ROS入门--参数的使用与编程方法
ROS入门--参数的使用与编程方法
(参考古月居b站视频P16,本文仅为笔记和个人理解)
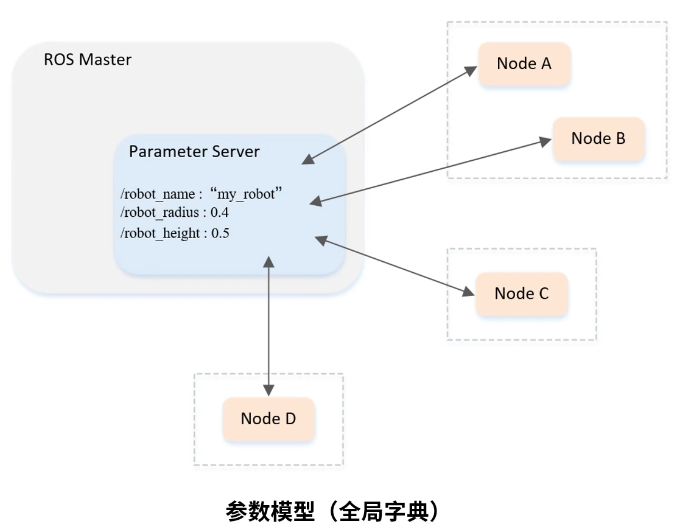
ROS master中有一个参数服务器叫做Parameter server可以查询不同pc端的字典,可以看作 全局变量的空间
一、创建功能包
到工作空间的src下mkdir一个learning_parameter
到工作空间目录下终端输入catkin_create_pkg learning_parameter roscpp rospy std_srvs
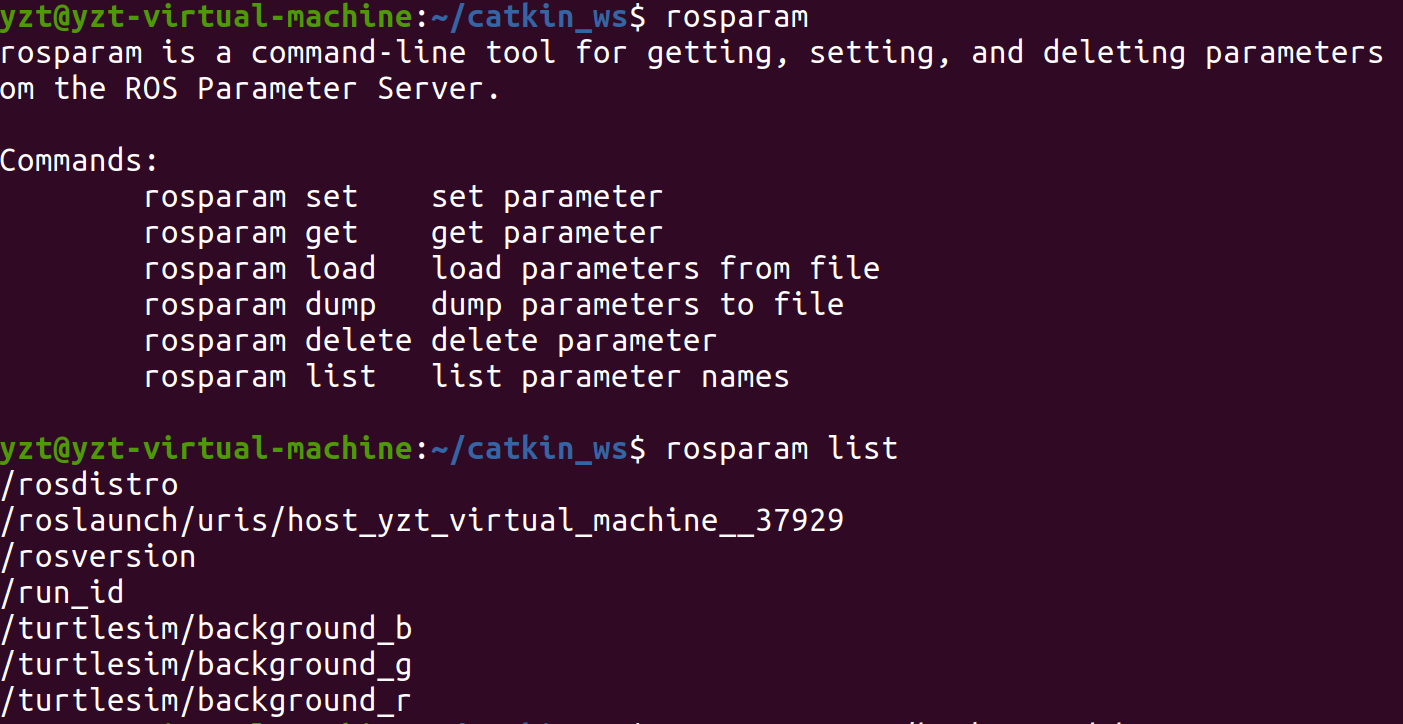
二、参数命令行的使用
终端输入rosparam,会显示rosparam的列表
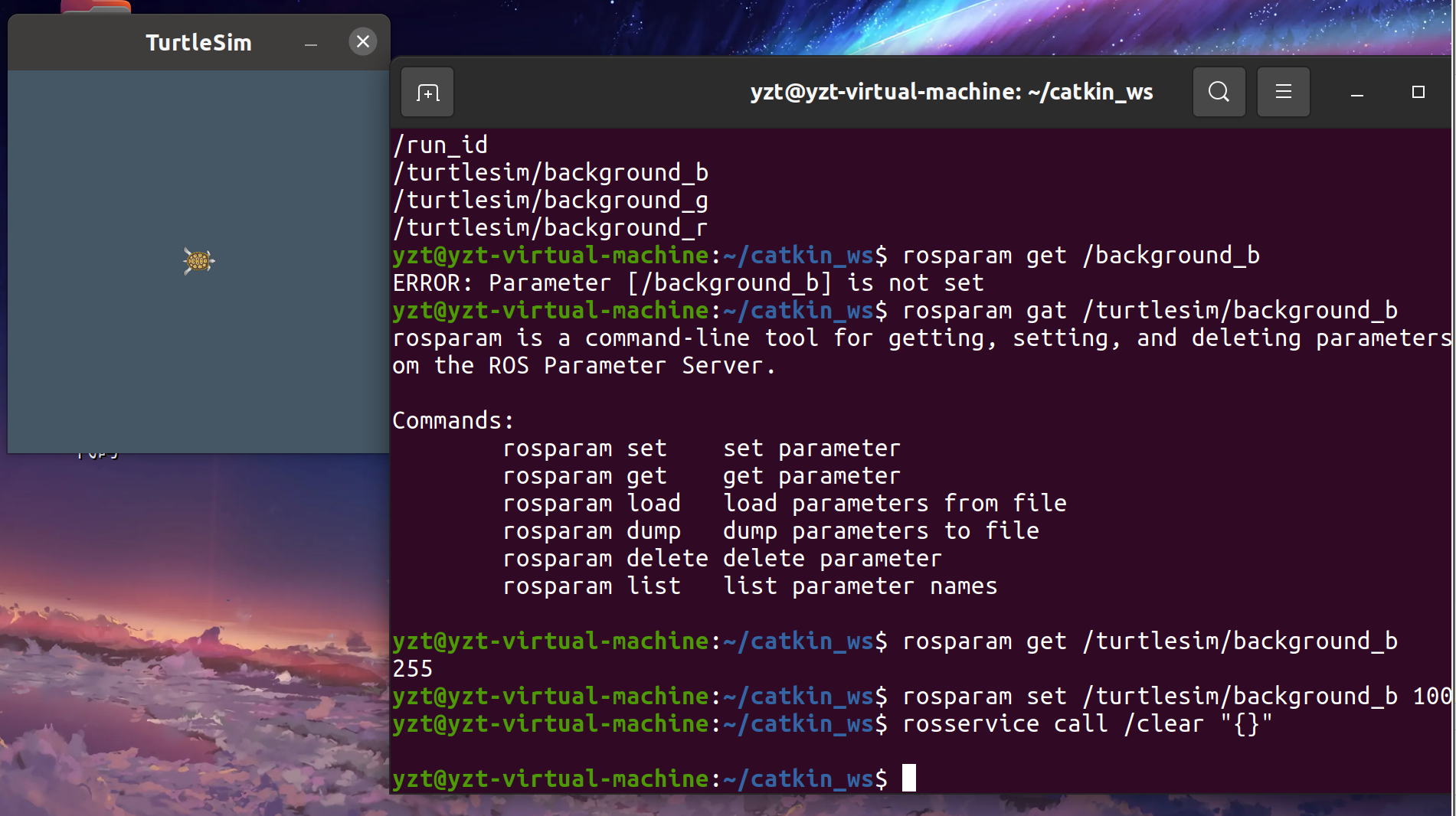
上图可见,使用rosparam set命令可以修改这些参数,修改颜色如图,后使用rosservice call /clear "{}" 呼叫刷新。
可以使用rosparam dump param.yaml 可以保存设置到主目录下文件名字param.yaml 会保存我们在终端查询到的所有参数!
如果对文件进行修改还可以在终端 加载rosparam load param.yaml 这样可以使得当前运行参数改变为自定义的样子。
rosparam delete 可以删除某个参数,会使得当前客户端失去该参数属性。
三、做一个简单的实验(完成读取输出参数,改写输出参数)
代码如下:
/**
* 该例程设置/读取海龟例程中的参数
*/
#include <string>
#include <ros/ros.h>
#include <std_srvs/Empty.h>
int main(int argc, char **argv)
{
int red, green, blue;
// ROS节点初始化
ros::init(argc, argv, "parameter_config");
// 创建节点句柄
ros::NodeHandle node;
// 读取背景颜色参数
ros::param::get("/background_r", red);
ros::param::get("/background_g", green);
ros::param::get("/background_b", blue);
