Deeplab v3+的结构代码简要分析
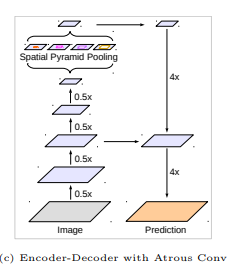
添加了解码模块来重构精确的图像物体边界。对比如图
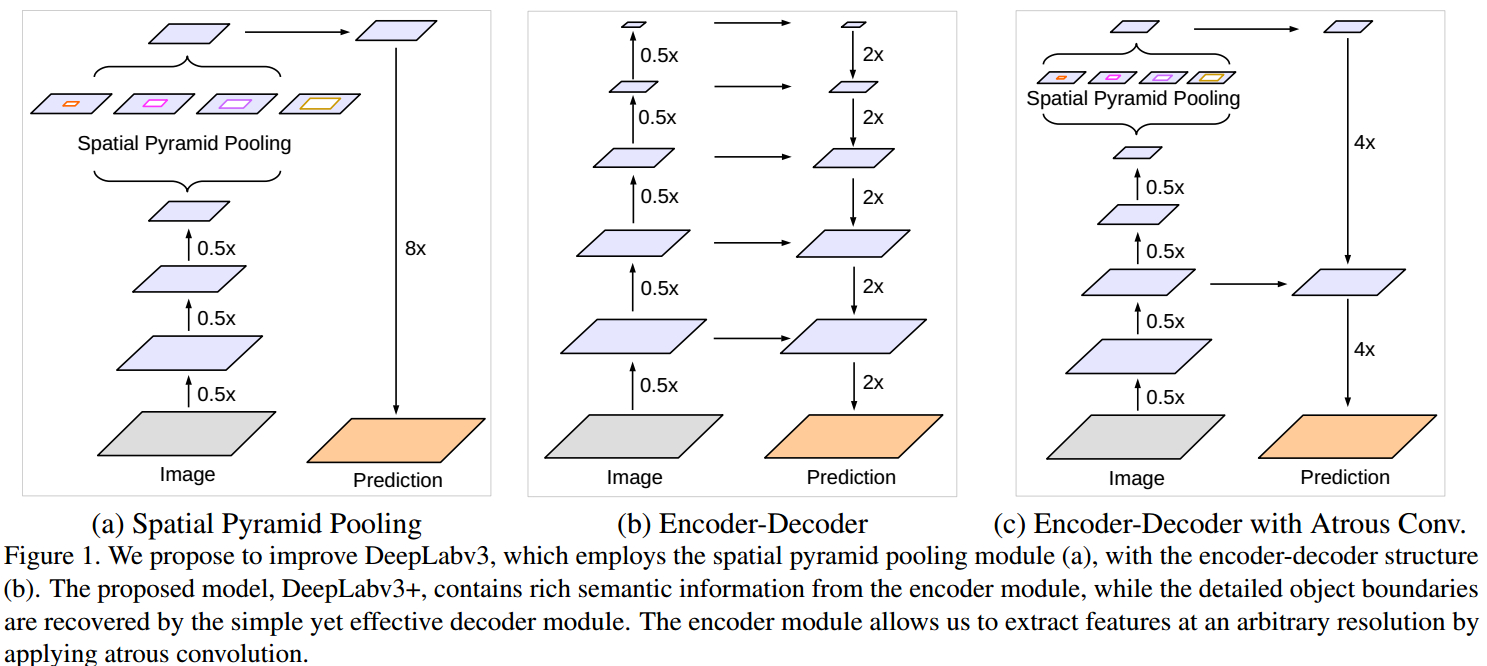
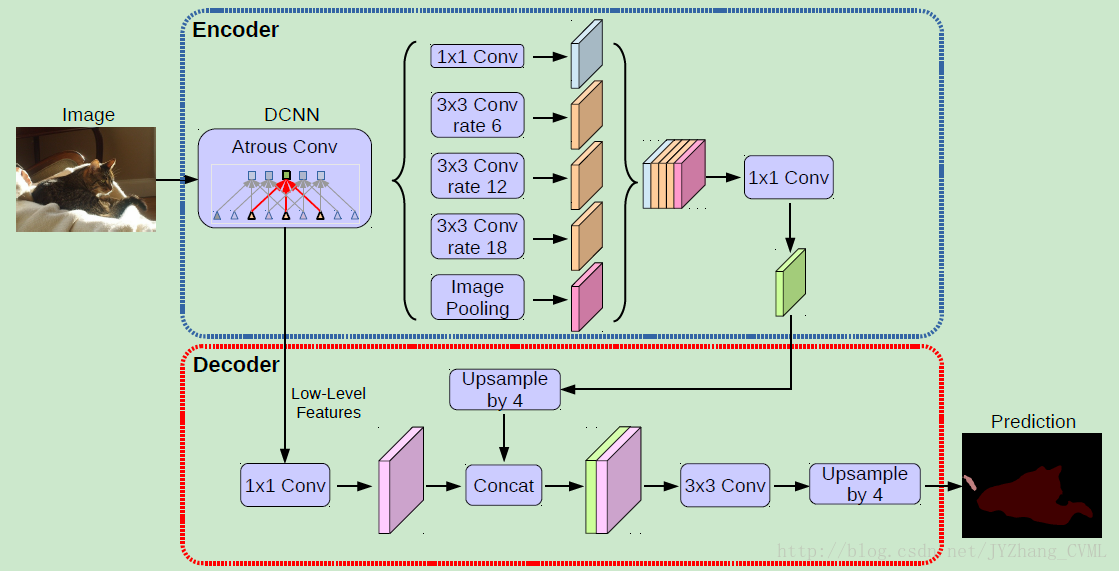
deeplab v3+采用了与deeplab v3类似的多尺度带洞卷积结构ASPP,然后通过上采样,以及与不同卷积层相拼接,最终经过卷积以及上采样得到结果。
deeplab v3:
基于提出的编码-解码结构,可以任意通过控制 atrous convolution 来输出编码特征的分辨率,来平衡精度和运行时间(已有编码-解码结构不具有该能力.).
可以用来挖掘不同尺度的上下文信息
PSPNet 对不同尺度的网络进行池化处理,处理多尺度的上下文内容信息
deeplab v3+以resnet101为backbone
1 import math 2 import torch 3 import torch.nn as nn 4 import torch.nn.functional as F 5 import torch.utils.model_zoo as model_zoo 6 from modeling.sync_batchnorm.batchnorm import SynchronizedBatchNorm2d 7 8 BatchNorm2d = SynchronizedBatchNorm2d 9 10 class Bottleneck(nn.Module):
#'resnet网络的基本框架’ 11 expansion = 4 12 13 def __init__(self, inplanes, planes, stride=1, dilation=1, downsample=None): 14 super(Bottleneck, self).__init__() 15 self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False) 16 self.bn1 = BatchNorm2d(planes) 17 self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride, 18 dilation=dilation, padding=dilation, bias=False) 19 self.bn2 = BatchNorm2d(planes) 20 self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False) 21 self.bn3 = BatchNorm2d(planes * 4) 22 self.relu = nn.ReLU(inplace=True) 23 self.downsample = downsample 24 self.stride = stride 25 self.dilation = dilation 26 27 def forward(self, x): 28 residual = x 29 30 out = self.conv1(x) 31 out = self.bn1(out) 32 out = self.relu(out) 33 34 out = self.conv2(out) 35 out = self.bn2(out) 36 out = self.relu(out) 37 38 out = self.conv3(out) 39 out = self.bn3(out) 40 41 if self.downsample is not None: 42 residual = self.downsample(x) 43 44 out += residual 45 out = self.relu(out) 46 47 return out 48 49 class ResNet(nn.Module): 50 #renet网络的构成部分 51 def __init__(self, nInputChannels, block, layers, os=16, pretrained=False): 52 self.inplanes = 64 53 super(ResNet, self).__init__() 54 if os == 16: 55 strides = [1, 2, 2, 1] 56 dilations = [1, 1, 1, 2] 57 blocks = [1, 2, 4] 58 elif os == 8: 59 strides = [1, 2, 1, 1] 60 dilations = [1, 1, 2, 2] 61 blocks = [1, 2, 1] 62 else: 63 raise NotImplementedError 64 65 # Modules 66 self.conv1 = nn.Conv2d(nInputChannels, 64, kernel_size=7, stride=2, padding=3, 67 bias=False) 68 self.bn1 = BatchNorm2d(64) 69 self.relu = nn.ReLU(inplace=True) 70 self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1) 71 72 self.layer1 = self._make_layer(block, 64, layers[0], stride=strides[0], dilation=dilations[0]) 73 self.layer2 = self._make_layer(block, 128, layers[1], stride=strides[1], dilation=dilations[1]) 74 self.layer3 = self._make_layer(block, 