
c++图像处理程序编译成.so动态链接库供Java调用(包含jni文件与引用第三方动态链接库opencv)
一、linux编译so文件需要准备的环境
1、安装JDK(注意:不能安装openjdk,因为openjdk没有include目录,编译时需要用到include目录的头文件)
2、安装gcc和g++ ( yum install gcc-c++) 、(yum install cmake3)
3、本案例使用到第三方opencv动态链接库,所以需要安装opencv
3.1:首先官网下载opencv,地址:https://opencv.org/releases/
3.2:tar -zxvf opencv-4.5.0.zip -C /opt/module/
3.3:cd opencv-4.5.0 ->mkdir build->cd build->cmake -D CMAKE_BUILD_TYPE=RELEASE -D OPENCV_GENERATE_PKGCONFIG=ON -D CMAKE_INSTALL_PREFIX=/usr/local ..(此操作不能丢失..,编译时间比较久)
3.4:make install,头文件被放在/usr/local/include/opencv4/opencv2/目录下,我们的库文件被放在/usr/local/lib64/目录下
查看opencv的动态库文件存在地址
3.5:查看opencv安装版本
3.6:建立软连接:sudo ln -s /usr/local/lib64/pkgconfig/opencv4.pc /usr/share/pkgconfig/
3.7:pkg-config --cflags --libs opencv4

4、为防止生成的so文件找不到依赖库,使用vim /etc/ld.so.conf.d/opencv4.conf,保存并使用此命令让其生效:sudo ldconfig(/etc/Id.so.conf详解:https://www.cnblogs.com/chris-cp/p/3591306.html)
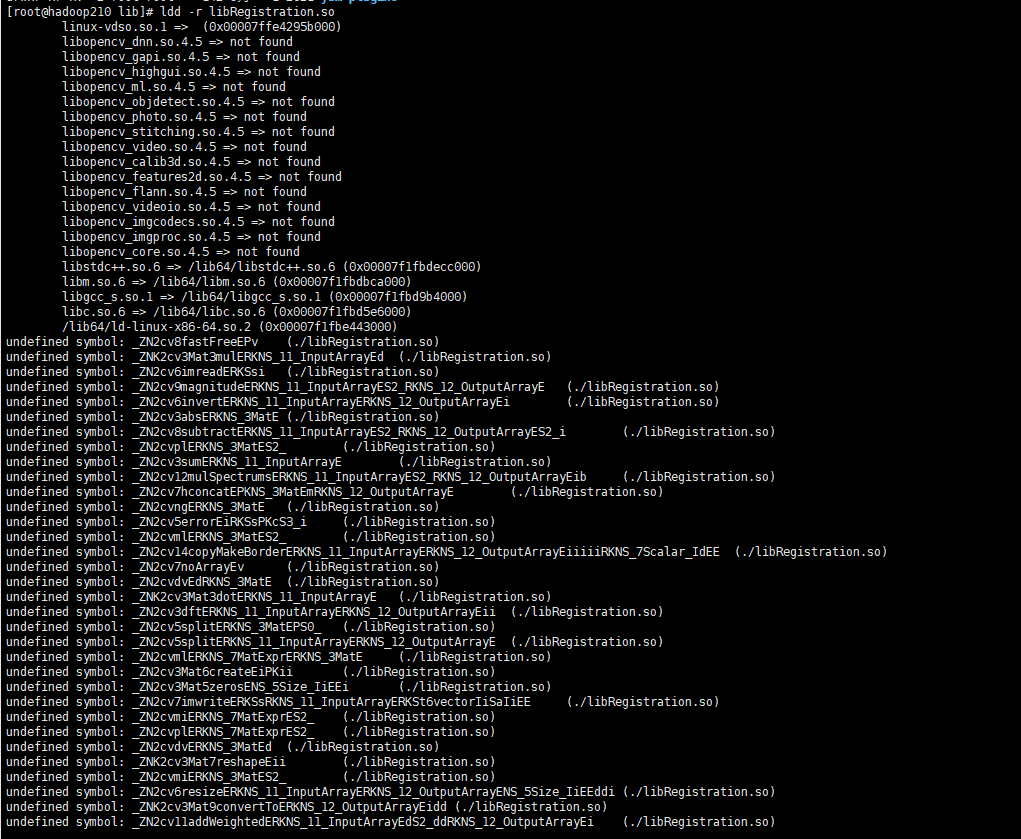
注意出现:undefined symbol,就是因为找不到opencv的一些so依赖库导致的
/usr/local/lib64
5、需要使用到的cpp文件
5.1:com_htzs_insar_jni_Registration.cpp


#include<stdio.h>
#include"com_htzs_insar_jni_Registration.h"
#include"ComplexMat.h"
#include"Utils.h"
#include"Registration.h"
using namespace InSAR;
using namespace cv;
static const char* const Pointclasspath = "com/htzs/insar/jni/Point";
static const char* const Fitclasspath = "com/htzs/insar/jni/Fit";
/** @brief 抛出异常
@param env JNIEnv指针
@param msg 异常情况
*/
void ThrowException(JNIEnv* env, const char* msg)
{
jclass cls = env->FindClass("com/htzs/insar/jni/InSAR_JNIException");
if (!cls) return;
jmethodID methodID = env->GetMethodID(cls, "<init>", "(Ljava/lang/String;)V");
if (!methodID) return;
char buffer[512] = { 0 };
sprintf(buffer, "InSAR_JNIException !: %s", msg);
jstring str = env->NewStringUTF(buffer);
jthrowable thr = (jthrowable)env->NewObject(cls, methodID, str);
env->Throw(thr);
env->DeleteLocalRef(str);
env->DeleteLocalRef(thr);
}
/** @brief 插值并计算偏移量
@param lineSize 每行元素数量
@param master_real 主图像实部数组
@param master_imag 主图像虚部数组
@param slave_real 辅图像实部数组
@param slave_imag 辅图像虚部数组
@return offset 偏移量
*/
JNIEXPORT jobject JNICALL Java_com_htzs_insar_jni_Registration_calcOffset(
JNIEnv* env,
jclass,
jint lineSize,
jshortArray master_real,
jshortArray master_imag,
jshortArray slave_real,
jshortArray slave_imag
)
{
char msg[512];
//获取主辅图像数据
jint num = env->GetArrayLength(master_real);
jint rows = num / lineSize;
ComplexMat master(rows, lineSize), slave(rows, lineSize);
master.convertTo(master, CV_16S);
slave.convertTo(slave, CV_16S);
jshort* data = NULL;
data = env->GetShortArrayElements(master_real, NULL);
memcpy(master.re.data, data, sizeof(short) * num);
env->ReleaseShortArrayElements(master_real, data, 0);
data = env->GetShortArrayElements(master_imag, NULL);
memcpy(master.im.data, data, sizeof(short) * num);
env->ReleaseShortArrayElements(master_imag, data, 0);
data = env->GetShortArrayElements(slave_real, NULL);
memcpy(slave.re.data, data, sizeof(short) * num);
env->ReleaseShortArrayElements(slave_real, data, 0);
data = env->GetShortArrayElements(slave_imag, NULL);
memcpy(slave.im.data, data, sizeof(short) * num);
env->ReleaseShortArrayElements(slave_imag, data, 0);
//short型转换至double型
master.convertTo(master, CV_64F);
slave.convertTo(slave, CV_64F);
//插值8倍并计算偏移量
Registration regis; Utils util;
ComplexMat master_tmp, slave_tmp;
Mat coherence; double coh = 0.0; int offset_row, offset_col;
int ret;
//粗配准
ComplexMat master_temp, slave_temp;
int move_r, move_c;
ret = regis.registration_pixel(master, slave, &move_r, &move_c);
if (ret < 0)
{
sprintf(msg, "(line %d in file %s)!\n", __LINE__, __FILE__);
ThrowException(env, msg);
return jobject();
}
ret = util.complex_coherence(master, slave, coherence);
if (ret < 0)
{
sprintf(msg, "(line %d in file %s)!\n", __LINE__, __FILE__);
ThrowException(env, msg);
return jobject();
}
coh = mean(coherence)[0];
int nr = master.GetRows(); int nc = master.GetCols();
if (nr == 1 || nc == 1)
{
sprintf(msg, "(line %d in file %s)!\n", __LINE__, __FILE__);
ThrowException(env, msg);
return jobject();
}
nr = nr % 2 == 0 ? nr : nr - 1;
nc = nc % 2 == 0 ? nc : nc - 1;
master = master(Range(0, nr), Range(0, nc));
slave = slave(Range(0, nr), Range(0, nc));
ret = regis.interp_paddingzero(master, master_temp, 8);
if (ret < 0)
{
sprintf(msg, "(line %d in file %s)!\n", __LINE__, __FILE__);
ThrowException(env, msg);
return jobject();
}
ret = regis.interp_paddingzero(slave, slave_temp, 8);
if (ret < 0)
{
sprintf(msg, "(line %d in file %s)!\n", __LINE__, __FILE__);
ThrowException(env, msg);
return jobject();
}
ret = regis.real_coherent(master_temp, slave_temp, &offset_row, &offset_col);
if (ret < 0)
{
sprintf(msg, "(line %d in file %s)!\n", __LINE__, __FILE__);
ThrowException(env, msg);
return jobject();
}
jclass Point = env->FindClass(Pointclasspath);
jmethodID methodID = env->GetMethodID(Point, "<init>", "()V");
jobject p = env->NewObject(Point, methodID);
jfieldID fid = env->GetFieldID(Point, "row", "D");
jfieldID fid2 = env->GetFieldID(Point, "col", "D");
jfieldID fid3 = env->GetFieldID(Point, "coherence", "D");
env->SetDoubleField(p, fid, (double)offset_row / 8.0 + (double)move_r);
env->SetDoubleField(p, fid2, (double)offset_col / 8.0 + (double)move_c);
env->SetDoubleField(p, fid3, coh);
return p;
}
/** @brief 根据各子块中心坐标和偏移量拟合整张图每个像素的偏移量
@param offset 各子块偏移量数组
@param center_coordinate 各子块中心坐标数组
@return Fit 偏移量拟合系数(a0-a5,b0-b5)
*/
JNIEXPORT jobject JNICALL Java_com_htzs_insar_jni_Registration_fitting
(JNIEnv* env, jclass job, jobjectArray offset_array, jobjectArray center_coordinate_array, jdouble coh_thresh)
{
//读取子块中心坐标和偏移量数据
char msg[512];
jint num_obj = env->GetArrayLength(offset_array);
if (num_obj < 7)
{
sprintf(msg, "(line %d in file %s)!\n", __LINE__, __FILE__);
ThrowException(env, msg);
return jobject();
}
Mat offset_r, offset_c, offset_coord_row, offset_coord_col, coh_array;
offset_r.create(num_obj, 1, CV_64F); offset_c.create(num_obj, 1, CV_64F);
offset_coord_row.create(num_obj, 1, CV_64F); offset_coord_col.create(num_obj, 1, CV_64F); coh_array.create(num_obj, 1, CV_64F);
jclass Point = env->FindClass(Pointclasspath);
jfieldID offset_row_ID = env->GetFieldID(Point, "row", "D");
jfieldID offset_col_ID = env->GetFieldID(Point, "col", "D");
jfieldID coh_ID = env->GetFieldID(Point, "coherence", "D");
jobject offset;
jdouble offset_col, offset_row, coh;
double count = 0;
coh_thresh = coh_thresh > 0.85 ? 0.85 : coh_thresh;
for (jint i = 0; i < num_obj; i++)
{
offset = env->GetObjectArrayElement(offset_array, i);
offset_row = env->GetDoubleField(offset, offset_row_ID);
offset_col = env->GetDoubleField(offset, offset_col_ID);
coh = env->GetDoubleField(offset, coh_ID);
env->DeleteLocalRef(offset);
offset_r.at<double>(i, 0) = offset_row;
offset_c.at<double>(i, 0) = offset_col;
coh_array.at<double>(i, 0) = coh;
if (coh > coh_thresh) count++;
offset = env->GetObjectArrayElement(center_coordinate_array, i);
offset_row = env->GetDoubleField(offset, offset_row_ID);
offset_col = env->GetDoubleField(offset, offset_col_ID);
env->DeleteLocalRef(offset);
offset_coord_row.at<double>(i, 0) = offset_row;
offset_coord_col.at<double>(i, 0) = offset_col;
}
if (count < 7)
{
sprintf(msg, "(line %d in file %s)!\n", __LINE__, __FILE__);
ThrowException(env, msg);
return jobject();
}
//利用相关系数筛掉配准异常子块的偏移量
Mat offset_coord_row_sifted, offset_coord_col_sifted, offset_r_sifted, offset_c_sifted;
offset_coord_row_sifted.create(count, 1, CV_64F);
offset_coord_col_sifted.create(count, 1, CV_64F);
offset_r_sifted.create(count, 1, CV_64F);
offset_c_sifted.create(count, 1, CV_64F);
count = 0;
for (int i = 0; i < num_obj; i++)
{
if (coh_array.at<double>(i, 0) > coh_thresh)
{
offset_coord_row_sifted.at<double>(count, 0) = offset_coord_row.at<double>(i, 0);
offset_coord_col_sifted.at<double>(count, 0) = offset_coord_col.at<double>(i, 0);
offset_r_sifted.at<double>(count, 0) = offset_r.at<double>(i, 0);
offset_c_sifted.at<double>(count, 0) = offset_c.at<double>(i, 0);
count++;
}
}
offset_coord_row_sifted.copyTo(offset_coord_row);
offset_coord_col_sifted.copyTo(offset_coord_col);
offset_r_sifted.copyTo(offset_r);
offset_c_sifted.copyTo(offset_c);
num_obj = count;
Mat A = Mat::ones(num_obj, 6, CV_64F);
Mat temp, A_t;
offset_coord_col.copyTo(A(Range(0, num_obj), Range(1, 2)));
offset_coord_row.copyTo(A(Range(0, num_obj), Range(2, 3)));
temp = offset_coord_col.mul(offset_coord_row);
temp.copyTo(A(Range(0, num_obj), Range(3, 4)));
temp = offset_coord_col.mul(offset_coord_col);
temp.copyTo(A(Range(0, num_obj), Range(4, 5)));
temp = offset_coord_row.mul(offset_coord_row);
temp.copyTo(A(Range(0, num_obj), Range(5, 6)));
transpose(A, A_t);
Mat b_r, b_c, coef_r, coef_c, error_r, error_c, b_t, a, a_t;
A.copyTo(a);
cv::transpose(a, a_t);
offset_r.copyTo(b_r);
b_r = A_t * b_r;
offset_c.copyTo(b_c);
b_c = A_t * b_c;
A = A_t * A;
double rms1 = -1.0; double rms2 = -1.0;
Mat eye = Mat::zeros(num_obj, num_obj, CV_64F);
for (int i = 0; i < num_obj; i++)
{
eye.at<double>(i, i) = 1.0;
}
if (cv::invert(A, error_r, cv::DECOMP_LU) > 0)
{
cv::transpose(offset_r, b_t);
error_r = b_t * (eye - a * error_r * a_t) * offset_r;
rms1 = sqrt(error_r.at<double>(0, 0) / double(num_obj));
}
if (cv::invert(A, error_c, cv::DECOMP_LU) > 0)
{
cv::transpose(offset_c, b_t);
error_c = b_t * (eye - a * error_c * a_t) * offset_c;
rms2 = sqrt(error_c.at<double>(0, 0) / double(num_obj));
}
if (!cv::solve(A, b_r, coef_r, cv::DECOMP_NORMAL))
{
sprintf(msg, "(line %d in file %s)!\n", __LINE__, __FILE__);
ThrowException(env, msg);
return jobject();
}
if (!cv::solve(A, b_c, coef_c, cv::DECOMP_NORMAL))
{
sprintf(msg, "(line %d in file %s)!\n", __LINE__, __FILE__);
ThrowException(env, msg);
return jobject();
}
jclass Fit = env->FindClass(Fitclasspath);
jmethodID init_ID = env->GetMethodID(Fit, "<init>", "()V");
jobject fit = env->NewObject(Fit, init_ID);
jfieldID a0 = env->GetFieldID(Fit, "a0", "D");
jfieldID a1 = env->GetFieldID(Fit, "a1", "D");
jfieldID a2 = env->GetFieldID(Fit, "a2", "D");
jfieldID a3 = env->GetFieldID(Fit, "a3", "D");
jfieldID a4 = env->GetFieldID(Fit, "a4", "D");
jfieldID a5 = env->GetFieldID(Fit, "a5", "D");
jfieldID b0 = env->GetFieldID(Fit, "b0", "D");
jfieldID b1 = env->GetFieldID(Fit, "b1", "D");
jfieldID b2 = env->GetFieldID(Fit, "b2", "D");
jfieldID b3 = env->GetFieldID(Fit, "b3", "D");
jfieldID b4 = env->GetFieldID(Fit, "b4", "D");
jfieldID b5 = env->GetFieldID(Fit, "b5", "D");
env->SetDoubleField(fit, a0, coef_r.at<double>(0, 0));
env->SetDoubleField(fit, a1, coef_r.at<double>(1, 0));
env->SetDoubleField(fit, a2, coef_r.at<double>(2, 0));
env->SetDoubleField(fit, a3, coef_r.at<double>(3, 0));
env->SetDoubleField(fit, a4, coef_r.at<double>(4, 0));
env->SetDoubleField(fit, a5, coef_r.at<double>(5, 0));
env->SetDoubleField(fit, b0, coef_c.at<double>(0, 0));
env->SetDoubleField(fit, b1, coef_c.at<double>(1, 0));
env->SetDoubleField(fit, b2, coef_c.at<double>(2, 0));
env->SetDoubleField(fit, b3, coef_c.at<double>(3, 0));
env->SetDoubleField(fit, b4, coef_c.at<double>(4, 0));
env->SetDoubleField(fit, b5, coef_c.at<double>(5, 0));
return fit;
}
/** @brief 根据偏移量拟合系数插值得到配准后的SAR图像
@param lineSize 每行元素个数
@param real 实部数据
@param imag 虚部数据
@param center 子块中心点坐标
@param fit 12个偏移量拟合系数
@param overlapSize 瓦片四周重叠部分长度
@return 配准后的SAR复图像(实部为前一半数据,虚部为后一半数据)
*/
JNIEXPORT jshortArray JNICALL Java_com_htzs_insar_jni_Registration_registration
(JNIEnv* env, jclass job, jint lineSize, jshortArray real, jshortArray imag, jobject center, jobject fit, jint overlapSize)
{
jint num = env->GetArrayLength(real);
jint rows = num / lineSize;
jint cols = lineSize;
ComplexMat slave(rows, lineSize);
slave.convertTo(slave, CV_16S);
jshort* data = env->GetShortArrayElements(real, NULL);
memcpy(slave.re.data, data, sizeof(short) * num);
env->ReleaseShortArrayElements(real, data, 0);
data = env->GetShortArrayElements(imag, NULL);
memcpy(slave.im.data, data, sizeof(short) * num);
env->ReleaseShortArrayElements(imag, data, 0);
jclass Point = env->FindClass(Pointclasspath);
jfieldID row_ID = env->GetFieldID(Point, "row", "D");
jfieldID col_ID = env->GetFieldID(Point, "col", "D");
double center_rows, center_cols;
center_rows = env->GetDoubleField(center, row_ID);
center_cols = env->GetDoubleField(center, col_ID);
int row_start = (int)round(center_rows - (double)rows / 2.0);
int col_start = (int)round(center_cols - (double)cols / 2.0);
jclass Fit = env->FindClass(Fitclasspath);
jfieldID a0 = env->GetFieldID(Fit, "a0", "D");
jfieldID a1 = env->GetFieldID(Fit, "a1", "D");
jfieldID a2 = env->GetFieldID(Fit, "a2", "D");
jfieldID a3 = env->GetFieldID(Fit, "a3", "D");
jfieldID a4 = env->GetFieldID(Fit, "a4", "D");
jfieldID a5 = env->GetFieldID(Fit, "a5", "D");
jfieldID b0 = env->GetFieldID(Fit, "b0", "D");
jfieldID b1 = env->GetFieldID(Fit, "b1", "D");
jfieldID b2 = env->GetFieldID(Fit, "b2", "D");
jfieldID b3 = env->GetFieldID(Fit, "b3", "D");
jfieldID b4 = env->GetFieldID(Fit, "b4", "D");
jfieldID b5 = env->GetFieldID(Fit, "b5", "D");
Mat coef_r(6, 1, CV_64F), coef_c(6, 1, CV_64F);
coef_r.at<double>(0, 0) = env->GetDoubleField(fit, a0);
coef_r.at<double>(1, 0) = env->GetDoubleField(fit, a1);
coef_r.at<double>(2, 0) = env->GetDoubleField(fit, a2);
coef_r.at<double>(3, 0) = env->GetDoubleField(fit, a3);
coef_r.at<double>(4, 0) = env->GetDoubleField(fit, a4);
coef_r.at<double>(5, 0) = env->GetDoubleField(fit, a5);
coef_c.at<double>(0, 0) = env->GetDoubleField(fit, b0);
coef_c.at<double>(1, 0) = env->GetDoubleField(fit, b1);
coef_c.at<double>(2, 0) = env->GetDoubleField(fit, b2);
coef_c.at<double>(3, 0) = env->GetDoubleField(fit, b3);
coef_c.at<double>(4, 0) = env->GetDoubleField(fit, b4);
coef_c.at<double>(5, 0) = env->GetDoubleField(fit, b5);
ComplexMat slave_tmp;
slave_tmp = slave;
#pragma omp parallel for schedule(guided)
for (int i = overlapSize; i < rows - overlapSize; i++)
{
double x, y, ii, jj; Mat tmp(1, 6, CV_64F); Mat result;
int mm, nn, mm1, nn1;
double offset_rows, offset_cols, upper, lower;
for (int j = overlapSize; j < cols - overlapSize; j++)
{
x = (double)j + (double)col_start;
y = (double)i + (double)row_start;
ii = (double)i; jj = (double)j;
tmp.at<double>(0, 0) = 1.0;
tmp.at<double>(0, 1) = x;
tmp.at<double>(0, 2) = y;
tmp.at<double>(0, 3) = x * y;
tmp.at<double>(0, 4) = x * x;
tmp.at<double>(0, 5) = y * y;
result = tmp * coef_r;
offset_rows = result.at<double>(0, 0);
result = tmp * coef_c;
offset_cols = result.at<double>(0, 0);
ii += offset_rows;
jj += offset_cols;
mm = (int)floor(ii); nn = (int)floor(jj);
if (mm < 0 || nn < 0 || mm > rows - 1 || nn > cols - 1)
{
slave_tmp.re.at<short>(i, j) = 0.0;
slave_tmp.im.at<short>(i, j) = 0.0;
}
else
{
mm1 = mm + 1; nn1 = nn + 1;
mm1 = mm1 >= rows - 1 ? rows - 1 : mm1;
nn1 = nn1 >= cols - 1 ? cols - 1 : nn1;
//实部插值
upper = slave.re.at<short>(mm, nn) + double(slave.re.at<short>(mm, nn1) - slave.re.at<short>(mm, nn)) * (jj - (double)nn);
lower = slave.re.at<short>(mm1, nn) + double(slave.re.at<short>(mm1, nn1) - slave.re.at<short>(mm1, nn)) * (jj - (double)nn);
slave_tmp.re.at<short>(i, j) = upper + (lower - upper) * (ii - (double)mm);
//虚部插值
upper = slave.im.at<short>(mm, nn) + double(slave.im.at<short>(mm, nn1) - slave.im.at<short>(mm, nn)) * (jj - (double)nn);
lower = slave.im.at<short>(mm1, nn) + double(slave.im.at<short>(mm1, nn1) - slave.im.at<short>(mm1, nn)) * (jj - (double)nn);
slave_tmp.im.at<short>(i, j) = upper + (lower - upper) * (ii - (double)mm);
}
}
}
slave = slave_tmp(Range(overlapSize, rows - overlapSize), Range(overlapSize, cols - overlapSize));
int size = slave.GetCols() * slave.GetRows();
jshortArray arr = env->NewShortArray(size * 2);
env->SetShortArrayRegion(arr, 0, size, (short*)slave.re.data);
env->SetShortArrayRegion(arr, size, size, (short*)slave.im.data);
return arr;
}
5.2:ComplexMat.cpp
#include"ComplexMat.h"
using InSAR::ComplexMat;
ComplexMat::ComplexMat()
{
Mat tmp = Mat::zeros(1, 1, CV_64F);
tmp.copyTo(this->re);
tmp.copyTo(this->im);
}
ComplexMat::ComplexMat(Mat& re, Mat& im)
{
re.copyTo(this->re);
im.copyTo(this->im);
}
ComplexMat::ComplexMat(int rows, int cols)
{
if (rows > 0 && cols > 0)
{
Mat tmp = Mat::zeros(rows, cols, CV_64F);
tmp.copyTo(this->im);
tmp.copyTo(this->re);
}
}
ComplexMat::ComplexMat(const ComplexMat& b)
{
b.re.copyTo(this->re);
b.im.copyTo(this->im);
}
ComplexMat::~ComplexMat()
{
}
int ComplexMat::type() const
{
if (re.type() != im.type()) return -1;
return this->re.type();
}
int ComplexMat::Mul(const ComplexMat& Src, ComplexMat& Dst, bool bConj) const
{
ComplexMat result;
if (this->GetRows() < 1 ||
this->GetCols() < 1 ||
Src.GetRows() < 1 ||
Src.GetCols() < 1 ||
this->GetCols() != Src.GetCols() ||
this->GetRows() != Src.GetRows() ||
this->type() != Src.type())
{
fprintf(stderr, "ComplexMat::Mul(): input check failed!\n\n");
return -1;
}
if (bConj)
{
result.re = this->re.mul(Src.re) + this->im.mul(Src.im);
result.im = Src.re.mul(this->im) - this->re.mul(Src.im);
}
else
{
result.re = this->re.mul(Src.re) - this->im.mul(Src.im);
result.im = Src.re.mul(this->im) + this->re.mul(Src.im);
}
Dst.SetRe(result.re);
Dst.SetIm(result.im);
return 0;
}
ComplexMat ComplexMat::operator*(const ComplexMat& b) const
{
ComplexMat result;
if (this->GetRows() < 1 ||
this->GetCols() < 1 ||
b.GetRows() < 1 ||
b.GetCols() < 1 ||
(this->GetCols() != b.GetCols()) && b.GetCols() != 1 ||