ROS_INFO("Get Backgroud Color[%d, %d, %d]", red, green, blue);
// 设置背景颜色参数
ros::param::set("/background_r", 255);
ros::param::set("/background_g", 255);
ros::param::set("/background_b", 255);
ROS_INFO("Set Backgroud Color[255, 255, 255]");
// 读取背景颜色参数
ros::param::get("/background_r", red);
ros::param::get("/background_g", green);
ros::param::get("/background_b", blue);
ROS_INFO("Re-get Backgroud Color[%d, %d, %d]", red, green, blue);
// 调用服务,刷新背景颜色
ros::service::waitForService("/clear");
ros::ServiceClient clear_background = node.serviceClient<std_srvs::Empty>("/clear");
std_srvs::Empty srv;
clear_background.call(srv);
sleep(1);
return 0;
}
配置编译文件:
add_executable(parameter_config src/parameter_config.cpp)
target_link_LIBRARIES(parameter_config ${catkin_LIBRARIES})
运行:
运行roscore
运行turtlesim节点
运行param节点
本文来自博客园,作者:FrankPlus,转载请注明原文链接:https://www.cnblogs.com/yztbky/p/16069073.html


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· C#/.NET/.NET Core优秀项目和框架2025年2月简报
· Manus爆火,是硬核还是营销?
· 终于写完轮子一部分:tcp代理 了,记录一下
· 【杭电多校比赛记录】2025“钉耙编程”中国大学生算法设计春季联赛(1)