256, layers[2], stride=strides[2], dilation=dilations[2]) 75 self.layer4 = self._make_MG_unit(block, 512, blocks=blocks, stride=strides[3], dilation=dilations[3]) 76 77 self._init_weight() 78 79 if pretrained: 80 self._load_pretrained_model() 81 82 def _make_layer(self, block, planes, blocks, stride=1, dilation=1): 83 downsample = None 84 if stride != 1 or self.inplanes != planes * block.expansion: 85 downsample = nn.Sequential( 86 nn.Conv2d(self.inplanes, planes * block.expansion, 87 kernel_size=1, stride=stride, bias=False), 88 BatchNorm2d(planes * block.expansion), 89 ) 90 91 layers = [] 92 layers.append(block(self.inplanes, planes, stride, dilation, downsample)) 93 self.inplanes = planes * block.expansion 94 for i in range(1, blocks): 95 layers.append(block(self.inplanes, planes)) 96 97 return nn.Sequential(*layers) 98 99 def _make_MG_unit(self, block, planes, blocks=[1, 2, 4], stride=1, dilation=1): 100 downsample = None 101 if stride != 1 or self.inplanes != planes * block.expansion: 102 downsample = nn.Sequential( 103 nn.Conv2d(self.inplanes, planes * block.expansion, 104 kernel_size=1, stride=stride, bias=False), 105 BatchNorm2d(planes * block.expansion), 106 ) 107 108 layers = [] 109 layers.append(block(self.inplanes, planes, stride, dilation=blocks[0]*dilation, downsample=downsample)) 110 self.inplanes = planes * block.expansion 111 for i in range(1, len(blocks)): 112 layers.append(block(self.inplanes, planes, stride=1, dilation=blocks[i]*dilation)) 113 114 return nn.Sequential(*layers) 115 116 def forward(self, input): 117 x = self.conv1(input) 118 x = self.bn1(x) 119 x = self.relu(x) 120 x = self.maxpool(x) 121 122 x = self.layer1(x) 123 low_level_feat = x 124 x = self.layer2(x) 125 x = self.layer3(x) 126 x = self.layer4(x) 127 return x, low_level_feat 128 129 def _init_weight(self): 130 for m in self.modules(): 131 if isinstance(m, nn.Conv2d): 132 n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels 133 m.weight.data.normal_(0, math.sqrt(2. / n)) 134 elif isinstance(m, BatchNorm2d): 135 m.weight.data.fill_(1) 136 m.bias.data.zero_() 137 138 def _load_pretrained_model(self): 139 pretrain_dict = model_zoo.load_url('https://download.pytorch.org/models/resnet101-5d3b4d8f.pth') 140 model_dict = {} 141 state_dict = self.state_dict() 142 for k, v in pretrain_dict.items(): 143 if k in state_dict: 144 model_dict[k] = v 145 state_dict.update(model_dict) 146 self.load_state_dict(state_dict) 147 148 def ResNet101(nInputChannels=3, os=16, pretrained=False): 149 model = ResNet(nInputChannels, Bottleneck, [3, 4, 23, 3], os, pretrained=pretrained) 150 return model 151 152 153 class ASPP_module(nn.Module):