(this->GetRows() != b.GetRows()) && b.GetRows() != 1 ||
this->type() != b.type())
{
fprintf(stderr, "ComplexMat::Mul(): input check failed!\n\n");
return ComplexMat();
}
if (b.GetCols() == 1 && b.GetRows() == 1)
{
result.re = this->re * b.re.at<double>(0, 0) - this->im * b.im.at<double>(0, 0);
result.im = this->im * b.re.at<double>(0, 0) + this->re * b.im.at<double>(0, 0);
}
else
{
result.re = this->re.mul(b.re) - this->im.mul(b.im);
result.im = b.re.mul(this->im) + this->re.mul(b.im);
}
return result;
}
ComplexMat ComplexMat::operator*(const Mat& a) const
{
if (a.cols != this->GetCols() ||
a.rows != this->GetRows() ||
a.type() != this->type() ||
a.channels() != 1)
{
fprintf(stderr, "ComplexMat::operator*(const Mat& a): input check failed!\n\n");
return ComplexMat();
}
Mat out_re, out_im;
ComplexMat out;
out_re = this->re.mul(a);
out_im = this->im.mul(a);
out.SetRe(out_re);
out.SetIm(out_im);
return out;
}
ComplexMat ComplexMat::operator*(const double& a) const
{
Mat out_re, out_im;
ComplexMat out;
out_re = this->re * a;
out_im = this->im * a;
out.SetRe(out_re);
out.SetIm(out_im);
return out;
}
ComplexMat ComplexMat::operator()(cv::Range _rowRange, cv::Range _colRange) const
{
if (_rowRange.start < 0 ||
_rowRange.end > this->GetRows() ||
_colRange.start < 0 ||
_colRange.end > this->GetCols())
{
fprintf(stderr, "ComplexMat::operator()(cv::Range _rowRange, cv::Range _colRange): \n Range exceeds legal value!\n\n");
return ComplexMat();
}
ComplexMat out;
this->re(cv::Range(_rowRange.start, _rowRange.end), cv::Range(_colRange.start, _colRange.end)).copyTo(out.re);
this->im(cv::Range(_rowRange.start, _rowRange.end), cv::Range(_colRange.start, _colRange.end)).copyTo(out.im);
return out;
}
int ComplexMat::SetValue(cv::Range _rowRange, cv::Range _colRange, ComplexMat& src)
{
if ((_rowRange.end - _rowRange.start) != src.GetRows() ||
(_colRange.end - _colRange.start) != src.GetCols() ||
_rowRange.start < 0 ||
_rowRange.end > this->GetRows() ||
_colRange.start < 0 ||
_colRange.end > this->GetCols() ||
src.type() != this->type() ||
(src.type() != CV_64F && src.type() != CV_16S)
)
{
fprintf(stderr, "ComplexMat::SetValue(): input check failed!\n\n");
return -1;
}
if (src.type() == CV_64F)
{
for (int i = _rowRange.start; i < _rowRange.end; i++)
{
for (int j = _colRange.start; j < _colRange.end; j++)
{
this->re.at<double>(i, j) = src.re.at<double>(i - _rowRange.start, j - _colRange.start);
this->im.at<double>(i, j) = src.im.at<double>(i - _rowRange.start, j - _colRange.start);
}
}
}
if (src.type() == CV_16S)
{
for (int i = _rowRange.start; i < _rowRange.end; i++)
{
for (int j = _colRange.start; j < _colRange.end; j++)
{
this->re.at<short>(i, j) = src.re.at<short>(i - _rowRange.start, j - _colRange.start);
this->im.at<short>(i, j) = src.im.at<short>(i - _rowRange.start, j - _colRange.start);
}
}
}
return 0;
}
Mat ComplexMat::GetIm() const
{
return this->im;
}
Mat ComplexMat::GetMod() const
{
Mat tmp;
magnitude(this->re, this->im, tmp);
return tmp;
}
Mat ComplexMat::GetPhase()
{
int nr = this->GetRows();
int nc = this->GetCols();
if (nr < 1 || nc < 1)
{
return Mat::zeros(1, 1, CV_64F);
}
Mat phase(nr, nc, CV_64F);
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
for (int j = 0; j < nc; j++)
{
phase.at <double>(i, j) = atan2(this->im.at<double>(i, j), this->re.at<double>(i, j));
}
}
return phase;
}
Mat ComplexMat::GetRe() const
{
return this->re;
}
void ComplexMat::SetIm(Mat& im)
{
im.copyTo(this->im);
}
void ComplexMat::SetRe(Mat& re)
{
re.copyTo(this->re);
}
int ComplexMat::GetCols() const
{
if (re.cols != im.cols) return -1;
return this->re.cols;
}
int ComplexMat::GetRows() const
{
if (re.rows != im.rows) return -1;
return this->re.rows;
}
ComplexMat ComplexMat::operator+(const ComplexMat& b) const
{
if (this->GetCols() != b.GetCols() ||
b.GetRows() != b.GetRows() ||
this->type() != b.type() ||
this->GetCols() < 1 ||
this->GetRows() < 1
)
{
fprintf(stderr, "ComplexMat operator+: input check failed!\n\n");
return *this;
}
ComplexMat out;
Mat out_re, out_im;
out_re = this->re + b.re;
out_im = this->im + b.im;
out.SetIm(out_im);
out.SetRe(out_re);
return out;
}
ComplexMat ComplexMat::operator=(const ComplexMat& b)
{
b.re.copyTo(this->re);
b.im.copyTo(this->im);
return *this;
}
ComplexMat ComplexMat::sum(int dim) const
{
ComplexMat out;
Mat re, im;
int nr = this->GetRows();
int nc = this->GetCols();
if (nr < 0 || nc < 0)
{
fprintf(stderr, "ComplexMat::sum(): rows or cols < 0!\n\n");
return ComplexMat();
}
if (dim == 1)
{
re = Mat::zeros(nr, 1, CV_64F);
im = Mat::zeros(nr, 1, CV_64F);
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
double tmp_re, tmp_im;
tmp_re = 0.0; tmp_im = 0.0;
for (int j = 0; j < nc; j++)
{
tmp_re += this->re.at<double>(i, j);
tmp_im += this->im.at<double>(i, j);
}
re.at<double>(i, 0) = tmp_re;
im.at<double>(i, 0) = tmp_im;
}
}
else
{
re = Mat::zeros(1, nc, CV_64F);
im = Mat::zeros(1, nc, CV_64F);
#pragma omp parallel for schedule(guided)
for (int j = 0; j < nc; j++)
{
double tmp_re, tmp_im;
tmp_re = 0.0; tmp_im = 0.0;
for (int i = 0; i < nr; i++)
{
tmp_re += this->re.at<double>(i, j);
tmp_im += this->im.at<double>(i, j);
}
re.at<double>(0, j) = tmp_re;
im.at<double>(0, j) = tmp_im;
}
}
out.SetRe(re);
out.SetIm(im);
return out;
}
ComplexMat ComplexMat::conj() const
{
ComplexMat out;
Mat im, re;
this->re.copyTo(re);
this->im.copyTo(im);
im = -im;
out.SetRe(re);
out.SetIm(im);
return out;
}
int ComplexMat::countNonzero() const
{
if (this->re.rows == 0 ||
this->im.rows == 0 ||
this->re.cols == 0 ||
this->im.cols == 0
)
{
return 0;
}
int count = 0;
int nr = GetRows();
int nc = GetCols();
for (int i = 0; i < nr; i++)
{
for (int j = 0; j < nc; j++)
{
if (fabs(this->re.at<double>(i, j)) > DBL_EPSILON || fabs(this->im.at<double>(i, j)) > DBL_EPSILON)
{
count++;
}
}
}
return count;
}
bool ComplexMat::isempty() const
{
if (this->GetRows() < 1 || this->GetCols() < 1) return true;
return false;
}
void ComplexMat::convertTo(ComplexMat& out, int type) const
{
if (this->type() == type)
{
out = *this;
}
else
{
this->re.convertTo(out.re, type);
this->im.convertTo(out.im, type);
}
}
5.3:Registration.cpp
#include<string.h>
#include<math.h>
#include"Registration.h"
using namespace cv;
using namespace InSAR;
inline bool return_check(int ret, const char* detail_info, const char* error_head)
{
if (ret < 0)
{
fprintf(stderr, "%s %s\n\n", error_head, detail_info);
return true;
}
else
{
return false;
}
}
inline bool parallel_check(volatile bool parallel_flag, const char* detail_info, const char* parallel_error_head)
{
if (!parallel_flag)
{
fprintf(stderr, "%s %s\n\n", parallel_error_head, detail_info);
return true;
}
else
{
return false;
}
}
inline bool parallel_flag_change(volatile bool parallel_flag, int ret)
{
if (ret < 0)
{
parallel_flag = false;
return true;
}
else
{
return false;
}
}
Registration::Registration()
{
memset(this->error_head, 0, 256);
memset(this->parallel_error_head, 0, 256);
strcpy(this->error_head, "REGISTRATION_DLL_ERROR: error happens when using ");
strcpy(this->parallel_error_head, "REGISTRATION_DLL_ERROR: error happens when using parallel computing in function: ");
}
Registration::~Registration()
{
}
int Registration::fft2(Mat& Src, Mat& Dst)
{
if (Src.rows < 1 ||
Src.cols < 1 ||
Src.channels() != 1 ||
Src.type() != CV_64F)
{
fprintf(stderr, "fft2(): input check failed!\n\n");
return -1;
}
Mat planes[] = { Mat_<double>(Src), Mat::zeros(Src.size(), CV_64F) };
Mat complexImg;
merge(planes, 2, complexImg);
dft(complexImg, Dst);
return 0;
}
int Registration::fftshift2(Mat& matrix)
{
if (matrix.rows < 2 ||
matrix.cols < 2 ||
matrix.channels() != 1)
{
fprintf(stderr, "fftshift2(): input check failed!\n\n");
return -1;
}
matrix = matrix(Rect(0, 0, matrix.cols & -2, matrix.rows & -2));
int cx = matrix.cols / 2;
int cy = matrix.rows / 2;
Mat tmp;
Mat q0(matrix, Rect(0, 0, cx, cy));
Mat q1(matrix, Rect(cx, 0, cx, cy));
Mat q2(matrix, Rect(0, cy, cx, cy));
Mat q3(matrix, Rect(cx, cy, cx, cy));
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
return 0;
}
int Registration::real_coherent(ComplexMat& Master, ComplexMat& Slave, int* offset_row, int* offset_col)
{
if (Master.GetRows() < 1 ||
Master.GetCols() < 1 ||
Master.GetRows() != Slave.GetRows() ||
Master.GetCols() != Slave.GetCols())
{
fprintf(stderr, "real_coherent(): input check failed!\n\n");
return -1;
}
int ret;
Mat img1;
Mat img2;
img1 = Master.GetMod();
img2 = Slave.GetMod();
Mat im1fft;
Mat im2fft;
ret = fft2(img1, im1fft);
if (return_check(ret, "fft2(*, *)", error_head)) return -1;
ret = fft2(img2, im2fft);
if (return_check(ret, "fft2(*, *)", error_head)) return -1;
Mat spectrum;
mulSpectrums(im1fft, im2fft, spectrum, 0, true);
Mat result;
idft(spectrum, result, DFT_REAL_OUTPUT);//需要显示图像时可以用DFT_SCALE
ret = fftshift2(result);
if (return_check(ret, "fftshift2(*)", error_head)) return -1;
normalize(result, result, 0, 1, NORM_MINMAX);
int r = result.rows / 2;
int c = result.cols / 2;
Point peak_loc;
minMaxLoc(result, NULL, NULL, NULL, &peak_loc);
*offset_row = r - peak_loc.y;
*offset_col = c - peak_loc.x;
return 0;
}
int Registration::registration_pixel(ComplexMat& Master, ComplexMat& Slave, int* move_r, int* move_c)
{
if (Master.GetRows() < 1 ||
Master.GetCols() < 1 ||
Master.GetRows() != Slave.GetRows() ||
Master.GetCols() != Slave.GetCols())
{
fprintf(stderr, "registration_pixel(): input check failed!\n\n");
return -1;
}
int offset_rows, offset_cols, ret;
offset_cols = 0;
offset_rows = 0;
ret = real_coherent(Master, Slave, &offset_rows, &offset_cols);//相关函数求取偏移量
if (move_r)*move_r = offset_rows;
if (move_c)*move_c = offset_cols;
if (return_check(ret, "real_coherent(*, *, *, *)", error_head)) return -1;
////搬移与裁剪
//行偏移(竖直移动)
ComplexMat image_master_mid;
ComplexMat image_slave_mid;
int nr = Slave.GetRows();
int nc = Slave.GetCols();
//////////////////////////////检查粗配准偏移量是否超过图像大小////////////////////////////////////
if ((offset_rows > 0 ? offset_rows : -offset_rows) >= nr ||
(offset_cols > 0 ? offset_cols : -offset_cols) >= nc)
{
fprintf(stderr, "registration_pixel(): registration offset exceed size of images!\n\n");
return -1;
}
if (offset_rows >= 0)
{
//实部
Slave.re(Range(offset_rows, nr), Range(0, nc)).copyTo(image_slave_mid.re);//辅图像向上搬移
Master.re(Range(0, nr - offset_rows), Range(0, nc)).copyTo(image_master_mid.re);//裁剪主图像
//虚部
Slave.im(Range(offset_rows, nr), Range(0, nc)).copyTo(image_slave_mid.im);//辅图像向上搬移
Master.im(Range(0, nr - offset_rows), Range(0, nc)).copyTo(image_master_mid.im);//裁剪
}
else
{
//实部
Slave.re(Range(0, nr + offset_rows), Range(0, nc)).copyTo(image_slave_mid.re);//辅图像向下搬移
Master.re(Range(-offset_rows, nr), Range(0, nc)).copyTo(image_master_mid.re);//裁剪
//虚部
Slave.im(Range(0, nr + offset_rows), Range(0, nc)).copyTo(image_slave_mid.im);//辅图像向下搬移
Master.im(Range(-offset_rows, nr), Range(0, nc)).copyTo(image_master_mid.im);//裁剪
}
ComplexMat image_master_regis;
ComplexMat image_slave_regis;
int nr1 = image_master_mid.re.rows;
int nc1 = image_master_mid.re.cols;
//列偏移(水平移动)
if (offset_cols >= 0)//辅图像向左搬移
{
//实部
image_slave_mid.re(Range(0, nr1), Range(offset_cols, nc1)).copyTo(image_slave_regis.re);
image_master_mid.re(Range(0, nr1), Range(0, nc1 - offset_cols)).copyTo(image_master_regis.re);
//虚部
image_slave_mid.im(Range(0, nr1), Range(offset_cols, nc1)).copyTo(image_slave_regis.im);
image_master_mid.im(Range(0, nr1), Range(0, nc1 - offset_cols)).copyTo(image_master_regis.im);
}
else//辅图像向右搬移
{
//实部
image_slave_mid.re(Range(0, nr1), Range(0, nc1 + offset_cols)).copyTo(image_slave_regis.re);
image_master_mid.re(Range(0, nr1), Range(-offset_cols, nc1)).copyTo(image_master_regis.re);
//虚部
image_slave_mid.im(Range(0, nr1), Range(0, nc1 + offset_cols)).copyTo(image_slave_regis.im);
image_master_mid.im(Range(0, nr1), Range(-offset_cols, nc1)).copyTo(image_master_regis.im);
}
Master.re = image_master_regis.re;
Master.im = image_master_regis.im;
Slave.re = image_slave_regis.re;
Slave.im = image_slave_regis.im;
return 0;
}
int Registration::interp_paddingzero(ComplexMat& InputMatrix, ComplexMat& OutputMatrix, int interp_times)
{
if (InputMatrix.GetRows() < 2 ||
InputMatrix.GetCols() < 2 ||
interp_times < 2)
{
fprintf(stderr, "interp_paddingzero(): input check failed!\n\n");
return -1;
}
int nr = InputMatrix.GetRows();
int nc = InputMatrix.GetCols();
OutputMatrix.re = Mat::zeros(interp_times * nr, interp_times * nc, CV_64F);
OutputMatrix.im = Mat::zeros(interp_times * nr, interp_times * nc, CV_64F);
Mat re, im;
InputMatrix.re.copyTo(re);
InputMatrix.im.copyTo(im);
Mat planes[] = { Mat_<double>(re), Mat_<double>(im) };
Mat complexImg;
merge(planes, 2, complexImg);
dft(complexImg, complexImg, DFT_COMPLEX_OUTPUT);
split(complexImg, planes);
planes[0](Range(0, nr / 2), Range(0, nc / 2)).copyTo(OutputMatrix.re(Range(0, nr / 2), Range(0, nc / 2)));
planes[1](Range(0, nr / 2), Range(0, nc / 2)).copyTo(OutputMatrix.im(Range(0, nr / 2), Range(0, nc / 2)));
planes[0](Range(nr / 2, nr), Range(0, nc / 2)).copyTo(OutputMatrix.re(Range(nr * interp_times - nr / 2, nr * interp_times), Range(0, nc / 2)));
planes[1](Range(nr / 2, nr), Range(0, nc / 2)).copyTo(OutputMatrix.im(Range(nr * interp_times - nr / 2, nr * interp_times), Range(0, nc / 2)));
planes[0](Range(0, nr / 2), Range(nc / 2, nc)).copyTo(OutputMatrix.re(Range(0, nr / 2), Range(nc * interp_times - nc / 2, nc * interp_times)));
planes[1](Range(0, nr / 2), Range(nc / 2, nc)).copyTo(OutputMatrix.im(Range(0, nr / 2), Range(nc * interp_times - nc / 2, nc * interp_times)));
planes[0](Range(nr / 2, nr), Range(nc / 2, nc)).copyTo(OutputMatrix.re(Range(nr * interp_times - nr / 2, nr * interp_times), Range(nc * interp_times - nc / 2, nc * interp_times)));
planes[1](Range(nr / 2, nr), Range(nc / 2, nc)).copyTo(OutputMatrix.im(Range(nr * interp_times - nr / 2, nr * interp_times), Range(nc * interp_times - nc / 2, nc * interp_times)));
Mat planes1[] = { Mat_<double>(OutputMatrix.re), Mat_<double>(OutputMatrix.im) };
merge(planes1, 2, complexImg);
idft(complexImg, complexImg);
split(complexImg, planes1);
OutputMatrix.re = planes1[0];
OutputMatrix.im = planes1[1];
return 0;
}
int Registration::interp_cubic(ComplexMat& InputMatrix, ComplexMat& OutputMatrix, double offset_row, double offset_col)
{
int nr = InputMatrix.GetRows();
int nc = InputMatrix.GetCols();//输入矩阵尺寸
if (nr < 2 || nc < 2 || InputMatrix.re.type() != CV_64F)
{
fprintf(stderr, "interp_cubic(): input check failed!\n\n");
return -1;
}
ComplexMat new_image_slave;
new_image_slave.re = Mat::zeros(nr + 3, nc + 3, CV_64F);
new_image_slave.im = Mat::zeros(nr + 3, nc + 3, CV_64F);
//扩充矩阵(扩展三行三列)
//实部
InputMatrix.re(Range(0, 1), Range(0, 1)).copyTo(new_image_slave.re(Range(0, 1), Range(0, 1)));
InputMatrix.re(Range(0, 1), Range(0, nc)).copyTo(new_image_slave.re(Range(0, 1), Range(1, nc + 1)));
InputMatrix.re(Range(0, 1), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(0, 1), Range(nc + 1, nc + 2)));
InputMatrix.re(Range(0, 1), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(0, 1), Range(nc + 2, nc + 3)));
InputMatrix.re(Range(0, nr), Range(0, 1)).copyTo(new_image_slave.re(Range(1, nr + 1), Range(0, 1)));
InputMatrix.re(Range(nr - 1, nr), Range(0, 1)).copyTo(new_image_slave.re(Range(nr + 1, nr + 2), Range(0, 1)));
InputMatrix.re(Range(nr - 1, nr), Range(0, 1)).copyTo(new_image_slave.re(Range(nr + 2, nr + 3), Range(0, 1)));
InputMatrix.re(Range(nr - 1, nr), Range(0, nc)).copyTo(new_image_slave.re(Range(nr + 1, nr + 2), Range(1, nc + 1)));
InputMatrix.re(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(nr + 1, nr + 2), Range(nc + 2, nc + 3)));
new_image_slave.re(Range(nr + 1, nr + 2), Range(0, nc + 3)).copyTo(new_image_slave.re(Range(nr + 2, nr + 3), Range(0, nc + 3)));
InputMatrix.re(Range(0, nr), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(1, nr + 1), Range(nc + 1, nc + 2)));
InputMatrix.re(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(nr + 2, nr + 3), Range(nc + 1, nc + 2)));
InputMatrix.re(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(nr + 2, nr + 3), Range(nc + 2, nc + 3)));
new_image_slave.re(Range(0, nr + 3), Range(nc + 1, nc + 2)).copyTo(new_image_slave.re(Range(0, nr + 3), Range(nc + 2, nc + 3)));
InputMatrix.re(Range(0, nr), Range(0, nc)).copyTo(new_image_slave.re(Range(1, nr + 1), Range(1, nc + 1)));
//虚部
InputMatrix.im(Range(0, 1), Range(0, 1)).copyTo(new_image_slave.im(Range(0, 1), Range(0, 1)));
InputMatrix.im(Range(0, 1), Range(0, nc)).copyTo(new_image_slave.im(Range(0, 1), Range(1, nc + 1)));
InputMatrix.im(Range(0, 1), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(0, 1), Range(nc + 1, nc + 2)));
InputMatrix.im(Range(0, 1), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(0, 1), Range(nc + 2, nc + 3)));
InputMatrix.im(Range(0, nr), Range(0, 1)).copyTo(new_image_slave.im(Range(1, nr + 1), Range(0, 1)));
InputMatrix.im(Range(nr - 1, nr), Range(0, 1)).copyTo(new_image_slave.im(Range(nr + 1, nr + 2), Range(0, 1)));
InputMatrix.im(Range(nr - 1, nr), Range(0, 1)).copyTo(new_image_slave.im(Range(nr + 2, nr + 3), Range(0, 1)));
InputMatrix.im(Range(nr - 1, nr), Range(0, nc)).copyTo(new_image_slave.im(Range(nr + 1, nr + 2), Range(1, nc + 1)));
InputMatrix.im(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(nr + 1, nr + 2), Range(nc + 2, nc + 3)));
new_image_slave.im(Range(nr + 1, nr + 2), Range(0, nc + 3)).copyTo(new_image_slave.im(Range(nr + 2, nr + 3), Range(0, nc + 3)));
