OpenCV 入门03
特征检测与描述
理解特征
理解什么是特征,为什么 "拐角 corners" 很重要,
理论:
你们大多数人都会玩拼图游戏。你会得到很多小图像,需要正确组装它们以形成大的真实图像。问题是,你怎么做?将相同的理论投影到计算机程序上,以便计算机可以玩拼图游戏呢?如果计算机可以玩拼图游戏,为什么我们不能给计算机提供很多自然风光的真实图像,并告诉计算机将所有这些图像拼接成一个大图像呢?如果计算机可以将多个自然图像缝合在一起,那么如何给建筑物或任何结构提供大量图片并告诉计算机从中创建3D模型呢?
好了,问题和想象力还在继续。但这全都取决于最基本的问题:你如何玩拼图游戏?你如何将许多被扰的图像片段排列成一个大的单张图像?你如何将许多自然图像拼接到一张图像上?
答案是,我们正在寻找独特的,易于跟踪和比较的特定模板或特定特征。如果我们对这种特征进行定义,可能会发现很难用语言来表达它,但是我们知道它们是什么。如果有人要求你指出一项可以在多张图像中进行比较的良好特征,则可以指出其中一项。这就是为什么即使是小孩也可以玩这些游戏的原因。我们在图像中搜索这些特征,找到它们,在其他图像中寻找相同的特征并将它们对齐。仅此而已。(在拼图游戏中,我们更多地研究了不同图像的连续性)。所有这些属性都是我们固有的。
因此,我们的一个基本问题扩展到更多,但变得更加具体。这些特征是什么?(答案对于计算机也应该是可以理解的。)
很难说人类如何发现这些特征。这已经在我们的大脑中进行了编码。但是,如果我们深入研究某些图片并搜索不同的模板,我们会发现一些有趣的东西。例如,看以下的图片:

图像非常简单。在图像的顶部,给出了六个小图像块。你的问题是在原始图像中找到这些补丁的确切位置。你可以找到多少正确的结果?
A和B是平坦的表面,它们散布在很多区域上。很难找到这些补丁的确切位置。
C和D更简单。它们是建筑物的边缘。你可以找到一个大概的位置,但是准确的位置仍然很困难。这是因为沿着边缘的每个地方的图案都是相同的。但是,在边缘,情况有所不同。因此,与平坦区域相比,边缘是更好的特征,但不够好(在拼图游戏中比较边缘的连续性很好)。
最后,E和F是建筑物的某些角落。而且很容易找到它们。因为在拐角处,无论将此修补程序移动到何处,它的外观都将有所不同。因此,它们可以被视为很好的特征。因此,现在我们进入更简单(且被广泛使用的图像)以更好地理解。
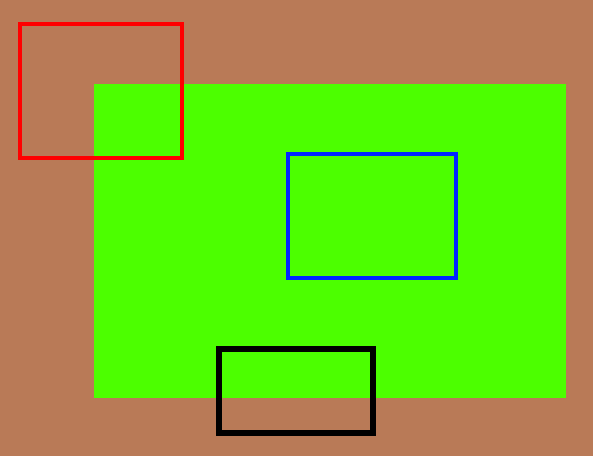
就像上面一样,蓝色补丁是平坦区域,很难找到和跟踪。无论你将蓝色补丁移到何处,它看起来都一样。黑色补丁有一个边缘。如果你沿垂直方向(即沿渐变)移动它,则它会发生变化。沿着边缘(平行于边缘)移动,看起来相同。对于红色补丁,这是一个角落。无论你将补丁移动到何处,它看起来都不同,这意味着它是唯一的。因此,基本上,拐角被认为是图像中的良好特征。
因此,现在我们回答了我们的问题,“这些特性是什么?”。但下一个问题出现了。我们怎么找到他们?或者我们如何找到拐角?。我们以一种直观的方式回答了这个问题,也就是说,在图像周围的所有区域中,当移动(少量)时,在图像中寻找变化最大的区域。这将在接下来的章节中被投射到计算机语言中。因此,找到这些图像特征称为特征检测。
我们在图像中找到了特征。找到它之后,你应该能够在其他图像中找到相同的图像。这是怎么做到的?
我们在特征周围画一个区域,用我们自己的话来解释,比如“上半部是蓝天,下半部是一个建筑的区域,在那个建筑上有玻璃等等”,然后你在其他图像中搜索相同的区域。
基本上,你在描述这个特性。类似地,计算机也应该描述特征周围的区域,以便在其他图像中找到它。所谓的描述就是特征描述。一旦你有了特征和它的描述,你就可以在所有图像中找到相同的特征,并将它们对齐,缝合在一起,或者做任何你想做的事情。
因此,在此模块中,我们正在寻找OpenCV中的不同算法来查找功能,对其进行描述,进行匹配等
Harris Corner Detection (Harris 角检测)
这节将了解”Harris Corner Detection”背后的概念。 我们将看到以下函数:cv.cornerHarris() , cv.cornerSubPix()
理论:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号