#ASpp模块的组成 154 def __init__(self, inplanes, planes, dilation): 155 super(ASPP_module, self).__init__() 156 if dilation == 1: 157 kernel_size = 1 158 padding = 0 159 else: 160 kernel_size = 3 161 padding = dilation 162 self.atrous_convolution = nn.Conv2d(inplanes, planes, kernel_size=kernel_size, 163 stride=1, padding=padding, dilation=dilation, bias=False) 164 self.bn = BatchNorm2d(planes) 165 self.relu = nn.ReLU() 166 167 self._init_weight() 168 169 def forward(self, x): 170 x = self.atrous_convolution(x) 171 x = self.bn(x) 172 173 return self.relu(x) 174 175 def _init_weight(self): 176 for m in self.modules(): 177 if isinstance(m, nn.Conv2d): 178 n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels 179 m.weight.data.normal_(0, math.sqrt(2. / n)) 180 elif isinstance(m, BatchNorm2d): 181 m.weight.data.fill_(1) 182 m.bias.data.zero_() 183 184 185 class DeepLabv3_plus(nn.Module):
#正式开始deeplabv3+的结构组成 186 def __init__(self, nInputChannels=3, n_classes=21, os=16, pretrained=False, freeze_bn=False, _print=True): 187 if _print: 188 print("Constructing DeepLabv3+ model...") 189 print("Backbone: Resnet-101") 190 print("Number of classes: {}".format(n_classes)) 191 print("Output stride: {}".format(os)) 192 print("Number of Input Channels: {}".format(nInputChannels)) 193 super(DeepLabv3_plus, self).__init__() 194 195 # Atrous Conv 首先获得从resnet101中提取的features map 196 self.resnet_features = ResNet101(nInputChannels, os, pretrained=pretrained) 197 198 # ASPP,挑选参数 199 if os == 16: 200 dilations = [1, 6, 12, 18] 201 elif os == 8: 202 dilations = [1, 12, 24, 36] 203 else: 204 raise NotImplementedError 205 #四个不同带洞卷积的设置,获取不同感受野 206 self.aspp1 = ASPP_module(2048, 256, dilation=dilations[0]) 207 self.aspp2 = ASPP_module(2048, 256, dilation=dilations[1]) 208 self.aspp3 = ASPP_module(2048, 256, dilation=dilations[2]) 209 self.aspp4 = ASPP_module(2048, 256, dilation=dilations[3]) 210 211 self.relu = nn.ReLU() 212 #全局平均池化层的设置 213 self.global_avg_pool = nn.Sequential(nn.AdaptiveAvgPool2d((1, 1)), 214 nn.Conv2d(2048, 256, 1, stride=1, bias=False), 215 BatchNorm2d(256), 216 nn.ReLU()) 217 218 self.conv1 = nn.Conv2d(1280, 256, 1, bias=False) 219 self.bn1 = BatchNorm2d(256) 220 221 # adopt [1x1, 48] for channel reduction. 