InputMatrix.im(Range(0, nr), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(1, nr + 1), Range(nc + 1, nc + 2)));
InputMatrix.im(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(nr + 2, nr + 3), Range(nc + 1, nc + 2)));
InputMatrix.im(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(nr + 2, nr + 3), Range(nc + 2, nc + 3)));
new_image_slave.im(Range(0, nr + 3), Range(nc + 1, nc + 2)).copyTo(new_image_slave.im(Range(0, nr + 3), Range(nc + 2, nc + 3)));
//内点
InputMatrix.im(Range(0, nr), Range(0, nc)).copyTo(new_image_slave.im(Range(1, nr + 1), Range(1, nc + 1)));
//行权
double row_weight[4];
row_weight[0] = WeightCalculation(1.0 + offset_row);
row_weight[1] = WeightCalculation(offset_row);
row_weight[2] = WeightCalculation(1.0 - offset_row);
row_weight[3] = WeightCalculation(2.0 - offset_row);
Mat Row_weight(4, 1, CV_64F, row_weight);
//列权
double col_weight[4];
col_weight[0] = WeightCalculation(1.0 + offset_col);
col_weight[1] = WeightCalculation(offset_col);
col_weight[2] = WeightCalculation(1.0 - offset_col);
col_weight[3] = WeightCalculation(2.0 - offset_col);
Mat Col_weight(1, 4, CV_64F, col_weight);
//权矩阵
Mat Weight = Row_weight * Col_weight;
//实部虚部分别插值
Mat image_slave_regis_re = Mat::zeros(nr, nc, CV_64F);
Mat image_slave_regis_im = Mat::zeros(nr, nc, CV_64F);
double temp;
#pragma omp parallel for schedule(guided) \
private(temp)
for (int i = 0; i <= nr - 1; i++)
{
for (int j = 0; j <= nc - 1; j++)
{
temp = new_image_slave.re(Range(i, i + 4), Range(j, j + 4)).dot(Weight);
image_slave_regis_re.at<double>(i, j) = temp;
temp = new_image_slave.im(Range(i, i + 4), Range(j, j + 4)).dot(Weight);
image_slave_regis_im.at<double>(i, j) = temp;
}
}
image_slave_regis_re.copyTo(OutputMatrix.re);
image_slave_regis_im.copyTo(OutputMatrix.im);
return 0;
}
int Registration::interp_cubic(ComplexMat& InputMatrix, ComplexMat& OutputMatrix, Mat& Coefficient)
{
int nr = InputMatrix.GetRows();
int nc = InputMatrix.GetCols();//输入矩阵尺寸
if (nr < 2 || nc < 2 || InputMatrix.re.type() != CV_64F)
{
fprintf(stderr, "interp_cubic(): input check failed!\n\n");
return -1;
}
ComplexMat new_image_slave;
new_image_slave.re = Mat::zeros(nr + 3, nc + 3, CV_64F);
new_image_slave.im = Mat::zeros(nr + 3, nc + 3, CV_64F);
//扩充矩阵(扩展三行三列)
//实部
InputMatrix.re(Range(0, 1), Range(0, 1)).copyTo(new_image_slave.re(Range(0, 1), Range(0, 1)));
InputMatrix.re(Range(0, 1), Range(0, nc)).copyTo(new_image_slave.re(Range(0, 1), Range(1, nc + 1)));
InputMatrix.re(Range(0, 1), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(0, 1), Range(nc + 1, nc + 2)));
InputMatrix.re(Range(0, 1), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(0, 1), Range(nc + 2, nc + 3)));
InputMatrix.re(Range(0, nr), Range(0, 1)).copyTo(new_image_slave.re(Range(1, nr + 1), Range(0, 1)));
InputMatrix.re(Range(nr - 1, nr), Range(0, 1)).copyTo(new_image_slave.re(Range(nr + 1, nr + 2), Range(0, 1)));
InputMatrix.re(Range(nr - 1, nr), Range(0, 1)).copyTo(new_image_slave.re(Range(nr + 2, nr + 3), Range(0, 1)));
InputMatrix.re(Range(nr - 1, nr), Range(0, nc)).copyTo(new_image_slave.re(Range(nr + 1, nr + 2), Range(1, nc + 1)));
InputMatrix.re(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(nr + 1, nr + 2), Range(nc + 2, nc + 3)));
new_image_slave.re(Range(nr + 1, nr + 2), Range(0, nc + 3)).copyTo(new_image_slave.re(Range(nr + 2, nr + 3), Range(0, nc + 3)));
InputMatrix.re(Range(0, nr), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(1, nr + 1), Range(nc + 1, nc + 2)));
InputMatrix.re(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(nr + 2, nr + 3), Range(nc + 1, nc + 2)));
InputMatrix.re(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.re(Range(nr + 2, nr + 3), Range(nc + 2, nc + 3)));
new_image_slave.re(Range(0, nr + 3), Range(nc + 1, nc + 2)).copyTo(new_image_slave.re(Range(0, nr + 3), Range(nc + 2, nc + 3)));
InputMatrix.re(Range(0, nr), Range(0, nc)).copyTo(new_image_slave.re(Range(1, nr + 1), Range(1, nc + 1)));
//虚部
InputMatrix.im(Range(0, 1), Range(0, 1)).copyTo(new_image_slave.im(Range(0, 1), Range(0, 1)));
InputMatrix.im(Range(0, 1), Range(0, nc)).copyTo(new_image_slave.im(Range(0, 1), Range(1, nc + 1)));
InputMatrix.im(Range(0, 1), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(0, 1), Range(nc + 1, nc + 2)));
InputMatrix.im(Range(0, 1), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(0, 1), Range(nc + 2, nc + 3)));
InputMatrix.im(Range(0, nr), Range(0, 1)).copyTo(new_image_slave.im(Range(1, nr + 1), Range(0, 1)));
InputMatrix.im(Range(nr - 1, nr), Range(0, 1)).copyTo(new_image_slave.im(Range(nr + 1, nr + 2), Range(0, 1)));
InputMatrix.im(Range(nr - 1, nr), Range(0, 1)).copyTo(new_image_slave.im(Range(nr + 2, nr + 3), Range(0, 1)));
InputMatrix.im(Range(nr - 1, nr), Range(0, nc)).copyTo(new_image_slave.im(Range(nr + 1, nr + 2), Range(1, nc + 1)));
InputMatrix.im(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(nr + 1, nr + 2), Range(nc + 2, nc + 3)));
new_image_slave.im(Range(nr + 1, nr + 2), Range(0, nc + 3)).copyTo(new_image_slave.im(Range(nr + 2, nr + 3), Range(0, nc + 3)));
InputMatrix.im(Range(0, nr), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(1, nr + 1), Range(nc + 1, nc + 2)));
InputMatrix.im(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(nr + 2, nr + 3), Range(nc + 1, nc + 2)));
InputMatrix.im(Range(nr - 1, nr), Range(nc - 1, nc)).copyTo(new_image_slave.im(Range(nr + 2, nr + 3), Range(nc + 2, nc + 3)));
new_image_slave.im(Range(0, nr + 3), Range(nc + 1, nc + 2)).copyTo(new_image_slave.im(Range(0, nr + 3), Range(nc + 2, nc + 3)));
//内点
InputMatrix.im(Range(0, nr), Range(0, nc)).copyTo(new_image_slave.im(Range(1, nr + 1), Range(1, nc + 1)));
Mat image_slave_regis_re = Mat::zeros(nr, nc, CV_64F);
Mat image_slave_regis_im = Mat::zeros(nr, nc, CV_64F);
int ret;
volatile bool parallel_flag = true;
#pragma omp parallel for schedule(guided) \
private(ret)
for (int i = 0; i <= nr - 1; i++)
{
if (!parallel_flag) continue;
for (int j = 0; j <= nc - 1; j++)
{
if (!parallel_flag) continue;
double temp, offset_row, offset_col;
Mat Row_weight = Mat::zeros(4, 1, CV_64F);
Mat Col_weight = Mat::zeros(1, 4, CV_64F);
offset_row = 0;
offset_col = 0;
ret = every_subpixel_move(i + 1, j + 1, Coefficient, &offset_row, &offset_col);
if (ret < 0)
{
parallel_flag = false;
continue;
}
Row_weight.at<double>(0, 0) = WeightCalculation(offset_row + 1.0);
Row_weight.at<double>(1, 0) = WeightCalculation(offset_row);
Row_weight.at<double>(2, 0) = WeightCalculation(1.0 - offset_row);
Row_weight.at<double>(3, 0) = WeightCalculation(2.0 - offset_row);
Col_weight.at<double>(0, 0) = WeightCalculation(1.0 + offset_col);
Col_weight.at<double>(0, 1) = WeightCalculation(offset_col);
Col_weight.at<double>(0, 2) = WeightCalculation(1.0 - offset_col);
Col_weight.at<double>(0, 3) = WeightCalculation(2.0 - offset_col);
temp = new_image_slave.re(Range(i, i + 4), Range(j, j + 4)).dot(Row_weight * Col_weight);
image_slave_regis_re.at<double>(i, j) = temp;
temp = new_image_slave.im(Range(i, i + 4), Range(j, j + 4)).dot(Row_weight * Col_weight);
image_slave_regis_im.at<double>(i, j) = temp;
}
}
if (parallel_check(parallel_flag, "interp_cubic()", parallel_error_head)) return -1;
image_slave_regis_re.copyTo(OutputMatrix.re);
image_slave_regis_im.copyTo(OutputMatrix.im);
return 0;
}
double Registration::WeightCalculation(double offset)
{
double weight = 0;
if (offset > 0)
{
offset = offset;
}
else
{
offset = -offset;
}
if (offset < 1.0)
{
weight = 1.0 - 2.0 * offset * offset + offset * offset * offset;
}
else if (offset >= 1.0 && offset <= 2.0)
{
weight = 4.0 - 8.0 * offset + 5.0 * offset * offset - offset * offset * offset;
}
else
{
weight = 0.0;
}
return weight;
}
int Registration::registration_subpixel(ComplexMat& Master, ComplexMat& Slave, int blocksize, int interp_times)
{
if (Master.GetRows() < 1 ||
Master.GetCols() < 1 ||
Master.GetRows() != Slave.GetRows() ||
Master.GetCols() != Slave.GetCols() ||
blocksize < 1 ||
interp_times < 1)
{
fprintf(stderr, "%s\n\n", "registration_subpixel(): input check failed!\n\n");
return -1;
}
int nsubr = Master.GetRows() / blocksize; //子块行数
int nsubc = Master.GetCols() / blocksize; //子块列数
int nsub = nsubr * nsubc; //子块总数
if (nsubc < 1 || nsubr < 1)
{
fprintf(stderr, "%s\n\n", "registration_subpixel: subblockszie, nsubc < 1 || nsubr < 1");
return -1;
}
Mat sub_r_offset = Mat::zeros(nsub, 1, CV_64F); //行亚像素偏移量
Mat sub_c_offset = Mat::zeros(nsub, 1, CV_64F); //列亚像素偏移量
Mat m = Mat::zeros(nsub, 1, CV_32S); //子块中心行坐标
Mat n = Mat::zeros(nsub, 1, CV_32S); //子块中心列坐标
Mat indx = Mat::zeros(nsub, 1, CV_32S); //索引
int count = 0;
int ret;
Mat coherence;
Utils util;
volatile bool parallel_flag = true;
#pragma omp parallel for schedule(guided) \
private(ret)
for (int i = 0; i < nsubc; i++)
{
if (!parallel_flag) continue;
for (int j = 0; j < nsubr; j++)
{
if (!parallel_flag) continue;
ComplexMat temp_in_slave, temp_out_slave, temp_in_master, temp_out_master;
int offset_row, offset_col;
//辅图像子块插值
Slave.re(Range(j * blocksize, (j + 1) * blocksize), Range(i * blocksize, (i + 1) * blocksize)).copyTo(temp_in_slave.re);
Slave.im(Range(j * blocksize, (j + 1) * blocksize), Range(i * blocksize, (i + 1) * blocksize)).copyTo(temp_in_slave.im);
//util.cvmat2bin("E:\\zgb1\\InSAR\\InSAR\\bin\\re.bin", temp_in_slave.re);
ret = interp_paddingzero(temp_in_slave, temp_out_slave, interp_times);
if (ret < 0)
{
parallel_flag = false;
continue;
}
//主图像子块插值
Master.re(Range(j * blocksize, (j + 1) * blocksize), Range(i * blocksize, (i + 1) * blocksize)).copyTo(temp_in_master.re);
Master.im(Range(j * blocksize, (j + 1) * blocksize), Range(i * blocksize, (i + 1) * blocksize)).copyTo(temp_in_master.im);
ret = interp_paddingzero(temp_in_master, temp_out_master, interp_times);
if (ret < 0)
{
parallel_flag = false;
continue;
}
//实相关函数求取亚像素偏移量
ret = real_coherent(temp_out_master, temp_out_slave, &offset_row, &offset_col);
if (ret < 0)
{
parallel_flag = false;
continue;
}
double offset_row_sub, offset_col_sub, mean_coh;
//ret = util.real_coherence(temp_out_master, temp_out_slave, coherence);
//if (ret < 0)
//{
// parallel_flag = false;
// continue;
//}
//mean_coh = mean(coherence)[0];
offset_row_sub = double(offset_row) / double(interp_times);
offset_col_sub = double(offset_col) / double(interp_times);
sub_r_offset.at<double>(i * nsubr + j, 0) = offset_row_sub;
sub_c_offset.at<double>(i * nsubr + j, 0) = offset_col_sub;
//子块中心坐标
n.at<int>(i * nsubr + j, 0) = blocksize / 2 + i * blocksize;
m.at<int>(i * nsubr + j, 0) = blocksize / 2 + j * blocksize;
ret = interp_cubic(temp_in_slave, temp_in_slave, sub_r_offset.at<double>(i * nsubr + j, 0), sub_c_offset.at<double>(i * nsubr + j, 0));//子辅图像插值
if (ret < 0)
{
parallel_flag = false;
continue;
}
ret = util.real_coherence(temp_in_master, temp_in_slave, coherence);
if (ret < 0)
{
parallel_flag = false;
continue;
}
if (mean(coherence)[0] > 0.4)
{
indx.at<int>(i * nsubr + j, 0) = 1;
}
}
}
if (parallel_check(parallel_flag, "registration_subpixel()", parallel_error_head)) return -1;
int NoneZero = countNonZero(indx);//非零元素个数
count = 0;
if (NoneZero == 0)
{
fprintf(stderr, "registration_subpixel(): NoneZero == 0\n\n");
return -1;
}
Mat sub_r_offset_sifted = Mat::zeros(NoneZero, 1, CV_64F); //筛选后行亚像素偏移量
Mat sub_c_offset_sifted = Mat::zeros(NoneZero, 1, CV_64F); //筛选后列亚像素偏移量
Mat m_sifted = Mat::zeros(NoneZero, 1, CV_32S); //筛选后子块中心行坐标
Mat n_sifted = Mat::zeros(NoneZero, 1, CV_32S); //筛选后子块中心列坐标
for (int k = 0; k < nsub; k++)
{
if (indx.at<int>(k, 0) > 0)
{
sub_r_offset_sifted.at<double>(count, 0) = sub_r_offset.at<double>(k, 0);
sub_c_offset_sifted.at<double>(count, 0) = sub_c_offset.at<double>(k, 0);
m_sifted.at<int>(count, 0) = m.at<int>(k, 0);
n_sifted.at<int>(count, 0) = n.at<int>(k, 0);
count++;
}
}
Mat para;
ret = all_subpixel_move(m_sifted, n_sifted, sub_r_offset_sifted, sub_c_offset_sifted, para);//拟合辅图像偏移量
//测试
//cout << para << "\n";
//
if (return_check(ret, "all_subpixel_move(*, *, *, *)", error_head)) return -1;
ret = interp_cubic(Slave, Slave, para);
if (return_check(ret, "interp_cubic(*, *, *)", error_head)) return -1;
return 0;
}
int Registration::coregistration_subpixel(ComplexMat& master, ComplexMat& slave, int blocksize, int interp_times)
{
if (master.isempty() ||
slave.GetCols() != master.GetCols() ||
slave.GetRows() != slave.GetRows() ||
blocksize * 5 > (slave.GetCols() < slave.GetRows() ? slave.GetCols() : slave.GetRows()) ||
blocksize < 8 || interp_times < 1
)
{
fprintf(stderr, "coregistration_pixel(): input check failed!\n");
return -1;
}
/*---------------------------------------*/
/* 求取偏移量矩阵 */
/*---------------------------------------*/
Utils util;
int m = (master.GetRows()) / blocksize;
int n = (master.GetCols()) / blocksize;
Mat offset_r = Mat::zeros(m, n, CV_64F); Mat offset_c = Mat::zeros(m, n, CV_64F);
Mat offset_coord_row = Mat::zeros(m, n, CV_64F);
Mat offset_coord_col = Mat::zeros(m, n, CV_64F);
//子块中心坐标
for (int i = 0; i < m; i++)
{
for (int j = 0; j < n; j++)
{
offset_coord_row.at<double>(i, j) = ((double)blocksize) / 2 * (double)(2 * i + 1);
offset_coord_col.at<double>(i, j) = ((double)blocksize) / 2 * (double)(2 * j + 1);
}
}
#pragma omp parallel for schedule(guided)
for (int i = 0; i < m; i++)
{
ComplexMat master_sub, slave_sub, master_sub_interp, slave_sub_interp;
int offset_row, offset_col;
for (int j = 0; j < n; j++)
{
//主图像子块插值
master.re(Range(i * blocksize, (i + 1) * blocksize), Range(j * blocksize, (j + 1) * blocksize)).copyTo(master_sub.re);
master.im(Range(i * blocksize, (i + 1) * blocksize), Range(j * blocksize, (j + 1) * blocksize)).copyTo(master_sub.im);
interp_paddingzero(master_sub, master_sub_interp, interp_times);
//辅图像子块插值
slave.re(Range(i * blocksize, (i + 1) * blocksize), Range(j * blocksize, (j + 1) * blocksize)).copyTo(slave_sub.re);
slave.im(Range(i * blocksize, (i + 1) * blocksize), Range(j * blocksize, (j + 1) * blocksize)).copyTo(slave_sub.im);
interp_paddingzero(slave_sub, slave_sub_interp, interp_times);
//求取偏移量
real_coherent(master_sub_interp, slave_sub_interp, &offset_row, &offset_col);
offset_r.at<double>(i, j) = (double)offset_row / (double)interp_times;
offset_c.at<double>(i, j) = (double)offset_col / (double)interp_times;
}
}
/*---------------------------------------*/
/* 拟合偏移量(将坐标做归一化处理) */
/*---------------------------------------*/
/*
* 拟合公式为 offser_row/offser_col = a0 + a1*x + a2*y + a3*x*y + a4*x*x + a5*y*y + a6*x*x*y + a7*x*y*y + a8*x*x*x + a9*y*y*y
*/
//util.cvmat2bin("E:\\working_dir\\projects\\software\\InSAR\\bin\\offset_r.bin", offset_r);
//util.cvmat2bin("E:\\working_dir\\projects\\software\\InSAR\\bin\\offset_c.bin", offset_c);
//剔除outliers
Mat sentinel = Mat::zeros(m, n, CV_64F);
int ix, iy, count = 0, c = 0; double delta, thresh = 2.0;
for (int i = 0; i < m; i++)
{
for (int j = 0; j < n; j++)
{
count = 0;
//上
ix = j;
iy = i - 1; iy = iy < 0 ? 0 : iy;
delta = fabs(offset_c.at<double>(i, j) - offset_c.at<double>(iy, ix));
delta += fabs(offset_r.at<double>(i, j) - offset_r.at<double>(iy, ix));
if (fabs(delta) >= thresh) count++;
//下
ix = j;
iy = i + 1; iy = iy > m - 1 ? m - 1 : iy;
delta = fabs(offset_c.at<double>(i, j) - offset_c.at<double>(iy, ix));
delta += fabs(offset_r.at<double>(i, j) - offset_r.at<double>(iy, ix));
if (fabs(delta) >= thresh) count++;
//左
ix = j - 1; ix = ix < 0 ? 0 : ix;
iy = i;
delta = fabs(offset_c.at<double>(i, j) - offset_c.at<double>(iy, ix));
delta += fabs(offset_r.at<double>(i, j) - offset_r.at<double>(iy, ix));
if (fabs(delta) >= thresh) count++;
//右
ix = j + 1; ix = ix > n - 1 ? n - 1 : ix;
iy = i;
delta = fabs(offset_c.at<double>(i, j) - offset_c.at<double>(iy, ix));
delta += fabs(offset_r.at<double>(i, j) - offset_r.at<double>(iy, ix));
if (fabs(delta) >= thresh) count++;
if (count > 2) { sentinel.at<double>(i, j) = 1.0; c++; }
}
}
Mat offset_c_0, offset_r_0, offset_coord_row_0, offset_coord_col_0;
offset_c_0 = Mat::zeros(m * n - c, 1, CV_64F);
offset_r_0 = Mat::zeros(m * n - c, 1, CV_64F);
offset_coord_row_0 = Mat::zeros(m * n - c, 1, CV_64F);
offset_coord_col_0 = Mat::zeros(m * n - c, 1, CV_64F);
count = 0;
for (int i = 0; i < m; i++)
{
for (int j = 0; j < n; j++)
{
if (sentinel.at<double>(i, j) < 0.5)
{
offset_r_0.at<double>(count, 0) = offset_r.at<double>(i, j);
offset_c_0.at<double>(count, 0) = offset_c.at<double>(i, j);
offset_coord_row_0.at<double>(count, 0) = offset_coord_row.at<double>(i, j);
offset_coord_col_0.at<double>(count, 0) = offset_coord_col.at<double>(i, j);
count++;
}
}
}
offset_c = offset_c_0;
offset_r = offset_r_0;
offset_coord_row = offset_coord_row_0;
offset_coord_col = offset_coord_col_0;
m = 1; n = count;
if (count < 11)
{
fprintf(stderr, "coregistration_pixel(): insufficient valide sub blocks!\n");
return -1;
}
double offset_x = (double)master.GetCols() / 2;
double offset_y = (double)master.GetRows() / 2;
double scale_x = (double)master.GetCols();
double scale_y = (double)master.GetRows();
offset_coord_row -= offset_y;
offset_coord_col -= offset_x;
offset_coord_row /= scale_y;
offset_coord_col /= scale_x;
Mat A = Mat::ones(m * n, 10, CV_64F);
Mat temp, A_t;
offset_coord_col.copyTo(A(Range(0, m * n), Range(1, 2)));
offset_coord_row.copyTo(A(Range(0, m * n), Range(2, 3)));
temp = offset_coord_col.mul(offset_coord_row);
temp.copyTo(A(Range(0, m * n), Range(3, 4)));
temp = offset_coord_col.mul(offset_coord_col);
