east论文阅读笔记
EAST( Efficient and Accurate Scene Text Detector)
简洁的pipline
FCN+nms
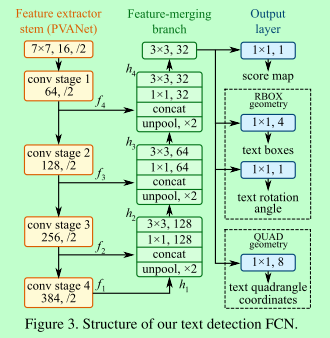
前面的特征提取以及深浅层融合较容易理解,类unet结构;concat后降维
网络输出一个score map 和 几何形状(可选四边形加角度RBOX和四坐标QUAD)
score map是shrunk的GT(1维)(是否在边框内的概率)
RBOX输出是每个像素对于四个边的距离(4维)+ 角度(算法的缺点就在此处,如果是边框靠左的点,预测到右边框的距离比较长,超出感受野范围,通常预测不准确)
QUAD是对于四个坐标的偏移(8维)
score map用于后续nms
标签生成:
score map部分,把原始gt标签缩放0.3,得到一个核区域,positive area粗略地设定为核区域内的元素,
几何形状部分,RBOX对于positive area内的像素预测每个点对于四个边的距离;
QUAD对于positive area内的元素预测每个像素对于四个坐标的offset.
loss计算
两部分,一个score map的loss,一个几何体的loss
score map 的loss:
为了提高速度,避免以往目标检测常用的平衡正负样本难易样本的策略,只使用类平衡交叉熵(实际使用dice loss的更多,收敛快)
几何体的loss:
(特殊性,文本的尺度变化比较大,直接用l1 loss会使得loss的偏差朝更大更长发展,为了兼具预测大尺度和小尺度的文本框,故采用Iou loss和尺度归一化的smooth l1 loss)
RBOX采用iou loss
QUAD采用尺度归一化的smooth l1 loss
locality-aware NMS(局部感知)
NMS之前还进行了行几何体的合并,基于临近的像素预测的几何体高度相关的假设,加权合并同一行像素预测的几何体,可以减小计算压力,按照score加权合并几何体,之后再进行普通的NMS
凤舞九天


