完美地拟合训练集,但是很大可能右边的模型的泛化性能不会太好。其中一个缓解这个问题的办法是使用主成成分分析(Principal Component Analysis),使用它后,基本可以让训练数据有一个更好的方向(角度)。
不过在决策树中最常见也最主要的问题是:它们对训练集中的微小变化都非常敏感。例如,假设我们仅仅是从iris训练集中移除掉最宽的Iris versicolor(这条数据的length=4.8 cm,width=1.8cm) ,然后重新训练一个新的决策树,我们可能会得到下面的模型:

从这模型里我们可以看到,它与之前训练的决策树模型差别非常大。不过实际上由于sk-learn是随机的(它会随机选择一组特征,在每个节点中进行评估),所以即使是在同样的训练数据上,每次训练出来的模型可能都是差别比较大的(除非设置了random_state 超参数)。
随机森林可以限制这种不稳定性,通过在多个树上取平均预测,我们之后会介绍。