temp.copyTo(A(Range(0, m * n), Range(4, 5)));
temp = offset_coord_row.mul(offset_coord_row);
temp.copyTo(A(Range(0, m * n), Range(5, 6)));
temp = offset_coord_col.mul(offset_coord_col);
temp = temp.mul(offset_coord_row);
temp.copyTo(A(Range(0, m * n), Range(6, 7)));
temp = offset_coord_row.mul(offset_coord_row);
temp = temp.mul(offset_coord_col);
temp.copyTo(A(Range(0, m * n), Range(7, 8)));
temp = offset_coord_col.mul(offset_coord_col);
temp = temp.mul(offset_coord_col);
temp.copyTo(A(Range(0, m * n), Range(8, 9)));
temp = offset_coord_row.mul(offset_coord_row);
temp = temp.mul(offset_coord_row);
temp.copyTo(A(Range(0, m * n), Range(9, 10)));
transpose(A, A_t);
Mat b_r, b_c, coef_r, coef_c, error_r, error_c, b_t, a, a_t;
A.copyTo(a);
cv::transpose(a, a_t);
offset_r.copyTo(b_r);
b_r = A_t * b_r;
offset_c.copyTo(b_c);
b_c = A_t * b_c;
A = A_t * A;
double rms1 = -1.0; double rms2 = -1.0;
Mat eye = Mat::zeros(m * n, m * n, CV_64F);
for (int i = 0; i < m * n; i++)
{
eye.at<double>(i, i) = 1.0;
}
if (cv::invert(A, error_r, cv::DECOMP_LU) > 0)
{
cv::transpose(offset_r, b_t);
error_r = b_t * (eye - a * error_r * a_t) * offset_r;
rms1 = sqrt(error_r.at<double>(0, 0) / double(m * n));
}
if (cv::invert(A, error_c, cv::DECOMP_LU) > 0)
{
cv::transpose(offset_c, b_t);
error_c = b_t * (eye - a * error_c * a_t) * offset_c;
rms2 = sqrt(error_c.at<double>(0, 0) / double(m * n));
}
if (!cv::solve(A, b_r, coef_r, cv::DECOMP_NORMAL))
{
fprintf(stderr, "coregistration_subpixel(): matrix defficiency!\n");
return -1;
}
if (!cv::solve(A, b_c, coef_c, cv::DECOMP_NORMAL))
{
fprintf(stderr, "coregistration_subpixel(): matrix defficiency!\n");
return -1;
}
/*---------------------------------------*/
/* 双线性插值获取重采样后的辅图像 */
/*---------------------------------------*/
int rows = master.GetRows(); int cols = master.GetCols();
ComplexMat slave_tmp;
slave_tmp = master;
#pragma omp parallel for schedule(guided)
for (int i = 0; i < rows; i++)
{
double x, y, ii, jj; Mat tmp(1, 10, CV_64F); Mat result;
int mm, nn, mm1, nn1;
double offset_rows, offset_cols, upper, lower;
for (int j = 0; j < cols; j++)
{
jj = (double)j;
ii = (double)i;
x = (jj - offset_x) / scale_x;
y = (ii - offset_y) / scale_y;
tmp.at<double>(0, 0) = 1.0;
tmp.at<double>(0, 1) = x;
tmp.at<double>(0, 2) = y;
tmp.at<double>(0, 3) = x * y;
tmp.at<double>(0, 4) = x * x;
tmp.at<double>(0, 5) = y * y;
tmp.at<double>(0, 6) = x * x * y;
tmp.at<double>(0, 7) = x * y * y;
tmp.at<double>(0, 8) = x * x * x;
tmp.at<double>(0, 9) = y * y * y;
result = tmp * coef_r;
offset_rows = result.at<double>(0, 0);
result = tmp * coef_c;
offset_cols = result.at<double>(0, 0);
ii += offset_rows;
jj += offset_cols;
mm = (int)floor(ii); nn = (int)floor(jj);
if (mm < 0 || nn < 0 || mm > rows - 1 || nn > cols - 1)
{
slave_tmp.re.at<double>(i, j) = 0.0;
slave_tmp.im.at<double>(i, j) = 0.0;
}
else
{
mm1 = mm + 1; nn1 = nn + 1;
mm1 = mm1 >= rows - 1 ? rows - 1 : mm1;
nn1 = nn1 >= cols - 1 ? cols - 1 : nn1;
//实部插值
upper = slave.re.at<double>(mm, nn) + (slave.re.at<double>(mm, nn1) - slave.re.at<double>(mm, nn)) * (jj - (double)nn);
lower = slave.re.at<double>(mm1, nn) + (slave.re.at<double>(mm1, nn1) - slave.re.at<double>(mm1, nn)) * (jj - (double)nn);
slave_tmp.re.at<double>(i, j) = upper + (lower - upper) * (ii - (double)mm);
//虚部插值
upper = slave.im.at<double>(mm, nn) + (slave.im.at<double>(mm, nn1) - slave.im.at<double>(mm, nn)) * (jj - (double)nn);
lower = slave.im.at<double>(mm1, nn) + (slave.im.at<double>(mm1, nn1) - slave.im.at<double>(mm1, nn)) * (jj - (double)nn);
slave_tmp.im.at<double>(i, j) = upper + (lower - upper) * (ii - (double)mm);
}
}
}
slave = slave_tmp;
return 0;
}
int Registration::every_subpixel_move(int i, int j, Mat& coefficient, double* offset_row, double* offset_col)
{
if (i < 1 || j < 1 || coefficient.cols < 1 || coefficient.rows < 12 || coefficient.type() != CV_64F)
{
fprintf(stderr, "every_subpixel_move(): input check failed!\n\n");
return -1;
}
double a1, a2, b1, b2, c1, c2, d1, d2, e1, e2, f1, f2;
a1 = coefficient.at<double>(0, 0);
b1 = coefficient.at<double>(1, 0);
c1 = coefficient.at<double>(2, 0);
d1 = coefficient.at<double>(3, 0);
e1 = coefficient.at<double>(4, 0);
f1 = coefficient.at<double>(5, 0);
a2 = coefficient.at<double>(6, 0);
b2 = coefficient.at<double>(7, 0);
c2 = coefficient.at<double>(8, 0);
d2 = coefficient.at<double>(9, 0);
e2 = coefficient.at<double>(10, 0);
f2 = coefficient.at<double>(11, 0);
*offset_row = a1 + b1 * i + c1 * j + d1 * i * i + e1 * j * j + f1 * i * j;
*offset_col = a2 + b2 * i + c2 * j + d2 * i * i + e2 * j * j + f2 * i * j;
return 0;
}
int Registration::all_subpixel_move(Mat& Coordinate_x, Mat& Coordinate_y, Mat& offset_row, Mat& offset_col, Mat& para)
{
if (Coordinate_x.rows < 1 ||
Coordinate_x.cols < 1 ||
Coordinate_x.rows != Coordinate_y.rows ||
Coordinate_x.cols != Coordinate_y.cols ||
offset_row.rows != offset_col.rows ||
offset_row.cols != offset_col.cols)
{
fprintf(stderr, "all_subpixel_move(): input size/type check failed!\n\n");
return -1;
}
int N = Coordinate_x.rows;
Coordinate_x.convertTo(Coordinate_x, CV_64F);
Coordinate_y.convertTo(Coordinate_y, CV_64F);
offset_row.convertTo(offset_row, CV_64F);
offset_col.convertTo(offset_col, CV_64F);
Mat connect_h_x[] = { Mat::ones(N, 1, CV_64F), Coordinate_x, Coordinate_y, Coordinate_x.mul(Coordinate_x), Coordinate_y.mul(Coordinate_y),
Coordinate_y.mul(Coordinate_x) };
Mat matrix, matrix_t;
hconcat(connect_h_x, 6, matrix);
Mat para1;
transpose(matrix, matrix_t);
if (!solve(matrix_t * matrix, matrix_t * offset_row, para1, DECOMP_LU))
{
fprintf(stderr, "all_subpixel_move(): cant' solve least square problem!\n");
return -1;
}
Mat connect_h_y[] = { Mat::ones(N, 1, CV_64F), Coordinate_x, Coordinate_y, Coordinate_x.mul(Coordinate_x), Coordinate_y.mul(Coordinate_y),
Coordinate_y.mul(Coordinate_x) };
hconcat(connect_h_y, 6, matrix);
transpose(matrix, matrix_t);
Mat para2;
if (!solve(matrix_t * matrix, matrix_t * offset_col, para2, DECOMP_LU))
{
fprintf(stderr, "all_subpixel_move(): cant' solve least square problem!\n");
return -1;
}
Mat connect[] = { para1, para2 };
vconcat(connect, 2, para);
return 0;
}
int Registration::gcps_sift(int rows, int cols, int move_rows, int move_cols, Mat& gcps)
{
if (fabs(move_rows) > rows ||
fabs(move_cols) > cols ||
rows < 1 ||
cols < 1 ||
gcps.cols != 5 ||
gcps.type() != CV_64F ||
gcps.channels() != 1 ||
gcps.rows < 3)
{
fprintf(stderr, "gcps_sift(): input check failed!\n\n");
return -1;
}
Mat gcps_tmp, GCP;
gcps(Range(0, 2), Range(0, 5)).copyTo(GCP);
gcps.copyTo(gcps_tmp);
Mat index = Mat::zeros(gcps.rows, 1, CV_64F);
int count = 0;
//////////////////////////Scenario 1///////////////////////////////
if (move_rows > 0 && move_cols > 0)
{
for (int i = 0; i < gcps_tmp.rows; i++)
{
if (gcps_tmp.at<double>(i, 0) <= double(rows - move_rows) &&
gcps_tmp.at<double>(i, 1) <= double(cols - move_cols))
{
index.at<double>(i, 0) = 1.0;
count++;
}
}
if (count == 0)
{
fprintf(stderr, "all ground control points have been sifted out!\n\n");
return -1;
}
gcps_tmp = Mat::zeros(count, gcps.cols, CV_64F);
count = 0;
for (int i = 0; i < gcps.rows; i++)
{
if (index.at<double>(i, 0) > 0.5)
{
gcps(Range(i, i + 1), Range(0, gcps.cols)).copyTo(gcps_tmp(Range(count, count + 1), Range(0, gcps.cols)));
count++;
}
}
}
//////////////////////////Scenario 2///////////////////////////////
if (move_rows > 0 && move_cols <= 0)
{
for (int i = 0; i < gcps_tmp.rows; i++)
{
if (gcps_tmp.at<double>(i, 0) <= double(rows - move_rows) &&
gcps_tmp.at<double>(i, 1) >= double(1 - move_cols))
{
index.at<double>(i, 0) = 1.0;
gcps_tmp.at<double>(i, 1) = gcps_tmp.at<double>(i, 1) + move_cols;
count++;
}
}
if (count == 0)
{
fprintf(stderr, "all ground control points have been sifted out!\n\n");
return -1;
}
Mat gcps_tmp1 = Mat::zeros(count, gcps.cols, CV_64F);
count = 0;
for (int i = 0; i < gcps.rows; i++)
{
if (index.at<double>(i, 0) > 0.5)
{
gcps_tmp(Range(i, i + 1), Range(0, gcps.cols)).copyTo(gcps_tmp1(Range(count, count + 1), Range(0, gcps.cols)));
count++;
}
}
gcps = gcps_tmp1;
}
//////////////////////////Scenario 3///////////////////////////////
if (move_rows <= 0 && move_cols > 0)
{
for (int i = 0; i < gcps_tmp.rows; i++)
{
if (gcps_tmp.at<double>(i, 0) >= double(1 - move_rows) &&
gcps_tmp.at<double>(i, 1) <= double(cols - move_cols))
{
index.at<double>(i, 0) = 1.0;
gcps_tmp.at<double>(i, 0) = gcps_tmp.at<double>(i, 0) + move_rows;
count++;
}
}
if (count == 0)
{
fprintf(stderr, "all ground control points have been sifted out!\n\n");
return -1;
}
Mat gcps_tmp1 = Mat::zeros(count, gcps.cols, CV_64F);
count = 0;
for (int i = 0; i < gcps.rows; i++)
{
if (index.at<double>(i, 0) > 0.5)
{
gcps_tmp(Range(i, i + 1), Range(0, gcps.cols)).copyTo(gcps_tmp1(Range(count, count + 1), Range(0, gcps.cols)));
count++;
}
}
gcps = gcps_tmp1;
}
//////////////////////////Scenario 4///////////////////////////////
if (move_rows <= 0 && move_cols <= 0)
{
for (int i = 0; i < gcps_tmp.rows; i++)
{
if (gcps_tmp.at<double>(i, 0) >= double(1 - move_rows) &&
gcps_tmp.at<double>(i, 1) >= double(1 - move_cols))
{
index.at<double>(i, 0) = 1.0;
gcps_tmp.at<double>(i, 0) = gcps_tmp.at<double>(i, 0) + move_rows;
gcps_tmp.at<double>(i, 1) = gcps_tmp.at<double>(i, 1) + move_cols;
count++;
}
}
if (count == 0)
{
fprintf(stderr, "all ground control points have been sifted out!\n\n");
return -1;
}
Mat gcps_tmp1 = Mat::zeros(count, gcps.cols, CV_64F);
count = 0;
for (int i = 0; i < gcps.rows; i++)
{
if (index.at<double>(i, 0) > 0.5)
{
gcps_tmp(Range(i, i + 1), Range(0, gcps.cols)).copyTo(gcps_tmp1(Range(count, count + 1), Range(0, gcps.cols)));
count++;
}
}
gcps = gcps_tmp1;
}
Mat GCPS(2 + gcps.rows, 5, CV_64F);
for (int i = 0; i < 2; i++)
{
for (int j = 0; j < 5; j++)
{
GCPS.at<double>(i, j) = GCP.at<double>(i, j);
}
}
for (int i = 2; i < GCPS.rows; i++)
{
for (int j = 0; j < 5; j++)
{
GCPS.at<double>(i, j) = gcps.at<double>(i - 2, j);
}
}
GCPS.copyTo(gcps);
return 0;
}
5.4:Utils.cpp
// Utils.cpp : 定义 DLL 应用程序的导出函数。
//
#include<complex.h>
#include<fstream>
#include<iostream>
#include<queue>
#include"Utils.h"
using namespace cv;
using namespace std;
using namespace InSAR;
/*宏定义*/
#define RETURN_MSG \
{ \
if( fp ) fclose( fp ); \
return( -1 ); \
}
#define GET_NEXT_LINE \
{ \
if( !fgets( instring, 256, fp ) ) \
ch = 0; \
else \
ch = *instring; \
}
inline bool return_check(int ret, const char* detail_info, const char* error_head)
{
if (ret < 0)
{
fprintf(stderr, "%s %s\n\n", error_head, detail_info);
return true;
}
else
{
return false;
}
}
inline bool read_check(long ret, long ret_ref, const char* detail_info, const char* error_head)
{
if (ret != ret_ref)
{
fprintf(stderr, "%s %s\n\n", error_head, detail_info);
return true;
}
return false;
}
inline bool parallel_check(volatile bool parallel_flag, const char* detail_info, const char* parallel_error_head)
{
if (!parallel_flag)
{
fprintf(stderr, "%s %s\n\n", parallel_error_head, detail_info);
return true;
}
else
{
return false;
}
}
inline bool parallel_flag_change(volatile bool parallel_flag, int ret)
{
if (ret < 0)
{
parallel_flag = false;
return true;
}
else
{
return false;
}
}
Utils::Utils()
{
memset(this->error_head, 0, 256);
memset(this->parallel_error_head, 0, 256);
strcpy(this->error_head, "UTILS_DLL_ERROR: error happens when using ");
strcpy(this->parallel_error_head, "UTILS_DLL_ERROR: error happens when using parallel computing in function: ");
}
Utils::~Utils()
{
}
int Utils::get_mode_index(const Mat& input, int* out)
{
if (input.empty() || input.type() != CV_32S || out == NULL)
{
fprintf(stderr, "get_mode_index(): input check failed!\n");
return -1;
}
Mat temp; input.copyTo(temp);
int nr = temp.rows; int nc = temp.cols;
temp = temp.reshape(0, 1);
cv::sort(temp, temp, cv::SORT_EVERY_ROW + cv::SORT_ASCENDING);
int total = nr * nc;
int max_count = 0; int max_count_ix = 0; int count = 0, i = 0, j = 0;
while (i < total - 1)
{
count = 0;
for (j = i; j < total - 1; j++)
{
if (temp.at<int>(0, j) == temp.at<int>(0, j + 1)) count++;
else break;
}
if (max_count < count)
{
max_count = count;
max_count_ix = j;
}
j++;
i = j;
}
*out = temp.at<int>(0, max_count_ix);
return 0;
}
int Utils::diff(Mat& Src, Mat& diff1, Mat& diff2, bool same)
{
int nr = Src.rows;
int nc = Src.cols;
if (nr < 2 || nc < 2 || Src.type() != CV_64F)
{
fprintf(stderr, "diff(): input check failed!\n\n");
return -1;
}
diff1 = Src(Range(1, nr), Range(0, nc)) - Src(Range(0, nr - 1), Range(0, nc));
diff2 = Src(Range(0, nr), Range(1, nc)) - Src(Range(0, nr), Range(0, nc - 1));
if (same)
{
copyMakeBorder(diff1, diff1, 0, 1, 0, 0, BORDER_CONSTANT, Scalar(0.0));
copyMakeBorder(diff2, diff2, 0, 0, 0, 1, BORDER_CONSTANT, Scalar(0.0));
}
return 0;
}
int Utils::generate_phase(const ComplexMat& Master, const ComplexMat& Slave, Mat& phase)
{
if (Master.GetRows() < 1 ||
Master.GetCols() < 1 ||
Slave.GetRows() != Master.GetRows() ||
Slave.GetCols() != Master.GetCols())
{
fprintf(stderr, "generate_phase(): input check failed!\n\n");
return -1;
}
ComplexMat tmp;
int ret = Master.Mul(Slave, tmp, true);
phase = tmp.GetPhase();
return 0;
}
int Utils::write_DIMACS(const char* DIMACS_file_problem, triangle* tri, int num_triangle, vector<tri_node>& nodes, tri_edge* edges, long num_edges, Mat& cost)
{
if (DIMACS_file_problem == NULL ||
tri == NULL ||
num_triangle < 1 ||
nodes.size() < 3 ||
edges == NULL ||
num_edges < 3 ||
cost.rows < 2 ||
cost.cols < 2 ||
cost.channels() != 1 ||
cost.type() != CV_64F
)
{
fprintf(stderr, "write_DIMACS(): input check failed!\n\n");
return -1;
}
FILE* fp = NULL;
fp = fopen(DIMACS_file_problem, "wt");
if (fp == NULL)
{
fprintf(stderr, "write_DIMACS(): can't open %s\n", DIMACS_file_problem);
return -1;
}
int ret, num_nodes;
num_nodes = nodes.size();
long num_arcs = 0;
for (int i = 0; i < num_triangle; i++)
{
if ((tri + i) != NULL)
{
if ((tri + i)->neigh1 > 0) num_arcs++;
if ((tri + i)->neigh2 > 0) num_arcs++;
if ((tri + i)->neigh3 > 0) num_arcs++;
}
}
//统计正负残差点并写入节点信息
int positive, negative, total;
positive = 0;
negative = 0;
double thresh = 0.7;
for (int i = 0; i < num_triangle; i++)
{
if ((tri + i)->residue > thresh)
{
positive++;
}
if ((tri + i)->residue < -thresh)
{
negative++;
}
}
bool b_balanced = (positive == negative);
if (negative == 0 || positive == 0)
{
if (fp) fclose(fp);
fprintf(stderr, "write_DIMACS(): no residue point!\n\n");
return -1;
}
fprintf(fp, "c This is MCF problem file.\n");
fprintf(fp, "c Problem line(nodes, links)\n");
//统计边缘三角形个数
long boundry_tri = 0;
for (int i = 0; i < num_triangle; i++)
{
if ((tri + i) != NULL)
{
if ((edges + (tri + i)->edge1 - 1)->isBoundry ||
(edges + (tri + i)->edge2 - 1)->isBoundry ||
(edges + (tri + i)->edge3 - 1)->isBoundry)
{
boundry_tri++;
}
}
}
long n;
if (!b_balanced)
{
n = num_triangle + 1;
fprintf(fp, "p min %ld %ld\n", n, num_arcs + boundry_tri * 2);
}
else
{
n = num_triangle;
fprintf(fp, "p min %ld %ld\n", n, num_arcs);
}
fprintf(fp, "c Node descriptor lines\n");
positive = 0;
negative = 0;
int count = 0;
bool b_positive, b_negative, is_residue;
double sum = 0.0;
for (int i = 0; i < num_triangle; i++)
{
if ((tri + i) != NULL && (tri + i)->residue > thresh)
{
fprintf(fp, "n %d %lf\n", i + 1, (tri + i)->residue);
sum += (tri + i)->residue;
}
if ((tri + i) != NULL && (tri + i)->residue < -thresh)
{
fprintf(fp, "n %d %lf\n", i + 1, (tri + i)->residue);
sum += (tri + i)->residue;
}
}
//写入大地节点
if (!b_balanced)
{
fprintf(fp, "n %d %lf\n", num_triangle + 1, -sum);
}
//写入流费用
fprintf(fp, "c Arc descriptor lines(from, to, minflow, maxflow, cost)\n");
int rows, cols;
int lower_bound = 0;
int upper_bound = 5;
double cost_mean;
int nr = cost.rows;
int nc = cost.cols;
for (int i = 0; i < num_triangle; i++)
{
if ((tri + i) != NULL &&
(tri + i)->p1 >= 1 &&
(tri + i)->p1 <= num_nodes &&
(tri + i)->p2 >= 1 &&
(tri + i)->p2 <= num_nodes &&
(tri + i)->p3 >= 1 &&
(tri + i)->p3 <= num_nodes
)
{
cost_mean = 0.0;
nodes[(tri + i)->p1 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
nodes[(tri + i)->p2 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
nodes[(tri + i)->p3 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
cost_mean = cost_mean / 3;
if ((tri + i)->neigh1 > 0) fprintf(fp, "a %d %d %d %d %lf\n", i + 1, (tri + i)->neigh1, lower_bound, upper_bound, cost_mean);
if ((tri + i)->neigh2 > 0) fprintf(fp, "a %d %d %d %d %lf\n", i + 1, (tri + i)->neigh2, lower_bound, upper_bound, cost_mean);
if ((tri + i)->neigh3 > 0) fprintf(fp, "a %d %d %d %d %lf\n", i + 1, (tri + i)->neigh3, lower_bound, upper_bound, cost_mean);
}
}
if (!b_balanced)
{
//写入边界流费用
for (int i = 0; i < num_triangle; i++)
{
if ((tri + i) != NULL &&
(((edges + (tri + i)->edge1 - 1)->isBoundry) ||
((edges + (tri + i)->edge2 - 1)->isBoundry) ||
((edges + (tri + i)->edge3 - 1)->isBoundry)
))
{
cost_mean = 0.0;
nodes[(tri + i)->p1 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
nodes[(tri + i)->p2 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
nodes[(tri + i)->p3 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
cost_mean = cost_mean / 3;
fprintf(fp, "a %d %d %d %d %lf\n", i + 1, num_triangle + 1, lower_bound, upper_bound, cost_mean);
fprintf(fp, "a %d %d %d %d %lf\n", num_triangle + 1, i + 1, lower_bound, upper_bound, cost_mean);
}
}
}
if (fp) fclose(fp);
fp = NULL;
return 0;
}
int Utils::write_DIMACS(
const char* DIMACS_file_problem,