222 self.conv2 = nn.Conv2d(256, 48, 1, bias=False) 223 self.bn2 = BatchNorm2d(48) 224 #结构图中的解码部分的最后一个3*3的卷积块 225 self.last_conv = nn.Sequential(nn.Conv2d(304, 256, kernel_size=3, stride=1, padding=1, bias=False), 226 BatchNorm2d(256), 227 nn.ReLU(), 228 nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1, bias=False), 229 BatchNorm2d(256), 230 nn.ReLU(), 231 nn.Conv2d(256, n_classes, kernel_size=1, stride=1)) 232 if freeze_bn: 233 self._freeze_bn() 234 #前向传播 235 def forward(self, input): 236 x, low_level_features = self.resnet_features(input) 237 x1 = self.aspp1(x) 238 x2 = self.aspp2(x) 239 x3 = self.aspp3(x) 240 x4 = self.aspp4(x) 241 x5 = self.global_avg_pool(x) 242 x5 = F.upsample(x5, size=x4.size()[2:], mode='bilinear', align_corners=True) 243 #把四个ASPP模块以及全局池化层拼接起来 244 x = torch.cat((x1, x2, x3, x4, x5), dim=1) 245 #上采样 246 x = self.conv1(x) 247 x = self.bn1(x) 248 x = self.relu(x) 249 x = F.upsample(x, size=(int(math.ceil(input.size()[-2]/4)), 250 int(math.ceil(input.size()[-1]/4))), mode='bilinear', align_corners=True) 251 252 low_level_features = self.conv2(low_level_features) 253 low_level_features = self.bn2(low_level_features) 254 low_level_features = self.relu(low_level_features) 255 256 #拼接低层次的特征,然后再通过插值获取原图大小的结果 257 x = torch.cat((x, low_level_features), dim=1) 258 x = self.last_conv(x) 259 x = F.interpolate(x, size=input.size()[2:], mode='bilinear', align_corners=True) 260 261 return x 262 263 def _freeze_bn(self): 264 for m in self.modules(): 265 if isinstance(m, BatchNorm2d): 266 m.eval() 267 268 def _init_weight(self): 269 for m in self.modules(): 270 if isinstance(m, nn.Conv2d): 271 n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels 272 m.weight.data.normal_(0, math.sqrt(2. / n)) 273 elif isinstance(m, BatchNorm2d): 274 m.weight.data.fill_(1) 275 m.bias.data.zero_() 276 277 def get_1x_lr_params(model): 278 """ 279 This generator returns all the parameters of the net except for 280 the last classification layer. Note that for each batchnorm layer, 281 requires_grad is set to False in deeplab_resnet.py, therefore this function does not return 282 any batchnorm parameter 283 """ 284 b = [model.resnet_features] 285 for i in range(len(b)): 286 for k in b[i].parameters(): 287 if k.requires_grad: 288 yield k 289 290 291 def get_10x_lr_params(model): 292 """ 293 This generator returns all the parameters for the last layer of the net, 294 which does the classification of pixel into classes 295 """ 296 b = [model.aspp1, model.aspp2, model.aspp3, model.aspp4, model.conv1, model.conv2, model.last_conv] 297 for j in range(len(b)): 298 for k in b[j].parameters(): 299 if k.requires_grad: 300 yield k 301 302 303 if __name__ == "__main__": 304 model = DeepLabv3_plus(nInputChannels=3, n_classes=21, os=16, pretrained=True, _print=True) 305 model.eval() 306 image = torch.randn(1, 3, 512, 512) 307 with torch.no_grad(): 308 output = model.forward(image) 309 print(output.size())
凤舞九天

 浙公网安备 33010602011771号
浙公网安备 33010602011771号