vector<triangle>& triangle,
vector<tri_node>& nodes,
vector<tri_edge>& edges,
const Mat& cost
)
{
if (DIMACS_file_problem == NULL ||
triangle.size() < 1 ||
nodes.size() < 3 ||
edges.size() < 3 ||
cost.rows < 2 ||
cost.cols < 2 ||
cost.channels() != 1 ||
cost.type() != CV_64F
)
{
fprintf(stderr, "write_DIMACS(): input check failed!\n\n");
return -1;
}
FILE* fp = NULL;
fp = fopen(DIMACS_file_problem, "wt");
if (fp == NULL)
{
fprintf(stderr, "write_DIMACS(): can't open %s\n", DIMACS_file_problem);
return -1;
}
int ret, num_nodes;
int num_triangle = triangle.size();
num_nodes = nodes.size();
long num_arcs = 0;
for (int i = 0; i < num_triangle; i++)
{
if (triangle[i].neigh1 > 0) num_arcs++;
if (triangle[i].neigh2 > 0) num_arcs++;
if (triangle[i].neigh3 > 0) num_arcs++;
}
//统计正负残差点并写入节点信息
int positive, negative, total;
positive = 0;
negative = 0;
double thresh = 0.7;
for (int i = 0; i < num_triangle; i++)
{
if (triangle[i].residue > thresh)
{
positive++;
}
if (triangle[i].residue < -thresh)
{
negative++;
}
}
bool b_balanced = (positive == negative);
if (negative == 0 && positive == 0)
{
if (fp) fclose(fp);
fprintf(stderr, "write_DIMACS(): no residue point!\n\n");
return -1;
}
fprintf(fp, "c This is MCF problem file.\n");
fprintf(fp, "c Problem line(nodes, links)\n");
//统计边缘三角形个数
long boundry_tri = 0;
for (int i = 0; i < num_triangle; i++)
{
if (edges[triangle[i].edge1 - 1].isBoundry ||
edges[triangle[i].edge2 - 1].isBoundry ||
edges[triangle[i].edge3 - 1].isBoundry)
{
boundry_tri++;
}
}
long n;
if (!b_balanced)
{
n = num_triangle + 1;
fprintf(fp, "p min %ld %ld\n", n, num_arcs + boundry_tri * 2);
}
else
{
n = num_triangle;
fprintf(fp, "p min %ld %ld\n", n, num_arcs);
}
fprintf(fp, "c Node descriptor lines\n");
positive = 0;
negative = 0;
int count = 0;
bool b_positive, b_negative, is_residue;
double sum = 0.0;
for (int i = 0; i < num_triangle; i++)
{
if (triangle[i].residue > thresh)
{
fprintf(fp, "n %d %lf\n", i + 1, triangle[i].residue);
sum += triangle[i].residue;
}
if (triangle[i].residue < -thresh)
{
fprintf(fp, "n %d %lf\n", i + 1, triangle[i].residue);
sum += triangle[i].residue;
}
}
//写入大地节点
if (!b_balanced)
{
fprintf(fp, "n %d %lf\n", num_triangle + 1, -sum);
}
//写入流费用
fprintf(fp, "c Arc descriptor lines(from, to, minflow, maxflow, cost)\n");
int rows, cols;
int lower_bound = 0;
int upper_bound = 1;
double cost_mean;
int nr = cost.rows;
int nc = cost.cols;
for (int i = 0; i < num_triangle; i++)
{
if (triangle[i].p1 >= 1 &&
triangle[i].p1 <= num_nodes &&
triangle[i].p2 >= 1 &&
triangle[i].p2 <= num_nodes &&
triangle[i].p3 >= 1 &&
triangle[i].p3 <= num_nodes
)
{
cost_mean = 0.0;
nodes[triangle[i].p1 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
nodes[triangle[i].p2 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
nodes[triangle[i].p3 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
cost_mean = cost_mean / 3;
if (triangle[i].neigh1 > 0) fprintf(fp, "a %d %d %d %d %lf\n", i + 1, triangle[i].neigh1, lower_bound, upper_bound, cost_mean);
if (triangle[i].neigh2 > 0) fprintf(fp, "a %d %d %d %d %lf\n", i + 1, triangle[i].neigh2, lower_bound, upper_bound, cost_mean);
if (triangle[i].neigh3 > 0) fprintf(fp, "a %d %d %d %d %lf\n", i + 1, triangle[i].neigh3, lower_bound, upper_bound, cost_mean);
}
}
if (!b_balanced)
{
//写入边界流费用
for (int i = 0; i < num_triangle; i++)
{
if (edges[triangle[i].edge1 - 1].isBoundry ||
edges[triangle[i].edge2 - 1].isBoundry ||
edges[triangle[i].edge3 - 1].isBoundry)
{
cost_mean = 0.0;
nodes[triangle[i].p1 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
nodes[triangle[i].p2 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
nodes[triangle[i].p3 - 1].get_pos(&rows, &cols);
if (rows >= 0 && rows <= nr - 1) cost_mean += cost.at<double>(rows, cols);
cost_mean = cost_mean / 3;
fprintf(fp, "a %d %d %d %d %lf\n", i + 1, num_triangle + 1, lower_bound, upper_bound, cost_mean);
fprintf(fp, "a %d %d %d %d %lf\n", num_triangle + 1, i + 1, lower_bound, upper_bound, cost_mean);
}
}
}
if (fp) fclose(fp);
fp = NULL;
return 0;
}
int Utils::read_DIMACS(const char* DIMACS_file_solution, Mat& k1, Mat& k2, int rows, int cols)
{
if (rows < 2 || cols < 2)
{
fprintf(stderr, "read_DIMACS(): input check failed!\n\n");
return -1;
}
char instring[256];
char ch;
double obj_value = 0;
int i, row_index, col_index, symbol;
long from, to;
double flow = 0;
k1 = Mat::zeros(rows - 1, cols, CV_64F);
k2 = Mat::zeros(rows, cols - 1, CV_64F);
long earth_node_indx = (rows - 1) * (cols - 1) + 1;
FILE* fp = NULL;
fp = fopen( DIMACS_file_solution, "rt");
if (fp == NULL)
{
fprintf(stderr, "read_DIMACS(): can't open file %s\n\n", DIMACS_file_solution);
return -1;
}
/////////////////////读取注释///////////////////////////
GET_NEXT_LINE;
while (ch != 's' && ch)
{
if (ch != 'c')
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): unknown file format!\n\n");
return -1;
}
GET_NEXT_LINE;
}
/////////////////////读取优化目标值/////////////////////
for (i = 1; i < 81; i++)
{
if (isspace((int)instring[i]) > 0)
{
i++;
break;
}
}
if (sscanf(&(instring[i]), "%lf", &obj_value) != 1)
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): unknown file format!\n\n");
return -1;
}
if (obj_value < 0.0)
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): this problem can't be solved(unbounded or infeasible)!\n\n");
return -1;
}
////////////////////读取MCF结果/////////////////////////
GET_NEXT_LINE;
while (ch && ch == 'f')
{
if (sscanf(&(instring[2]), "%ld %ld %lf", &from, &to, &flow) != 3 ||
flow < 0.0 || from < 0 || to < 0)
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): unknown file format!\n\n");
return -1;
}
//是否为接地弧
if (from == earth_node_indx || to == earth_node_indx)
{
if (from == earth_node_indx)
{
//top
if (to <= cols - 1)
{
row_index = 0;
col_index = to - 1;
symbol = 1;
k2.at<double>(row_index, col_index) = k2.at<double>(row_index, col_index) + symbol * flow;
}
//bottom
else if (to > (rows - 2) * (cols - 1))
{
symbol = -1;
row_index = rows - 1;
col_index = to - (rows - 2) * (cols - 1) - 1;
k2.at<double>(row_index, col_index) = k2.at<double>(row_index, col_index) + symbol * flow;
}
//right
else if (to % (cols - 1) == 0 && to < (rows - 2) * (cols - 1) && to >(cols - 1))
{
symbol = 1;
row_index = to / (cols - 1) - 1;
col_index = cols - 1;
k1.at<double>(row_index, col_index) = k1.at<double>(row_index, col_index) + symbol * flow;
}
//left
else
{
symbol = -1;
row_index = to / (cols - 1);
col_index = 0;
k1.at<double>(row_index, col_index) = k1.at<double>(row_index, col_index) + symbol * flow;
}
}
else
{
/*long tmp;
tmp = from;
from = to;
to = tmp;*/
//top
if (from <= cols - 1)
{
symbol = -1;
row_index = 0;
col_index = from - 1;
k2.at<double>(row_index, col_index) = k2.at<double>(row_index, col_index) + symbol * flow;
}
//bottom
else if (from >= (rows - 2) * (cols - 1))
{
symbol = 1;
row_index = rows - 1;
col_index = from - (rows - 2) * (cols - 1) - 1;
k2.at<double>(row_index, col_index) = k2.at<double>(row_index, col_index) + symbol * flow;
}
//right
else if (from % (cols - 1) == 0 && from < (rows - 2) * (cols - 1) && from >(cols - 1))
{
symbol = -1;
row_index = from / (cols - 1) - 1;
col_index = cols - 1;
k1.at<double>(row_index, col_index) = k1.at<double>(row_index, col_index) + symbol * flow;
}
//left
else
{
symbol = 1;
row_index = from / (cols - 1);
col_index = 0;
k1.at<double>(row_index, col_index) = k1.at<double>(row_index, col_index) + symbol * flow;
}
}
}
else
{
if (abs(from - to) > 1)
{
symbol = from > to ? 1 : -1;
row_index = (from > to ? to : from) / long(cols - 1);
col_index = (from > to ? to : from) % long(cols - 1);
if (col_index == 0)
{
col_index = cols - 1;
row_index--;
}
col_index--;
k2.at<double>(row_index + 1, col_index) = k2.at<double>(row_index + 1, col_index) + symbol * flow;
}
else
{
symbol = from > to ? 1 : -1;
row_index = (from > to ? to : from) / long(cols - 1);
col_index = (from > to ? to : from) % long(cols - 1);
k1.at<double>(row_index, col_index) = k1.at<double>(row_index, col_index) + symbol * flow;
}
}
GET_NEXT_LINE;
}
if (ch != 'c')
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): unknown file format!\n\n");
return -1;
}
if (fp)
{
fclose(fp);
}
return 0;
}
int Utils::write_DIMACS(const char* DIMACS_file_problem, Mat& residue, Mat& coherence, double thresh)
{
if (residue.cols < 2 ||
residue.rows < 2 ||
coherence.cols < 2 ||
coherence.rows < 2 ||
residue.type() != CV_64F ||
coherence.type() != CV_64F ||
(coherence.rows - residue.rows) != 1 ||
(coherence.cols - residue.cols) != 1 ||
thresh < 0.0)
{
fprintf(stderr, "write_DIMACS(): input check failed!\n\n");
return -1;
}
long nr = residue.rows;
long nc = residue.cols;
long i, j;
long node_index = 1;
double sum = 0.0;
//统计正负残差点数
long positive, negative, total, Arcs_num, Nodes_num;
positive = 0;
negative = 0;
for (i = 0; i < nr; i++)
{
for (j = 0; j < nc; j++)
{
if (residue.at<double>(i, j) > thresh)
{
positive++;
}
if (residue.at<double>(i, j) < -thresh)
{
negative++;
}
}
}
bool b_balanced = (positive == negative);
if (!b_balanced)
{
Nodes_num = residue.rows * residue.cols + 1;
Arcs_num = 2 * (residue.rows - 1) * residue.cols + 2 * residue.rows * (residue.cols - 1) +
2 * 2 * residue.cols + 2 * 2 * (residue.rows - 2);
}
else
{
Nodes_num = residue.rows * residue.cols;
Arcs_num = 2 * (residue.rows - 1) * residue.cols + 2 * residue.rows * (residue.cols - 1);
}
ofstream fout;
FILE* fp = NULL;
fp = fopen(DIMACS_file_problem, "wt");
if (!fp)
{
fprintf(stderr, "write_DIMACS(): cant't open file %s\n\n", DIMACS_file_problem);
return -1;
}
fprintf(fp, "c This is a DIMACS file, describing Minimum Cost Flow problem.\n");
fprintf(fp, "c Problem line (nodes, links)\n");
fprintf(fp, "p min %ld %ld\n", Nodes_num, Arcs_num);
fprintf(fp, "c Node descriptor lines (supply+ or demand-)\n");
/*
* 写入节点的度(残差值1,-1)
*/
for (i = 0; i < nr; i++)
{
for (j = 0; j < nc; j++)
{
if (residue.at<double>(i, j) > thresh)
{
node_index = i * nc + j + 1;
fprintf(fp, "n %ld %lf\n", node_index, residue.at<double>(i, j));
sum += residue.at<double>(i, j);
}
if (residue.at<double>(i, j) < -thresh)
{
node_index = i * nc + j + 1;
fprintf(fp, "n %ld %lf\n", node_index, residue.at<double>(i, j));
sum += residue.at<double>(i, j);
}
}
}
/*写接地节点*/
node_index = nc * nr + 1;
if (!b_balanced)
{
fprintf(fp, "n %ld %lf\n", node_index, -sum);
}
long earth_node_index = node_index;
/*
* 写入每个有向弧的费用(流费用)
*/
long lower_bound = 0;
long upper_bound = 5;
double mean_coherence1, mean_coherence2, mean_coherence3, mean_coherence4;
fprintf(fp, "c Arc descriptor lines (from, to, minflow, maxflow, cost)\n");
/*接地节点的有向弧流费用*/
if (!b_balanced)
{
//top
for (i = 0; i < nc; i++)
{
node_index = i + 1;
mean_coherence1 = coherence.at<double>(0, i);
mean_coherence2 = mean_coherence1;
fprintf(fp, "a %ld %ld %ld %ld %lf\na %ld %ld %ld %ld %lf\n",
node_index, earth_node_index, lower_bound, upper_bound, mean_coherence1,
earth_node_index, node_index, lower_bound, upper_bound, mean_coherence2);
}
//bottom
for (i = 0; i < nc; i++)
{
node_index = nc * (nr - 1) + i + 1;
mean_coherence1 = coherence.at<double>(nr - 1, i);
mean_coherence2 = mean_coherence1;
fprintf(fp, "a %ld %ld %ld %ld %lf\na %ld %ld %ld %ld %lf\n",
node_index, earth_node_index, lower_bound, upper_bound, mean_coherence1,
earth_node_index, node_index, lower_bound, upper_bound, mean_coherence2);
}
//left
for (i = 1; i < nr - 1; i++)
{
node_index = nc * i + 1;
mean_coherence1 = coherence.at<double>(i, 0);
mean_coherence2 = mean_coherence1;
fprintf(fp, "a %ld %ld %ld %ld %lf\na %ld %ld %ld %ld %lf\n",
node_index, earth_node_index, lower_bound, upper_bound, mean_coherence1,
earth_node_index, node_index, lower_bound, upper_bound, mean_coherence2);
}
//right
for (i = 1; i < nr - 1; i++)
{
node_index = nc * (i + 1);
mean_coherence1 = coherence.at<double>(i, nc - 1);
mean_coherence2 = mean_coherence1;
fprintf(fp, "a %ld %ld %ld %ld %lf\na %ld %ld %ld %ld %lf\n",
node_index, earth_node_index, lower_bound, upper_bound, mean_coherence1,
earth_node_index, node_index, lower_bound, upper_bound, mean_coherence2);
}
}
/*非接地节点的有向弧流费用*/
for (i = 0; i < nr - 1; i++)
{
for (j = 0; j < nc - 1; j++)
{
node_index = i * nc + j + 1;
/*正向*/
mean_coherence1 = mean(coherence(Range(i, i + 2), Range(j, j + 3))).val[0];
/*逆向*/
mean_coherence2 = mean(coherence(Range(i, i + 2), Range(j, j + 3))).val[0];
/*正向*/
mean_coherence3 = mean(coherence(Range(i, i + 3), Range(j, j + 2))).val[0];
/*逆向*/
mean_coherence4 = mean(coherence(Range(i, i + 3), Range(j, j + 2))).val[0];
fprintf(fp, "a %ld %ld %ld %ld %lf\na %ld %ld %ld %ld %lf\na %ld %ld %ld %ld %lf\na %ld %ld %ld %ld %lf\n",
node_index, node_index + 1, lower_bound, upper_bound, mean_coherence1,
node_index + 1, node_index, lower_bound, upper_bound, mean_coherence2,
node_index, node_index + nc, lower_bound, upper_bound, mean_coherence3,
node_index + nc, node_index, lower_bound, upper_bound, mean_coherence4);
}
}
for (j = 0; j < nc - 1; j++)
{
node_index = (nr - 1) * nc + j + 1;
/*正向*/
mean_coherence1 = mean(coherence(Range(nr - 1, nr + 1), Range(j, j + 3))).val[0];
/*逆向*/
mean_coherence2 = mean(coherence(Range(nr - 1, nr + 1), Range(j, j + 3))).val[0];
fprintf(fp, "a %ld %ld %ld %ld %lf\na %ld %ld %ld %ld %lf\n",
node_index, node_index + 1, lower_bound, upper_bound, mean_coherence1,
node_index + 1, node_index, lower_bound, upper_bound, mean_coherence2);
}
for (i = 0; i < nr - 1; i++)
{
node_index = (i + 1) * nc;
/*正向*/
mean_coherence1 = mean(coherence(Range(i, i + 3), Range(nc - 1, nc + 1))).val[0];
/*逆向*/
mean_coherence2 = mean(coherence(Range(i, i + 3), Range(nc - 1, nc + 1))).val[0];
fprintf(fp, "a %ld %ld %ld %ld %lf\na %ld %ld %ld %ld %lf\n",
node_index, node_index + nc, lower_bound, upper_bound, mean_coherence1,
node_index + nc, node_index, lower_bound, upper_bound, mean_coherence2);
}
fprintf(fp, "c ");
fprintf(fp, "c End of file");
if (fp) fclose(fp);
fp = NULL;
return 0;
}
int Utils::cumsum(Mat& phase, int dim)
{
/*
cumulates along the dimension specified by dim
dim = 1,按列计算
dim = 2,按行计算
*/
int rows = phase.rows;
int cols = phase.cols;
int i, j;
if (rows > 0 && cols > 0)
{
switch (dim)
{
case 1:
if (phase.rows < 2 ||
phase.cols < 1 ||
phase.type() != CV_64F)
{
fprintf(stderr, "cumsum(): input check failed!\n\n");
return -1;
}
for (j = 0; j < cols; j++)
{
for (i = 1; i < rows; i++)
{
phase.at<double>(i, j) = phase.at<double>(i - 1, j) + phase.at<double>(i, j);
}
}
break;
case 2:
if (phase.rows < 1 ||
phase.cols < 2 ||
phase.type() != CV_64F)
{
fprintf(stderr, "cumsum(): input check failed!\n\n");
return -1;
}
for (i = 0; i < rows; i++)
{
for (j = 1; j < cols; j++)
{
phase.at<double>(i, j) = phase.at<double>(i, j - 1) + phase.at<double>(i, j);
}
}
break;
default:
break;
}
}
return 0;
}
int Utils::cross(Mat& vec1, Mat& vec2, Mat& out)
{
if (vec1.cols != 3 ||
vec1.rows < 1 ||
vec1.type() != CV_64F ||
vec1.channels() != 1 ||
vec1.cols != vec2.cols ||
vec1.rows != vec2.rows ||
vec2.channels() != 1 ||
vec2.type() != CV_64F
)
{
fprintf(stderr, "cross(): input check failed!\n\n");
return -1;
}
Mat out_tmp = Mat::zeros(vec1.rows, vec1.cols, CV_64F);
int rows = vec1.rows;
for (int i = 0; i < rows; i++)
{
out_tmp.at<double>(i, 0) = vec1.at<double>(i, 1) * vec2.at<double>(i, 2) -
vec1.at<double>(i, 2) * vec2.at<double>(i, 1);//a(2) * b(3) - a(3) * b(2)
out_tmp.at<double>(i, 1) = vec1.at<double>(i, 2) * vec2.at<double>(i, 0) -
vec1.at<double>(i, 0) * vec2.at<double>(i, 2);//a(3) * b(1) - a(1) * b(3)
out_tmp.at<double>(i, 2) = vec1.at<double>(i, 0) * vec2.at<double>(i, 1) -
vec1.at<double>(i, 1) * vec2.at<double>(i, 0);//a(1) * b(2) - a(2) * b(1)
}
out_tmp.copyTo(out);
return 0;
}
int Utils::gen_mask(Mat& coherence, Mat& phase_derivatives, Mat& mask, int wnd_size, double coh_thresh, double phase_derivative_thresh)
{
if (coherence.rows < 2 ||
coherence.cols < 2 ||
coherence.channels() != 1 ||
coherence.type() != CV_64F ||
coherence.rows != phase_derivatives.rows ||
coherence.cols != phase_derivatives.cols ||
phase_derivatives.channels() != 1 ||
phase_derivatives.type() != CV_64F ||
wnd_size < 0 ||
wnd_size > coherence.rows ||
coh_thresh < 0.0 ||
coh_thresh > 1.0 ||
phase_derivative_thresh < 0.0
)
{
fprintf(stderr, "gen_mask(): input check failed!\n\n");
return -1;
}
int nr = coherence.rows;
int nc = coherence.cols;
Mat temp_coh, temp_phase_derivatives;
coherence.copyTo(temp_coh);
phase_derivatives.copyTo(temp_phase_derivatives);
int radius = (wnd_size - 1) / 2;
cv::copyMakeBorder(temp_coh, temp_coh, radius, radius, radius, radius, cv::BORDER_DEFAULT);
cv::copyMakeBorder(temp_phase_derivatives, temp_phase_derivatives, radius, radius, radius, radius, cv::BORDER_DEFAULT);
Mat tmp = Mat::zeros(nr, nc, CV_32S);
tmp.copyTo(mask);
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
double mean, mean1;
for (int j = 0; j < nc; j++)
{
mean = cv::mean(temp_coh(cv::Range(i, i + 2 * radius + 1), cv::Range(j, j + 2 * radius + 1)))[0];
mean1 = cv::mean(temp_phase_derivatives(cv::Range(i, i + 2 * radius + 1), cv::Range(j, j + 2 * radius + 1)))[0];
if (mean > coh_thresh &&
coherence.at<double>(i, j) > coh_thresh &&
mean1 < phase_derivative_thresh &&
phase_derivatives.at<double>(i, j) < phase_derivative_thresh)
{
mask.at<int>(i, j) = 1;
}
}
}
return 0;
}
int Utils::residue_sift(Mat& residue_src, Mat& residue_dst, double thresh, long* num_residue)
{
int rows = residue_src.rows;
int cols = residue_src.cols;
if (rows < 1 ||
cols < 1 ||
residue_src.type() != CV_64F ||
residue_src.channels() != 1 ||
thresh < 0.0 ||
num_residue == NULL
)
{
fprintf(stderr, "residue_sift(): input check failed!\n\n");
return -1;
}
Mat tmp;
residue_src.copyTo(tmp);
*num_residue = 0;
//#pragma omp parallel for schedule(guided)
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < cols; j++)
{
if (std::fabs(residue_src.at<double>(i, j)) > thresh)
{
tmp.at<double>(i, j) = 1.0;
*num_residue = *num_residue + 1;
}
else
{
tmp.at<double>(i, j) = 0.0;
}
}
}
tmp.copyTo(residue_dst);
return 0;
}
int Utils::wrap(Mat& Src, Mat& Dst)
{
int rows = Src.rows;
int cols = Src.cols;
double pi = 3.1415926535;
if (rows < 1 || cols < 1 || Src.type() != CV_64F)
{
fprintf(stderr, "wrap(): input check failed!\n\n");
return -1;
}
Mat tmp = Mat::zeros(rows, cols, CV_64F);
#pragma omp parallel for schedule(guided)
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < cols; j++)
{
tmp.at<double>(i, j) = atan2(sin(Src.at<double>(i, j)), cos(Src.at<double>(i, j)));
}
}
//Dst = tmp;
tmp.copyTo(Dst);
return 0;
}
int Utils::residue(Mat& phase, Mat& residuemat)
{
int rows = phase.rows;
int cols = phase.cols;
int ret;
if (rows < 2 || cols < 2 || phase.type() != CV_64F)
{
fprintf(stderr, "residue(): input check failed!\n\n");
return -1;
}
Mat Diff_1 = phase(Range(1, rows), Range(0, cols)) - phase(Range(0, rows - 1), Range(0, cols));
Mat Diff_2 = phase(Range(0, rows), Range(1, cols)) - phase(Range(0, rows), Range(0, cols - 1));
ret = this->wrap(Diff_1, Diff_1);
if (return_check(ret, "wrap(*, *)", error_head)) return -1;
ret = this->wrap(Diff_2, Diff_2);
if (return_check(ret, "wrap(*, *)", error_head)) return -1;
Diff_1 = Diff_1(Range(0, Diff_1.rows), Range(1, Diff_1.cols)) -
Diff_1(Range(0, Diff_1.rows), Range(0, Diff_1.cols - 1));
Diff_2 = Diff_2(Range(1, Diff_2.rows), Range(0, Diff_2.cols)) -
Diff_2(Range(0, Diff_2.rows - 1), Range(0, Diff_2.cols));
Diff_1 = Diff_2 - Diff_1;
double pi = 3.1415926535;
Diff_1 = Diff_1 / (2 * pi);
//Diff_1.copyTo(residuemat);
residuemat = Diff_1;
return 0;
}
int Utils::residue(triangle* tri, int num_triangle, vector<tri_node>& nodes, tri_edge* edges, int num_edges)
{
if (tri == NULL ||
num_triangle < 1 ||
nodes.size() < 1 ||
edges == NULL ||
num_edges < 3
)
{
fprintf(stderr, "residue(): input check failed!\n\n");
return -1;
}
double thresh = 50.0;
int num_nodes = nodes.size();
int end1, end2, end3, tmp;
double x1, y1, x2, y2, x3, y3, direction, delta12, delta23, delta31, residue, phi1, phi2, phi3, distance1,
distance2, distance3;
int row1, col1, row2, col2, row3, col3;
bool b_res = false;
for (int i = 0; i < num_triangle; i++)
{
if ((tri + i) != NULL)
{
end1 = (tri + i)->p1;
end2 = (tri + i)->p2;
end3 = (tri + i)->p3;
}
if (end1 > end2)
{
tmp = end1;
end1 = end2;
end2 = tmp;
}
nodes[end1 - 1].get_pos(&row1, &col1);
nodes[end2 - 1].get_pos(&row2, &col2);
nodes[end3 - 1].get_pos(&row3, &col3);
nodes[end1 - 1].get_distance(nodes[end2 - 1], &distance1);
nodes[end2 - 1].get_distance(nodes[end3 - 1], &distance2);
nodes[end3 - 1].get_distance(nodes[end1 - 1], &distance3);
b_res = true;
if ((distance1 > thresh) || (distance2 > thresh) || (distance3 > thresh)) b_res = false;
nodes[end1 - 1].get_phase(&phi1);
nodes[end2 - 1].get_phase(&phi2);
nodes[end3 - 1].get_phase(&phi3);
x2 = double(col2 - col1);
y2 = double(row1 - row2);
x1 = double(col1 - col3);
y1 = double(row3 - row1);
direction = x1 * y2 - x2 * y1;
delta12 = atan2(sin(phi2 - phi1), cos(phi2 - phi1));
delta23 = atan2(sin(phi3 - phi2), cos(phi3 - phi2));
delta31 = atan2(sin(phi1 - phi3), cos(phi1 - phi3));
double res = (delta12 + delta23 + delta31) / 2.0 / PI;
if (fabs(res) > 0.7 && !b_res)//标注边长超过阈值的残差边和残差节点
{
(edges + (tri + i)->edge1 - 1)->isResidueEdge = true;
(edges + (tri + i)->edge2 - 1)->isResidueEdge = true;
(edges + (tri + i)->edge3 - 1)->isResidueEdge = true;
nodes[(tri + i)->p1 - 1].set_residue(true);
nodes[(tri + i)->p2 - 1].set_residue(true);
nodes[(tri + i)->p3 - 1].set_residue(true);
}
res = b_res ? res : 0.0;
if (direction > 0.0)//在目标三角形中顺残差方向(残差方向定义为逆时针方向)
{
(tri + i)->residue = res;
}
else
{
(tri + i)->residue = -res;
}
}
return 0;
}
int Utils::residue(vector<triangle>& triangle, vector<tri_node>& nodes, vector<tri_edge>& edges, double distance_thresh)
{
if (triangle.size() < 1 ||
nodes.size() < 1 ||
edges.size() < 3
)
{
fprintf(stderr, "residue(): input check failed!\n\n");
return -1;
}
int num_triangle = triangle.size();
double thresh;
thresh = distance_thresh < 2.0 ? 2.0 : distance_thresh;
int num_nodes = nodes.size();
int end1, end2, end3, tmp;
double x1, y1, x2, y2, x3, y3, direction, delta12, delta23, delta31, residue, phi1, phi2, phi3, distance1,
distance2, distance3;
int row1, col1, row2, col2, row3, col3;
bool b_res = false;
for (int i = 0; i < num_triangle; i++)
{
end1 = triangle[i].p1;
end2 = triangle[i].p2;
end3 = triangle[i].p3;
if (end1 > end2)
{
tmp = end1;
end1 = end2;
end2 = tmp;
}
nodes[end1 - 1].get_pos(&row1, &col1);
nodes[end2 - 1].get_pos(&row2, &col2);
nodes[end3 - 1].get_pos(&row3, &col3);
nodes[end1 - 1].get_distance(nodes[end2 - 1], &distance1);
nodes[end2 - 1].get_distance(nodes[end3 - 1], &distance2);
nodes[end3 - 1].get_distance(nodes[end1 - 1], &distance3);
b_res = true;
if ((distance1 > thresh) || (distance2 > thresh) || (distance3 > thresh)) b_res = false;
nodes[end1 - 1].get_phase(&phi1);
nodes[end2 - 1].get_phase(&phi2);
nodes[end3 - 1].get_phase(&phi3);
x2 = double(col2 - col1);
y2 = -double(row1 - row2);
x1 = double(col1 - col3);
y1 = -double(row3 - row1);
direction = x1 * y2 - x2 * y1;
delta12 = atan2(sin(phi2 - phi1), cos(phi2 - phi1));
delta23 = atan2(sin(phi3 - phi2), cos(phi3 - phi2));
delta31 = atan2(sin(phi1 - phi3), cos(phi1 - phi3));
double res = (delta12 + delta23 + delta31) / 2.0 / PI;
if (fabs(res) > 0.7 && !b_res)//标注边长超过阈值的残差边和残差节点
{
edges[triangle[i].edge1 - 1].isResidueEdge = true;
edges[triangle[i].edge2 - 1].isResidueEdge = true;
edges[triangle[i].edge3 - 1].isResidueEdge = true;
nodes[triangle[i].p1 - 1].set_residue(true);
nodes[triangle[i].p2 - 1].set_residue(true);
nodes[triangle[i].p3 - 1].set_residue(true);
}
res = b_res ? res : 0.0;
if (direction < 0.0)//在目标三角形中顺残差方向(残差方向定义为逆时针方向)
{
triangle[i].residue = res;
}
else
{
triangle[i].residue = -res;
}
}
return 0;
}
int Utils::gen_mask(Mat& coherence, Mat& mask, int wnd_size, double thresh)
{
if (coherence.rows < 2 ||
coherence.cols < 2 ||
coherence.channels() != 1 ||
coherence.type() != CV_64F ||
wnd_size < 0 ||
wnd_size > coherence.rows ||
thresh < 0.0 ||
thresh > 1.0
)
{
fprintf(stderr, "gen_mask(): input check failed!\n\n");
return -1;
}
int nr = coherence.rows;
int nc = coherence.cols;
Mat temp_coh;
coherence.copyTo(temp_coh);
int radius = (wnd_size + 1) / 2;
cv::copyMakeBorder(temp_coh, temp_coh, radius, radius, radius, radius, cv::BORDER_REFLECT);
Mat tmp = Mat::zeros(nr, nc, CV_32S);
tmp.copyTo(mask);
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
double mean;
for (int j = 0; j < nc; j++)
{
mean = cv::mean(temp_coh(cv::Range(i, i + 2 * radius + 1), cv::Range(j, j + 2 * radius + 1)))[0];
if (mean > thresh && coherence.at<double>(i, j) > thresh) mask.at<int>(i, j) = 1;
}
}
return 0;
}
int Utils::real_coherence(ComplexMat& Mast, ComplexMat& Slave, Mat& coherence)
{
int wa = 3; //窗口方位向尺寸
int wr = 3; //窗口距离向尺寸
int na = Mast.GetRows();
int nr = Mast.GetCols();
if ((na < 3) ||
(nr < 3) ||
Mast.re.type() != CV_64F ||
Slave.re.type() != CV_64F ||
Mast.GetCols() != Slave.GetCols() ||
Mast.GetRows() != Slave.GetRows())
{
fprintf(stderr, "real_coherence(): input check failed!\n\n");
return -1;
}
int win_a = (wa - 1) / 2; //方位窗半径
int win_r = (wr - 1) / 2; //距离窗半径
int na_new = na - 2 * win_a;
int nr_new = nr - 2 * win_r;
Mat Coherence(na_new, nr_new, CV_64F, Scalar::all(0));
#pragma omp parallel for schedule(guided)
for (int i = win_a + 1; i <= na - win_a; i++)
{
for (int j = win_r + 1; j <= nr - win_r; j++)
{
Mat s1, s2, sum1, sum2;
double up, down;
magnitude(Mast.re(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)), Mast.im(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)), s1);
magnitude(Slave.re(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)), Slave.im(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)), s2);
up = sum((s1.mul(s1)).mul(s2.mul(s2)))[0];
pow(s1, 4, s1);
pow(s2, 4, s2);
down = sqrt(sum(s1)[0] * sum(s2)[0]);
if (up / (down + 1e-12) > 1.0)
{
Coherence.at<double>(i - 1 - win_a, j - 1 - win_r) = 1;
}
else
{
Coherence.at<double>(i - 1 - win_a, j - 1 - win_r) = up / (down + 1e-12);
}
}
}
copyMakeBorder(Coherence, Coherence, 1, 1, 1, 1, BORDER_REFLECT);
coherence = Coherence;
return 0;
}
int Utils::real_coherence(const ComplexMat& master_image, const ComplexMat& slave_image, int est_wndsize_rg, int est_wndsize_az, Mat& coherence)
{
int na = master_image.GetRows();
int nr = master_image.GetCols();
if ((na < est_wndsize_az) ||
(nr < est_wndsize_rg) ||
master_image.type() != CV_64F ||
slave_image.type() != CV_64F ||
master_image.GetCols() != slave_image.GetCols() ||
master_image.GetRows() != slave_image.GetRows() ||
est_wndsize_rg % 2 == 0 ||
est_wndsize_az % 2 == 0 ||
est_wndsize_rg < 3 ||
est_wndsize_az < 3
)
{
fprintf(stderr, "real_coherence(): input check failed!\n\n");
return -1;
}
int win_a = (est_wndsize_az - 1) / 2; //方位窗半径
int win_r = (est_wndsize_rg - 1) / 2; //距离窗半径
int na_new = na - 2 * win_a;
int nr_new = nr - 2 * win_r;
Mat Coherence(na_new, nr_new, CV_64F, Scalar::all(0));
#pragma omp parallel for schedule(guided)
for (int i = win_a + 1; i <= na - win_a; i++)
{
for (int j = win_r + 1; j <= nr - win_r; j++)
{
Mat s1, s2, sum1, sum2;
double up, down;
magnitude(master_image.re(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)), master_image.im(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)), s1);
magnitude(slave_image.re(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)), slave_image.im(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)), s2);
up = sum((s1.mul(s1)).mul(s2.mul(s2)))[0];
pow(s1, 4, s1);
pow(s2, 4, s2);
down = sqrt(sum(s1)[0] * sum(s2)[0]);
if (up / (down + 1e-12) > 1.0)
{
Coherence.at<double>(i - 1 - win_a, j - 1 - win_r) = 1;
}
else
{
Coherence.at<double>(i - 1 - win_a, j - 1 - win_r) = up / (down + 1e-12);
}
}
}
copyMakeBorder(Coherence, Coherence, win_a, win_a, win_r, win_r, BORDER_REFLECT);
Coherence.copyTo(coherence);
return 0;
}
int Utils::complex_coherence(ComplexMat& Mast, ComplexMat& Slave, Mat& coherence)
{
int wa = 3; //窗口方位向尺寸
int wr = 3; //窗口距离向尺寸
int na = Mast.GetRows();
int nr = Mast.GetCols();
if ((na < 3) ||
(nr < 3) ||
Mast.re.type() != CV_64F ||
Slave.re.type() != CV_64F ||
Mast.GetCols() != Slave.GetCols() ||
Mast.GetRows() != Slave.GetRows())
{
fprintf(stderr, "complex_coherence(): input check failed!\n\n");
return -1;
}
int win_a = (wa - 1) / 2; //方位窗半径
int win_r = (wr - 1) / 2; //距离窗半径
int na_new = na - 2 * win_a;
int nr_new = nr - 2 * win_r;
Mat Coherence(na_new, nr_new, CV_64F, Scalar::all(0));
#pragma omp parallel for schedule(guided)
for (int i = win_a + 1; i <= na - win_a; i++)
{
for (int j = win_r + 1; j <= nr - win_r; j++)
{
Mat planes_master[] = { Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F), Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F) };
Mat planes_slave[] = { Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F), Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F) };
Mat planes[] = { Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F), Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F) };
Mat s1, s2;
double up, down, sum1, sum2;
Mast.re(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)).copyTo(planes_master[0]);
Mast.im(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)).copyTo(planes_master[1]);
Slave.re(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)).copyTo(planes_slave[0]);
Slave.im(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)).copyTo(planes_slave[1]);
merge(planes_master, 2, s1);
merge(planes_slave, 2, s2);
mulSpectrums(s1, s2, s1, 0, true);
split(s1, planes);
sum1 = sum(planes[0])[0];
sum2 = sum(planes[1])[0];
up = sqrt(sum1 * sum1 + sum2 * sum2);
magnitude(planes_master[0], planes_master[1], planes_master[0]);
magnitude(planes_slave[0], planes_slave[1], planes_slave[0]);
sum1 = sum(planes_master[0].mul(planes_master[0]))[0];
sum2 = sum(planes_slave[0].mul(planes_slave[0]))[0];
down = sqrt(sum1 * sum2);
Coherence.at<double>(i - 1 - win_a, j - 1 - win_r) = up / (down + 0.0000001);
}
}
copyMakeBorder(Coherence, Coherence, 1, 1, 1, 1, BORDER_REFLECT);
coherence = Coherence;
return 0;
}
int Utils::complex_coherence(
const ComplexMat& master_image,
const ComplexMat& slave_image,
int est_wndsize_rg,
int est_wndsize_az,
Mat& coherence
)
{
int na = master_image.GetRows();
int nr = master_image.GetCols();
if ((na < est_wndsize_az) ||
(nr < est_wndsize_rg) ||
master_image.type() != CV_64F ||
slave_image.type() != CV_64F ||
master_image.GetCols() != slave_image.GetCols() ||
master_image.GetRows() != slave_image.GetRows() ||
est_wndsize_az % 2 == 0 ||
est_wndsize_rg % 2 == 0 ||
est_wndsize_rg < 3 ||
est_wndsize_az < 3
)
{
fprintf(stderr, "complex_coherence(): input check failed!\n\n");
return -1;
}
int win_a = (est_wndsize_az - 1) / 2; //方位窗半径
int win_r = (est_wndsize_rg - 1) / 2; //距离窗半径
int na_new = na - 2 * win_a;
int nr_new = nr - 2 * win_r;
Mat Coherence(na_new, nr_new, CV_64F, Scalar::all(0));
#pragma omp parallel for schedule(guided)
for (int i = win_a + 1; i <= na - win_a; i++)
{
for (int j = win_r + 1; j <= nr - win_r; j++)
{
Mat planes_master[] = { Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F), Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F) };
Mat planes_slave[] = { Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F), Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F) };
Mat planes[] = { Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F), Mat::zeros(2 * win_a + 1, 2 * win_r + 1, CV_64F) };
Mat s1, s2;
double up, down, sum1, sum2;
master_image.re(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)).copyTo(planes_master[0]);
master_image.im(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)).copyTo(planes_master[1]);
slave_image.re(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)).copyTo(planes_slave[0]);
slave_image.im(Range(i - 1 - win_a, i + win_a), Range(j - 1 - win_r, j + win_r)).copyTo(planes_slave[1]);
merge(planes_master, 2, s1);
merge(planes_slave, 2, s2);
mulSpectrums(s1, s2, s1, 0, true);
split(s1, planes);
sum1 = sum(planes[0])[0];
sum2 = sum(planes[1])[0];
up = sqrt(sum1 * sum1 + sum2 * sum2);
magnitude(planes_master[0], planes_master[1], planes_master[0]);
magnitude(planes_slave[0], planes_slave[1], planes_slave[0]);
sum1 = sum(planes_master[0].mul(planes_master[0]))[0];
sum2 = sum(planes_slave[0].mul(planes_slave[0]))[0];
down = sqrt(sum1 * sum2);
Coherence.at<double>(i - 1 - win_a, j - 1 - win_r) = up / (down + 0.0000001);
}
}
copyMakeBorder(Coherence, Coherence, win_a, win_a, win_r, win_r, BORDER_REFLECT);
Coherence.copyTo(coherence);
return 0;
}
int Utils::phase_coherence(Mat& phase, Mat& coherence)
{
if (phase.rows < 3 ||
phase.cols < 3 ||
phase.type() != CV_64F ||
phase.channels() != 1)
{
fprintf(stderr, "phase_coherence(): input check failed!\n\n");
return -1;
}
ComplexMat master, slave;
Mat cos, sin;
int ret;
ret = this->phase2cos(phase, cos, sin);
if (return_check(ret, "phase2cos(*, *, *)", error_head)) return -1;
master.SetRe(cos);
slave.SetRe(cos);
master.SetIm(sin);
sin = -sin;
slave.SetIm(sin);
ret = this->complex_coherence(master, slave, coherence);
if (return_check(ret, "complex_coherence(*, *, *)", error_head)) return -1;
return 0;
}
int Utils::phase_coherence(const Mat& phase, int est_wndsize_rg, int est_wndsize_az, Mat& coherence)
{
if (phase.rows < 3 ||
phase.cols < 3 ||
phase.type() != CV_64F ||
phase.channels() != 1 ||
est_wndsize_rg % 2 == 0 ||
est_wndsize_az % 2 == 0
)
{
fprintf(stderr, "phase_coherence(): input check failed!\n\n");
return -1;
}
ComplexMat master, slave;
Mat cos, sin;
int ret;
ret = phase2cos(phase, cos, sin);
if (return_check(ret, "phase2cos(*, *, *)", error_head)) return -1;
master.SetRe(cos);
slave.SetRe(cos);
master.SetIm(sin);
sin = -sin;
slave.SetIm(sin);
ret = complex_coherence(master, slave, est_wndsize_rg, est_wndsize_az, coherence);
if (return_check(ret, "complex_coherence(*, *, *)", error_head)) return -1;
return 0;
}
int Utils::phase_derivatives_variance(Mat& phase, Mat& phase_derivatives_variance, int wndsize)
{
if (phase.cols < 2 ||
phase.rows < 2 ||
phase.type() != CV_64F ||
phase.channels() != 1 ||
wndsize < 3 ||
wndsize % 2 == 0
)
{
fprintf(stderr, "phase_derivatives_variance(): input check failed!\n\n");
return -1;
}
int nr = phase.rows;
int nc = phase.cols;
if (wndsize > int(nr / 10) || wndsize > int(nc / 10)) wndsize = 3;
wndsize = (wndsize - 1) / 2;
int ret;
phase.copyTo(phase_derivatives_variance);
Mat derivative_row, derivative_col;
derivative_row = phase(Range(1, nr), Range(0, nc)) - phase(Range(0, nr - 1), Range(0, nc));
derivative_col = phase(Range(0, nr), Range(1, nc)) - phase(Range(0, nr), Range(0, nc - 1));
ret = wrap(derivative_row, derivative_row);
if (return_check(ret, "wrap(*, *)", error_head)) return -1;
ret = wrap(derivative_col, derivative_col);
if (return_check(ret, "wrap(*, *)", error_head)) return -1;
copyMakeBorder(derivative_col, derivative_col, 0, 1, 0, 1, BORDER_DEFAULT);
copyMakeBorder(derivative_row, derivative_row, 0, 1, 0, 1, BORDER_DEFAULT);
copyMakeBorder(derivative_col, derivative_col, wndsize, wndsize, wndsize, wndsize, BORDER_DEFAULT);
copyMakeBorder(derivative_row, derivative_row, wndsize, wndsize, wndsize, wndsize, BORDER_DEFAULT);
//cv::meanStdDev()
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
double std1, std2, mean1, mean2;
Mat tmp1, tmp2;
for (int j = 0; j < nc; j++)
{
mean1 = cv::mean(derivative_row(Range(i, i + 2 * wndsize + 1), Range(j, j + 2 * wndsize + 1)))[0];
mean2 = cv::mean(derivative_col(Range(i, i + 2 * wndsize + 1), Range(j, j + 2 * wndsize + 1)))[0];
tmp1 = derivative_row(Range(i, i + 2 * wndsize + 1), Range(j, j + 2 * wndsize + 1)) - mean1;
tmp2 = derivative_col(Range(i, i + 2 * wndsize + 1), Range(j, j + 2 * wndsize + 1)) - mean2;
tmp1 = tmp1.mul(tmp1);
tmp2 = tmp2.mul(tmp2);
std1 = sum(tmp1)[0];
std2 = sum(tmp2)[0];
phase_derivatives_variance.at<double>(i, j) = (sqrt(std1) + sqrt(std2)) / ((2 * wndsize + 1) * (2 * wndsize + 1));
}
}
return 0;
}
int Utils::max_integrable_distance(Mat& phase, Mat& max_integrable_distance, double conservative_thresh)
{
if (phase.rows < 5 ||
phase.cols < 5 ||
phase.channels() != 1 ||
phase.type() != CV_64F ||
conservative_thresh < 1.41
)
{
fprintf(stderr, "max_integrable_distance(): input check failed!\n\n");
return -1;
}
int nr = phase.rows;
int nc = phase.cols;
max_integrable_distance = Mat::ones(nr, nc, CV_64F);
max_integrable_distance = max_integrable_distance * 1.5;
#pragma omp parallel for schedule(guided)
for (int i = 1; i < nr - 1; i++)
{
for (int j = 1; j < nc - 1; j++)
{
double max = -1.0;
double delta, ph0;
ph0 = phase.at<double>(i, j);
delta = phase.at<double>(i - 1, j - 1) - ph0;
delta = fabs(atan2(sin(delta), cos(delta))) / 1.414;
max = max > delta ? max : delta;
delta = phase.at<double>(i - 1, j) - ph0;
delta = fabs(atan2(sin(delta), cos(delta))) / 1.0;
max = max > delta ? max : delta;
delta = phase.at<double>(i - 1, j + 1) - ph0;
delta = fabs(atan2(sin(delta), cos(delta))) / 1.414;
max = max > delta ? max : delta;
delta = phase.at<double>(i, j - 1) - ph0;
delta = fabs(atan2(sin(delta), cos(delta))) / 1.0;
max = max > delta ? max : delta;
delta = phase.at<double>(i, j + 1) - ph0;
delta = fabs(atan2(sin(delta), cos(delta))) / 1.0;
max = max > delta ? max : delta;
delta = phase.at<double>(i + 1, j - 1) - ph0;
delta = fabs(atan2(sin(delta), cos(delta))) / 1.414;
max = max > delta ? max : delta;
delta = phase.at<double>(i + 1, j) - ph0;
delta = fabs(atan2(sin(delta), cos(delta))) / 1.0;
max = max > delta ? max : delta;
delta = phase.at<double>(i + 1, j + 1) - ph0;
delta = fabs(atan2(sin(delta), cos(delta))) / 1.414;
max = max > delta ? max : delta;
if (max < 1.0 / conservative_thresh * PI)
{
max = 1.0 / conservative_thresh * PI;
}
max_integrable_distance.at<double>(i, j) = PI / max < 1.5 ? 1.5 : PI / max;
}
}
return 0;
}
int Utils::fftshift(Mat& mag)
{
// rearrange the quadrants of Fourier image
// so that the origin is at the image center
if (mag.rows < 2 ||
mag.cols < 2 ||
mag.channels() != 1)
{
fprintf(stderr, "fftshift(): input check failed!\n\n");
return -1;
}
mag = mag(Rect(0, 0, mag.cols & -2, mag.rows & -2));
int cx = mag.cols / 2;
int cy = mag.rows / 2;
Mat tmp;
Mat q0(mag, Rect(0, 0, cx, cy));
Mat q1(mag, Rect(cx, 0, cx, cy));
Mat q2(mag, Rect(0, cy, cx, cy));
Mat q3(mag, Rect(cx, cy, cx, cy));
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
return 0;
}
int Utils::read_DIMACS(const char* DIMACS_file_solution, tri_edge* edges, int num_edges, vector<tri_node>& nodes, triangle* tri, int num_triangle)
{
if (DIMACS_file_solution == NULL ||
edges == NULL ||
num_edges < 3 ||
nodes.size() < 3 ||
tri == NULL ||
num_triangle < 1
)
{
fprintf(stderr, "read_DIMACS(): input check failed!\n\n");
return -1;
}
FILE* fp = NULL;
fp = fopen(DIMACS_file_solution, "rt");
if (fp == NULL)
{
fprintf(stderr, "read_DIMACS(): can't open %s \n", DIMACS_file_solution);
return -1;
}
char instring[256];
char ch;
double obj_value = 0;
int i, tmp, end1, end2, end3, row1, col1, row2, col2, row3, col3;
int end[3];
double x1, y1, x2, y2, direction;
long from, to;
double flow = 0;
bool flag;
int x[3];
int y[3];
long* ptr_neigh = NULL;
int num_neigh, target_edges;
int num_nodes = nodes.size();
/////////////////////读取注释///////////////////////////
GET_NEXT_LINE;
while (ch != 's' && ch)
{
if (ch != 'c')
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): unknown file format!\n\n");
return -1;
}
GET_NEXT_LINE;
}
/////////////////////读取优化目标值/////////////////////
for (i = 1; i < 81; i++)
{
if (isspace((int)instring[i]) > 0)
{
i++;
break;
}
}
if (sscanf(&(instring[i]), "%lf", &obj_value) != 1)
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): unknown file format!\n\n");
return -1;
}
if (obj_value < 0.0)
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): this problem can't be solved(unbounded or infeasible)!\n\n");
return -1;
}
////////////////////////读取MCF结果////////////////////////
GET_NEXT_LINE;
while (ch && ch == 'f')
{
if (sscanf(&(instring[2]), "%ld %ld %lf", &from, &to, &flow) != 3 ||
flow < 0.0 || from < 0 || to < 0)
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): unknown file format!\n\n");
return -1;
}
if (from > 0 &&
from <= num_triangle &&
to > 0 &&
to <= num_triangle)
{
if (/*from > 0 &&
from <= num_triangle &&
to > 0 &&
to <= num_triangle &&*/
(tri + from - 1) != NULL &&
(tri + to - 1) != NULL
)
{
end[0] = -1;
end[1] = -1;
x[0] = (tri + from - 1)->p1;
x[1] = (tri + from - 1)->p2;
x[2] = (tri + from - 1)->p3;
y[0] = (tri + to - 1)->p1;
y[1] = (tri + to - 1)->p2;
y[2] = (tri + to - 1)->p3;
i = 0; tmp = 0; flag = false;
while (end[0] == -1 || end[1] == -1)
{
if (i > 2)
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): illegal Delaunay triangle!\n\n");
return -1;
}
for (int j = 0; j < 3; j++)
{
if (x[i] == y[j])
{
end[tmp] = x[i];
tmp++;
if (i == 0) flag = true;
break;
}
}
i++;
}
}
if (i == 3)
{
if (flag) end[2] = x[1];
else
{
end[2] = x[0];
}
}
else
{
end[2] = x[2];
}
if (end[0] > end[1])
{
end1 = end[1];
end2 = end[0];
}
else
{
end1 = end[0];
end2 = end[1];
}
end3 = end[2];
if (end1 > 0 && end1 <= num_nodes && end2 > 0 && end2 <= num_nodes && end3 > 0 && end3 <= num_nodes)
{
//找到边序号target_edges
nodes[end1 - 1].get_neigh_ptr(&ptr_neigh, &num_neigh);
for (i = 0; i < num_neigh; i++)
{
if ((ptr_neigh + i) != NULL && *(ptr_neigh + i) > 0 && *(ptr_neigh + i) <= num_edges)
{
if ((edges + *(ptr_neigh + i) - 1)->end1 == end2 || (edges + *(ptr_neigh + i) - 1)->end2 == end2)
{
target_edges = *(ptr_neigh + i);
}
}
}
nodes[end1 - 1].get_pos(&row1, &col1);
nodes[end2 - 1].get_pos(&row2, &col2);
nodes[end3 - 1].get_pos(&row3, &col3);
x1 = double(col1 - col3);
y1 = double(row3 - row1);
x2 = double(col2 - col1);
y2 = double(row1 - row2);
direction = x1 * y2 - x2 * y1;
if (direction > 0.0)//在目标三角形中顺残差方向
{
(edges + target_edges - 1)->gain = flow;
}
else
{
(edges + target_edges - 1)->gain = -flow;
}
}
}
GET_NEXT_LINE;
}
if (fp)
{
fclose(fp);
fp = NULL;
}
return 0;
}
int Utils::read_DIMACS(
const char* DIMACS_file_solution,
vector<tri_edge>& edges,
vector<tri_node>& nodes,
vector<triangle>& triangle
)
{
if (DIMACS_file_solution == NULL ||
edges.size() < 3 ||
nodes.size() < 3 ||
triangle.size() < 1
)
{
fprintf(stderr, "read_DIMACS(): input check failed!\n\n");
return -1;
}
FILE* fp = NULL;
fp = fopen(DIMACS_file_solution, "rt");
if (fp == NULL)
{
fprintf(stderr, "read_DIMACS(): can't open %s \n", DIMACS_file_solution);
return -1;
}
char instring[256];
char ch;
double obj_value = 0;
int i, tmp, end1, end2, end3, row1, col1, row2, col2, row3, col3;
int end[3];
double x1, y1, x2, y2, direction;
long from, to;
double flow = 0;
bool flag;
int x[3];
int y[3];
long* ptr_neigh = NULL;
int num_neigh, target_edges;
int num_nodes = nodes.size();
int num_triangle = triangle.size(); int num_edges = edges.size();
/////////////////////读取注释///////////////////////////
GET_NEXT_LINE;
while (ch != 's' && ch)
{
if (ch != 'c')
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): unknown file format!\n\n");
return -1;
}
GET_NEXT_LINE;
}
/////////////////////读取优化目标值/////////////////////
for (i = 1; i < 81; i++)
{
if (isspace((int)instring[i]) > 0)
{
i++;
break;
}
}
if (sscanf(&(instring[i]), "%lf", &obj_value) != 1)
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): unknown file format!\n\n");
return -1;
}
if (obj_value < 0.0)
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): this problem can't be solved(unbounded or infeasible)!\n\n");
return -1;
}
////////////////////////读取MCF结果////////////////////////
GET_NEXT_LINE;
while (ch && ch == 'f')
{
if (sscanf(&(instring[2]), "%ld %ld %lf", &from, &to, &flow) != 3 ||
flow < 0.0 || from < 0 || to < 0)
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): unknown file format!\n\n");
return -1;
}
//非接地边
if (from > 0 &&
from <= num_triangle &&
to > 0 &&
to <= num_triangle)
{
/////////寻找两个三角形的公共边//////////////
{
end[0] = -1;
end[1] = -1;
x[0] = triangle[from - 1].p1;
x[1] = triangle[from - 1].p2;
x[2] = triangle[from - 1].p3;
y[0] = triangle[to - 1].p1;
y[1] = triangle[to - 1].p2;
y[2] = triangle[to - 1].p3;
i = 0; tmp = 0; flag = false;
while (end[0] == -1 || end[1] == -1)
{
if (i > 2)
{
if (fp) fclose(fp);
fprintf(stderr, "read_DIMACS(): illegal Delaunay triangle!\n\n");
return -1;
}
for (int j = 0; j < 3; j++)
{
if (x[i] == y[j])
{
end[tmp] = x[i];
tmp++;
if (i == 0) flag = true;
break;
}
}
i++;
}
}
if (i == 3)
{
if (flag) end[2] = x[1];
else
{
end[2] = x[0];
}
}
else
{
end[2] = x[2];
}
if (end[0] > end[1])
{
end1 = end[1];
end2 = end[0];
}
else
{
end1 = end[0];
end2 = end[1];
}
end3 = end[2];
/////////寻找两个三角形的公共边//////////////
if (end1 > 0 && end1 <= num_nodes && end2 > 0 && end2 <= num_nodes && end3 > 0 && end3 <= num_nodes)
{
//找到边序号target_edges
nodes[end1 - 1].get_neigh_ptr(&ptr_neigh, &num_neigh);
for (i = 0; i < num_neigh; i++)
{
if ((ptr_neigh + i) != NULL && *(ptr_neigh + i) > 0 && *(ptr_neigh + i) <= num_edges)
{
if (edges[*(ptr_neigh + i) - 1].end1 == end2 || edges[*(ptr_neigh + i) - 1].end2 == end2)
{
target_edges = *(ptr_neigh + i);
}
}
}
nodes[end1 - 1].get_pos(&row1, &col1);
nodes[end2 - 1].get_pos(&row2, &col2);
nodes[end3 - 1].get_pos(&row3, &col3);
x1 = double(col1 - col3);
y1 = -double(row3 - row1);
x2 = double(col2 - col1);
y2 = -double(row1 - row2);
direction = x1 * y2 - x2 * y1;
if (direction < 0.0)//在目标三角形中顺残差方向
{
edges[target_edges - 1].gain = -flow;
}
else
{
edges[target_edges - 1].gain = flow;
}
}
}
//接地边
if (from == num_triangle + 1 || to == num_triangle + 1)
{
if (from == num_triangle + 1)
{
if (edges[triangle[to - 1].edge1 - 1].isBoundry)target_edges = triangle[to - 1].edge1;
else if (edges[triangle[to - 1].edge2 - 1].isBoundry) target_edges = triangle[to - 1].edge2;
else target_edges = triangle[to - 1].edge3;
if (edges[target_edges - 1].end1 > edges[target_edges - 1].end2)
{
end1 = edges[target_edges - 1].end2;
end2 = edges[target_edges - 1].end1;
}
else
{
end1 = edges[target_edges - 1].end1;
end2 = edges[target_edges - 1].end2;
}
if (triangle[to - 1].p1 != end1 && triangle[to - 1].p1 != end2) end3 = triangle[to - 1].p1;
else if (triangle[to - 1].p2 != end1 && triangle[to - 1].p2 != end2) end3 = triangle[to - 1].p2;
else end3 = triangle[to - 1].p3;
nodes[end1 - 1].get_pos(&row1, &col1);
nodes[end2 - 1].get_pos(&row2, &col2);
nodes[end3 - 1].get_pos(&row3, &col3);
x1 = double(col1 - col3);
y1 = -double(row3 - row1);
x2 = double(col2 - col1);
y2 = -double(row1 - row2);
direction = x1 * y2 - x2 * y1;
if (direction < 0.0)//在目标三角形中顺残差方向
{
edges[target_edges - 1].gain = flow;
}
else
{
edges[target_edges - 1].gain = -flow;
}
}
else
{
if (edges[triangle[from - 1].edge1 - 1].isBoundry)target_edges = triangle[from - 1].edge1;
else if (edges[triangle[from - 1].edge2 - 1].isBoundry) target_edges = triangle[from - 1].edge2;
else target_edges = triangle[from - 1].edge3;
if (edges[target_edges - 1].end1 > edges[target_edges - 1].end2)
{
end1 = edges[target_edges - 1].end2;
end2 = edges[target_edges - 1].end1;
}
else
{
end1 = edges[target_edges - 1].end1;
end2 = edges[target_edges - 1].end2;
}
if (triangle[from - 1].p1 != end1 && triangle[from - 1].p1 != end2) end3 = triangle[from - 1].p1;
else if (triangle[from - 1].p2 != end1 && triangle[from - 1].p2 != end2) end3 = triangle[from - 1].p2;
else end3 = triangle[from - 1].p3;
nodes[end1 - 1].get_pos(&row1, &col1);
nodes[end2 - 1].get_pos(&row2, &col2);
nodes[end3 - 1].get_pos(&row3, &col3);
x1 = double(col1 - col3);
y1 = -double(row3 - row1);
x2 = double(col2 - col1);
y2 = -double(row1 - row2);
direction = x1 * y2 - x2 * y1;
if (direction < 0.0)//在目标三角形中顺残差方向
{
edges[target_edges - 1].gain = -flow;
}
else
{
edges[target_edges - 1].gain = flow;
}
}
}
GET_NEXT_LINE;
}
if (fp)
{
fclose(fp);
fp = NULL;
}
return 0;
}
int Utils::cvmat2bin(const char* filename, Mat& mat)
{
int nr = mat.rows;
int nc = mat.cols;
if (nr < 1 || nc < 1 || mat.type() != CV_64F || mat.channels() != 1)
{
fprintf(stderr, "cvmat2bin(): input check failed!\n\n");
return -1;
}
FILE* fp = NULL;
fp = fopen(filename, "wb");
if (fp == NULL)
{
fprintf(stderr, "can't open file: %s\n", filename);
return -1;
}
fwrite(&nr, sizeof(int), 1, fp);
fwrite(&nc, sizeof(int), 1, fp);
fwrite((double*)mat.data, sizeof(double), nr * nc, fp);
if (fp != NULL) fclose(fp);
return 0;
}
int Utils::bin2cvmat(const char* filename, Mat& dst)
{
FILE* fp = NULL;
fp = fopen(filename, "rb");
if (fp == NULL)
{
fprintf(stderr, "can't open file: %s\n", filename);
return -1;
}
int rows, cols;
fread(&rows, sizeof(int), 1, fp);
fread(&cols, sizeof(int), 1, fp);
if (rows < 1 || cols < 1)
{
fprintf(stderr, "unknown file format!\n");
if (fp) fclose(fp);
return -1;
}
Mat matrix(rows, cols, CV_64F, cv::Scalar::all(0));
double* p = (double*)malloc(sizeof(double) * rows * cols);
if (p == NULL)
{
fprintf(stderr, "failed to allocate memory for reading data from %s!\n", filename);
if (fp) fclose(fp);
return -1;
}
fread(p, sizeof(double), rows * cols, fp);
std::memcpy(matrix.data, p, sizeof(double) * rows * cols);
if (p != NULL) free(p);
if (fp != NULL) fclose(fp);
dst = matrix;
return 0;
}
int Utils::multilook(ComplexMat& Master, ComplexMat& Slave, Mat& phase, int multilook_times)
{
if (Master.GetRows() != Slave.GetRows() ||
Master.GetCols() != Slave.GetCols() ||
Master.type() != CV_64F ||
Slave.type() != CV_64F ||
Master.GetRows() < 1 ||
Master.GetCols() < 1 ||
multilook_times < 1 ||
Master.GetRows() < multilook_times ||
Master.GetCols() < multilook_times)
{
fprintf(stderr, "multilook(): input check failed!\n\n");
return -1;
}
int ret;
if (multilook_times == 1)
{
ret = generate_phase(Master, Slave, phase);
if (return_check(ret, "generate_phase(*, *, *)", error_head)) return -1;
return 0;
}
ComplexMat tmp;
ret = Master.Mul(Slave, tmp, true);
if (return_check(ret, "Master.Mul(*, *, *)", error_head)) return -1;
int nr = tmp.GetRows();
int nc = tmp.GetCols();
nr = (nr - (nr % multilook_times)) / multilook_times;
nc = (nc - (nc % multilook_times)) / multilook_times;
Mat real = Mat::zeros(nr, nc, CV_64F);
Mat imag = Mat::zeros(nr, nc, CV_64F);
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
for (int j = 0; j < nc; j++)
{
real.at<double>(i, j) = cv::mean(tmp.re(Range(i * multilook_times, (i + 1) * multilook_times),
Range(j * multilook_times, (j + 1) * multilook_times)))[0];
imag.at<double>(i, j) = cv::mean(tmp.im(Range(i * multilook_times, (i + 1) * multilook_times),
Range(j * multilook_times, (j + 1) * multilook_times)))[0];
}
}
tmp.SetRe(real);
tmp.SetIm(imag);
phase = tmp.GetPhase();
return 0;
}
int Utils::multilook(const ComplexMat& master, const ComplexMat& slave, int multilook_rg, int multilook_az, Mat& phase)
{
if (master.GetRows() != slave.GetRows() ||
master.GetCols() != slave.GetCols() ||
master.type() != CV_64F ||
slave.type() != CV_64F ||
master.GetRows() < 1 ||
master.GetCols() < 1 ||
multilook_rg < 1 ||
multilook_az < 1 ||
master.GetRows() < multilook_az ||
master.GetCols() < multilook_rg)
{
fprintf(stderr, "multilook(): input check failed!\n\n");
return -1;
}
int ret;
if (multilook_rg == 1 && multilook_az == 1)
{
ret = generate_phase(master, slave, phase);
if (return_check(ret, "generate_phase(*, *, *)", error_head)) return -1;
return 0;
}
ComplexMat tmp;
ret = master.Mul(slave, tmp, true);
if (return_check(ret, "Master.Mul(*, *, *)", error_head)) return -1;
int nr = tmp.GetRows();
int nc = tmp.GetCols();
int radius_rg = multilook_rg / 2;
int radius_az = multilook_az / 2;
Mat real = Mat::zeros(nr, nc, CV_64F);
Mat imag = Mat::zeros(nr, nc, CV_64F);
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
int left, right, bottom, top;
for (int j = 0; j < nc; j++)
{
left = j - radius_rg; left = left < 0 ? 0 : left;
right = left + multilook_rg; right = right > nc - 1 ? nc - 1 : right;
top = i - radius_az; top = top < 0 ? 0 : top;
bottom = top + multilook_az; bottom = bottom > nr - 1 ? nr - 1 : bottom;
real.at<double>(i, j) = cv::mean(tmp.re(Range(top, bottom + 1), Range(left, right + 1)))[0];
imag.at<double>(i, j) = cv::mean(tmp.im(Range(top, bottom + 1), Range(left, right + 1)))[0];
}
}
tmp.SetRe(real);
tmp.SetIm(imag);
tmp.GetPhase().copyTo(phase);
return 0;
}
int Utils::phase2cos(const Mat& phase, Mat& cos, Mat& sin)
{
if (phase.rows < 1 ||
phase.cols < 1 ||
phase.type() != CV_64F ||
phase.channels() != 1)
{
fprintf(stderr, "phase2cos(): input check failed!\n\n");
return -1;
}
int nr = phase.rows;
int nc = phase.cols;
Mat Cos(nr, nc, CV_64F);
Mat Sin(nr, nc, CV_64F);
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
for (int j = 0; j < nc; j++)
{
Cos.at<double>(i, j) = std::cos(phase.at<double>(i, j));
Sin.at<double>(i, j) = std::sin(phase.at<double>(i, j));
}
}
Cos.copyTo(cos);
Sin.copyTo(sin);
return 0;
}
int Utils::xyz2ell(Mat xyz, Mat& llh)
{
if (xyz.rows != 1 ||
xyz.cols != 3 ||
xyz.type() != CV_64F ||
xyz.channels() != 1)
{
fprintf(stderr, "xyz2ell(): input check failed!\n\n");
return -1;
}
double x = xyz.at<double>(0, 0);
double y = xyz.at<double>(0, 1);
double z = xyz.at<double>(0, 2);
double Rad_earth_e = 6378136.49;
double f = 1 / 298.257223563;
double t = Rad_earth_e * (1 - f);
double e = sqrt((Rad_earth_e * Rad_earth_e - t * t) / (Rad_earth_e * Rad_earth_e));
double r = x * x + y * y;
if (fabs(r) < 1e-15)
{
r = 1e-14;
}
if (fabs(x) < 1e-15)
{
x = 1e-14;
}
double lat = atan(z / r);
double lon = atan(y / x);
double N, height;
double tmp = 0.0;
double pi = 3.1415926535;
for (int k = 0; k < 10; k++)
{
tmp = (sqrt(1 - e * e * sin(lat) * sin(lat)));
if (fabs(tmp) < 1e-15)
{
tmp = 1e-14;
}
N = Rad_earth_e / tmp;
tmp = sin(lat);
if (fabs(tmp) < 1e-15)
{
tmp = 1e-14;
}
height = z / tmp - N * (1 - e * e);
tmp = (sqrt(x * x + y * y) * (N * (1 - e * e) + height));
if (fabs(tmp) < 1e-15)
{
tmp = 1e-14;
}
lat = atan(z * (N + height) / tmp);
}
if (x > 0 && y < 0)
{
lon = -lon;
}
else if (x < 0 && y > 0)
{
lon = pi + lon;
}
else if (x < 0 && y < 0)
{
lon = -pi + lon;
}
lat = lat * 180 / pi;
lon = lon * 180 / pi;
llh = Mat::zeros(1, 3, CV_64F);
llh.at<double>(0, 0) = lat;
llh.at<double>(0, 1) = lon;
llh.at<double>(0, 2) = height;
return 0;
}
int Utils::ell2xyz(Mat llh, Mat& xyz)
{
if (llh.cols != 3 ||
llh.rows != 1 ||
llh.type() != CV_64F ||
llh.channels() != 1
)
{
fprintf(stderr, "ell2xyz(): input check failed!\n\n");
return -1;
}
double e2 = 0.00669438003551279091;
double lat = llh.at<double>(0, 0);
double lon = llh.at<double>(0, 1);
double height = llh.at<double>(0, 2);
lat = lat / 180.0 * PI;
lon = lon / 180.0 * PI;
double Ea = 6378136.49;
double N = Ea / sqrt(1 - e2 * (sin(lat) * sin(lat)));
double Nph = N + height;
double x = Nph * cos(lat) * cos(lon);
double y = Nph * cos(lat) * sin(lon);
double z = (Nph - e2 * N) * sin(lat);
Mat tmp = Mat::zeros(1, 3, CV_64F);
tmp.at<double>(0, 0) = x;
tmp.at<double>(0, 1) = y;
tmp.at<double>(0, 2) = z;
tmp.copyTo(xyz);
return 0;
}
int Utils::saveSLC(const char* filename, double db, ComplexMat& SLC)
{
if (filename == NULL ||
db < 0 ||
SLC.GetRows() < 1 ||
SLC.GetCols() < 1 /*||
SLC.type() != CV_64F*/)
{
fprintf(stderr, "saveSLC(): input check failed!\n\n");
return -1;
}
ComplexMat tmp;
Mat mod;
if (SLC.type() != CV_64F && SLC.type() != CV_32F)
{
SLC.re.convertTo(tmp.re, CV_32F);
SLC.im.convertTo(tmp.im, CV_32F);
mod = tmp.GetMod();
}
else
{
mod = SLC.GetMod();
}
int nr = mod.rows;
int nc = mod.cols;
double max, min;
if (SLC.type() == CV_64F)
{
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
for (int j = 0; j < nc; j++)
{
mod.at<double>(i, j) = 20 * log10(mod.at<double>(i, j) + 0.000001);
}
}
minMaxLoc(mod, &min, &max);
if (fabs(max - min) < 0.00000001)
{
fprintf(stderr, "SLC image intensity is the same for every pixel\n\n");
return -1;
}
min = max - db;
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
for (int j = 0; j < nc; j++)
{
if (mod.at<double>(i, j) <= min) mod.at<double>(i, j) = min;
}
}
}
else
{
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
for (int j = 0; j < nc; j++)
{
mod.at<float>(i, j) = 20 * log10(mod.at<float>(i, j) + 0.000001);
}
}
minMaxLoc(mod, &min, &max);
if (fabs(max - min) < 0.00000001)
{
fprintf(stderr, "SLC image intensity is the same for every pixel\n\n");
return -1;
}
min = max - db;
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
for (int j = 0; j < nc; j++)
{
if (mod.at<float>(i, j) <= min) mod.at<float>(i, j) = min;
}
}
}
mod = (mod - min) / (max - min) * 255.0;
mod.convertTo(mod, CV_8U);
bool ret = cv::imwrite(filename, mod);
if (!ret)
{
fprintf(stderr, "cv::imwrite(): can't write to %s\n\n", filename);
return -1;
}
return 0;
}
int Utils::savephase(const char* filename, const char* colormap, Mat phase)
{
if (filename == NULL ||
colormap == NULL ||
phase.rows < 1 ||
phase.cols < 1 ||
phase.type() != CV_64F ||
phase.channels() != 1)
{
fprintf(stderr, "savephase(): input check failed!\n\n");
return -1;
}
bool gray = false;
cv::ColormapTypes type = cv::COLORMAP_PARULA;
if (strcmp(colormap, "jet") == 0) type = cv::COLORMAP_JET;
if (strcmp(colormap, "hsv") == 0) type = cv::COLORMAP_HSV;
if (strcmp(colormap, "cool") == 0) type = cv::COLORMAP_COOL;
if (strcmp(colormap, "rainbow") == 0) type = cv::COLORMAP_RAINBOW;
if (strcmp(colormap, "spring") == 0) type = cv::COLORMAP_SPRING;
if (strcmp(colormap, "summer") == 0) type = cv::COLORMAP_SUMMER;
if (strcmp(colormap, "winter") == 0) type = cv::COLORMAP_WINTER;
if (strcmp(colormap, "autumn") == 0) type = cv::COLORMAP_AUTUMN;
if (strcmp(colormap, "gray") == 0) gray = true;
double min, max;
Mat tmp;
phase.copyTo(tmp);
cv::minMaxLoc(tmp, &min, &max);
if (fabs(max - min) < 0.000001)
{
fprintf(stderr, "phase value is the same for every pixel\n\n");
return -1;
}
tmp = (tmp - min) / (max - min) * 255.0;
tmp.convertTo(tmp, CV_8U);
if (!gray)
{
cv::applyColorMap(tmp, tmp, type);
}
bool ret = cv::imwrite(filename, tmp);
if (!ret)
{
fprintf(stderr, "cv::imwrite(): can't write to %s\n\n", filename);
return -1;
}
return 0;
}
int Utils::resampling(const char* Src_file, const char* Dst_file, int dst_rows, int dst_cols)
{
if (Src_file == NULL ||
Dst_file == NULL ||
dst_rows < 1 ||
dst_cols < 1)
{
fprintf(stderr, "down_sampling(): input check failed!\n\n");
return -1;
}
Mat img = cv::imread(Src_file);
if (img.rows < 1 || img.cols < 1)
{
fprintf(stderr, "can't read from %s!\n\n", Dst_file);
return -1;
}
cv::resize(img, img, cv::Size(dst_cols, dst_rows));
if (cv::imwrite(Dst_file, img) == false)
{
fprintf(stderr, "failed to write %s\n\n", Dst_file);
return -1;
}
return 0;
}
int Utils::amplitude_phase_blend(const char* amplitude_file, const char* phase_file, const char* blended_file, double SAR_ratio)
{
if (amplitude_file == NULL ||
phase_file == NULL ||
blended_file == NULL
)
{
fprintf(stderr, "amplitude_phase_blend(): input check failed!\n\n");
return -1;
}
Mat amplitude = imread(amplitude_file);
Mat phase = imread(phase_file);
if (amplitude.rows < 1 ||
amplitude.cols < 1
)
{
fprintf(stderr, "amplitude_phase_blend(): can't open %s!\n\n", amplitude_file);
return -1;
}
if (phase.rows < 1 ||
phase.cols < 1
)
{
fprintf(stderr, "amplitude_phase_blend(): can't open %s!\n", phase_file);
return -1;
}
SAR_ratio = SAR_ratio < 0.5 ? 0.5 : SAR_ratio;
SAR_ratio = SAR_ratio > 0.99 ? 0.99 : SAR_ratio;
Mat blend;
addWeighted(amplitude, SAR_ratio, phase, 1.0 - SAR_ratio, 0, blend);
if (blend.rows < 1 || blend.cols < 1)
{
fprintf(stderr, "amplitude_phase_blend(): failed to blend !\n");
return -1;
}
if (!imwrite(blended_file, blend))
{
fprintf(stderr, "amplitude_phase_blend(): failed to write to %s !\n", blended_file);
return -1;
}
return 0;
}
int Utils::read_edges(const char* filename, tri_edge** edges, long* num_edges, int** neighbours, long num_nodes)
{
if (filename == NULL ||
num_edges == NULL ||
num_nodes < 3 ||
edges == NULL ||
neighbours == NULL)
{
fprintf(stderr, "read_edges(): input check failed!\n\n");
return -1;
}
FILE* fp = NULL;
fp = fopen(filename, "rt");
if (fp == NULL)
{
fprintf(stderr, "read_edges(): can't open %s\n", filename);
return -1;
}
char str[1024];
char* ptr;
fgets(str, 1024, fp);
*num_edges = strtol(str, &ptr, 0);
if (*num_edges <= 0)
{
fprintf(stderr, "read_edges(): %s is unknown format!\n", filename);
if (fp)
{
fclose(fp);
fp = NULL;
}
return -1;
}
*edges = (tri_edge*)malloc(*num_edges * sizeof(tri_edge));
if (*edges == NULL)
{
fprintf(stderr, "read_edges(): unreasonable number of edges, out of memory!\n");
if (fp)
{
fclose(fp);
fp = NULL;
}
return -1;
}
memset(*edges, 0, *num_edges * sizeof(tri_edge));
*neighbours = (int*)malloc(sizeof(int) * num_nodes);
if (*neighbours == NULL)
{
fprintf(stderr, "read_edges(): unreasonable number of nodes, out of memory!\n");
if (fp)
{
fclose(fp);
fp = NULL;
}
if (*edges)
{
free(*edges);
*edges = NULL;
}
return -1;
}
memset(*neighbours, 0, sizeof(int) * num_nodes);
long end1, end2, edges_number, boundry_marker;
for (int i = 0; i < *num_edges; i++)
{
fgets(str, 1024, fp);
edges_number = strtol(str, &ptr, 0);
end1 = strtol(ptr, &ptr, 0);
end2 = strtol(ptr, &ptr, 0);
boundry_marker = strtol(ptr, &ptr, 0);
(*edges + i)->end1 = end1;
(*edges + i)->end2 = end2;
(*edges + i)->num = i + 1;
(*edges + i)->gain = 0;
(*edges + i)->isResidueEdge = false;
(*edges + i)->isBoundry = (boundry_marker == 1);
if (end1 < 1 ||
end1 > num_nodes ||
end2 < 1 ||
end2 > num_nodes)
{
fprintf(stderr, "read_edges(): endpoints exceed 1~num_nodes!\n");
if (fp)
{
fclose(fp);
fp = NULL;
}
if (*edges)
{
free(*edges);
*edges = NULL;
}
if (*neighbours)
{
free(*neighbours);
*neighbours = NULL;
}
return -1;
}
*(*neighbours + end1 - 1) = *(*neighbours + end1 - 1) + 1;//统计每个节点有多少邻接边
*(*neighbours + end2 - 1) = *(*neighbours + end2 - 1) + 1;
}
if (fp)
{
fclose(fp);
fp = NULL;
}
return 0;
}
int Utils::read_edges(const char* edge_file, vector<tri_edge>& edges, std::vector<int>& node_neighbours, long num_nodes)
{
if (edge_file == NULL ||
num_nodes < 3)
{
fprintf(stderr, "read_edges(): input check failed!\n\n");
return -1;
}
FILE* fp = NULL;
fp = fopen(edge_file, "rt");
if (fp == NULL)
{
fprintf(stderr, "read_edges(): can't open %s\n", edge_file);
return -1;
}
char str[1024];
char* ptr;
fgets(str, 1024, fp);
long long num_edges = 0;
num_edges = strtol(str, &ptr, 0);
if (num_edges <= 0)
{
fprintf(stderr, "read_edges(): %s is unknown format!\n", edge_file);
if (fp)
{
fclose(fp);
fp = NULL;
}
return -1;
}
edges.clear(); node_neighbours.clear();
edges.resize(num_edges);
node_neighbours.resize(num_nodes);
long end1, end2, edges_number, boundry_marker;
for (int i = 0; i < num_edges; i++)
{
fgets(str, 1024, fp);
edges_number = strtol(str, &ptr, 0);
end1 = strtol(ptr, &ptr, 0);
end2 = strtol(ptr, &ptr, 0);
boundry_marker = strtol(ptr, &ptr, 0);
edges[i].end1 = end1;
edges[i].end2 = end2;
edges[i].num = i + 1;
edges[i].gain = 0;
edges[i].isResidueEdge = false;
edges[i].phase_diff = 0.0;
edges[i].isBoundry = (boundry_marker == 1);
if (end1 < 1 ||
end1 > num_nodes ||
end2 < 1 ||
end2 > num_nodes)
{
fprintf(stderr, "read_edges(): endpoints exceed 1~num_nodes!\n");
if (fp)
{
fclose(fp);
fp = NULL;
}
return -1;
}
node_neighbours[end1 - 1] += 1;//统计每个节点有多少邻接边
node_neighbours[end2 - 1] += 1;//统计每个节点有多少邻接边
}
if (fp)
{
fclose(fp);
fp = NULL;
}
return 0;
}
int Utils::init_tri_node(vector<tri_node>& node_array, Mat& phase, Mat& mask, tri_edge* edges, long num_edges, int* num_neighbour, int num_nodes)
{
if (phase.rows < 2 ||
phase.cols < 2 ||
phase.channels() != 1 ||
phase.type() != CV_64F ||
mask.rows != phase.rows ||
mask.cols != phase.cols ||
mask.channels() != 1 ||
mask.type() != CV_32S ||
edges == NULL ||
num_edges < 3 ||
num_neighbour == NULL ||
num_nodes < 3)
{
fprintf(stderr, "init_tri_node(): input check failed!\n\n");
return -1;
}
int sum = cv::countNonZero(mask);;
if (sum != num_nodes)
{
fprintf(stderr, "init_tri_node(): mask and num_nodes mismatch!\n\n");
return -1;
}
int rows = phase.rows;
int cols = phase.cols;
int count = 0;
tri_node* ptr = NULL;
double Phase;
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < cols; j++)
{
if (mask.at<int>(i, j) > 0)
{
Phase = phase.at<double>(i, j);
ptr = new tri_node(i, j, *(num_neighbour + count), Phase);
if (mask.at<int>(i, j) > 1)//邻接已解缠节点标记
{
ptr->set_status(true);
}
node_array.push_back(*ptr);
delete ptr;
ptr = NULL;
count++;
}
}
}
long* neighbour_ptr = NULL;
int dummy, ret;
tri_edge tmp;
for (int i = 0; i < num_edges; i++)
{
tmp = *(edges + i);
if (tmp.end1 < 0 ||
tmp.end2 < 0 ||
tmp.end1 > node_array.size() ||
tmp.end2 > node_array.size())
{
fprintf(stderr, "init_tri_node(): edges' endpoint exceed legal value!\n\n");
return -1;
}
ret = node_array[tmp.end1 - 1].get_neigh_ptr(&neighbour_ptr, &dummy);
if (return_check(ret, "tri_node::get_neigh_ptr(*, *)", error_head)) return -1;
while (neighbour_ptr != NULL && *neighbour_ptr != -1)
{
neighbour_ptr = neighbour_ptr + 1;
}
*neighbour_ptr = i + 1;
ret = node_array[tmp.end2 - 1].get_neigh_ptr(&neighbour_ptr, &dummy);
if (return_check(ret, "tri_node::get_neigh_ptr(*, *)", error_head)) return -1;
while (neighbour_ptr != NULL && *neighbour_ptr != -1)
{
neighbour_ptr = neighbour_ptr + 1;
}
*neighbour_ptr = i + 1;
}
return 0;
}
int Utils::init_tri_node(
vector<tri_node>& node_array,
const Mat& phase,
const Mat& mask,
const vector<tri_edge>& edges,
const vector<int>& node_neighbours,
int num_nodes
)
{
if (phase.rows < 2 ||
phase.cols < 2 ||
phase.channels() != 1 ||
phase.type() != CV_64F ||
mask.rows != phase.rows ||
mask.cols != phase.cols ||
mask.channels() != 1 ||
mask.type() != CV_32S ||
edges.size() < 3 ||
(node_neighbours.size() - num_nodes) != 0 ||
num_nodes < 3)
{
fprintf(stderr, "init_tri_node(): input check failed!\n\n");
return -1;
}
int sum = cv::countNonZero(mask);;
if (sum != num_nodes)
{
fprintf(stderr, "init_tri_node(): mask and num_nodes mismatch!\n\n");
return -1;
}
long long num_edges = edges.size();
node_array.clear();
node_array.resize(num_nodes);
int rows = phase.rows;
int cols = phase.cols;
int count = 0;
tri_node* ptr = NULL;
double Phase;
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < cols; j++)
{
if (mask.at<int>(i, j) > 0)
{
Phase = phase.at<double>(i, j);
ptr = new tri_node(i, j, node_neighbours[count], Phase);
if (mask.at<int>(i, j) > 1)//邻接已解缠节点标记
{
ptr->set_status(true);
}
node_array[count] = *ptr;
delete ptr;
ptr = NULL;
count++;
}
}
}
long* neighbour_ptr = NULL;
int dummy, ret;
tri_edge tmp;
for (int i = 0; i < num_edges; i++)
{
tmp = edges[i];
if (tmp.end1 < 0 ||
tmp.end2 < 0 ||
tmp.end1 > node_array.size() ||
tmp.end2 > node_array.size())
{
fprintf(stderr, "init_tri_node(): edges' endpoint exceed legal value!\n\n");
return -1;
}
ret = node_array[tmp.end1 - 1].get_neigh_ptr(&neighbour_ptr, &dummy);
if (return_check(ret, "tri_node::get_neigh_ptr(*, *)", error_head)) return -1;
while (neighbour_ptr != NULL && *neighbour_ptr != -1)
{
neighbour_ptr = neighbour_ptr + 1;
}
*neighbour_ptr = i + 1;
ret = node_array[tmp.end2 - 1].get_neigh_ptr(&neighbour_ptr, &dummy);
if (return_check(ret, "tri_node::get_neigh_ptr(*, *)", error_head)) return -1;
while (neighbour_ptr != NULL && *neighbour_ptr != -1)
{
neighbour_ptr = neighbour_ptr + 1;
}
*neighbour_ptr = i + 1;
}
return 0;
}
int Utils::init_edge_phase_diff(vector<tri_edge>& edges, const vector<tri_node>& node_array)
{
if (edges.size() < 3 || node_array.size() < 3)
{
fprintf(stderr, "init_edge_phase_diff(): input check failed!\n");
return -1;
}
size_t num_nodes = node_array.size();
size_t num_edges = edges.size();
size_t end1, end2;
double phi1, phi2;
for (size_t i = 0; i < num_edges; i++)
{
end1 = edges[i].end1 < edges[i].end2 ? edges[i].end1 : edges[i].end2;
end2 = edges[i].end1 < edges[i].end2 ? edges[i].end2 : edges[i].end1;
node_array[end1 - 1].get_phase(&phi1);
node_array[end2 - 1].get_phase(&phi2);
phi1 = phi2 - phi1;
phi1 = atan2(sin(phi1), cos(phi1));
edges[i].phase_diff = phi1;
}
return 0;
}
int Utils::init_edges_quality(Mat& quality, tri_edge* edges, int num_edges, vector<tri_node>& nodes)
{
if (quality.rows < 2 ||
quality.cols < 2 ||
quality.type() != CV_64F ||
quality.channels() != 1 ||
edges == NULL ||
num_edges < 3 ||
nodes.size() < 3
)
{
fprintf(stderr, "init_edges_quality(): input check failed!\n\n");
return -1;
}
int rows, cols;
double qual = 0.0;
for (int i = 0; i < num_edges; i++)
{
qual = 0.0;
nodes[(edges + i)->end1 - 1].get_pos(&rows, &cols);
qual += quality.at<double>(rows, cols);
nodes[(edges + i)->end2 - 1].get_pos(&rows, &cols);
qual += quality.at<double>(rows, cols);
(edges + i)->quality = qual / 2.0;
}
return 0;
}
int Utils::init_edges_quality(const Mat& quality_map, vector<tri_edge>& edges, const vector<tri_node>& nodes)
{
if (quality_map.rows < 2 ||
quality_map.cols < 2 ||
quality_map.type() != CV_64F ||
quality_map.channels() != 1 ||
edges.size() < 3 ||
nodes.size() < 3
)
{
fprintf(stderr, "init_edges_quality(): input check failed!\n\n");
return -1;
}
int rows, cols;
double qual = 0.0;
size_t num_edges = edges.size();
for (int i = 0; i < num_edges; i++)
{
qual = 0.0;
nodes[edges[i].end1 - 1].get_pos(&rows, &cols);
qual += quality_map.at<double>(rows, cols);
nodes[edges[i].end2 - 1].get_pos(&rows, &cols);
qual += quality_map.at<double>(rows, cols);
edges[i].quality = qual / 2.0;
}
return 0;
}
int Utils::read_triangle(
const char* ele_file,
const char* neigh_file,
triangle** tri,
int* num_triangle,
vector<tri_node>& nodes,
tri_edge* edges,
int num_edges
)
{
if (ele_file == NULL ||
neigh_file == NULL ||
tri == NULL ||
num_triangle == NULL ||
nodes.size() < 3 ||
edges == NULL ||
num_edges < 3
)
{
fprintf(stderr, "read_triangle(): input check failed!\n\n");
return -1;
}
FILE* fp_ele, * fp_neigh;
fp_ele = NULL;
fp_neigh = NULL;
fp_ele = fopen(ele_file, "rt");
if (fp_ele == NULL)
{
fprintf(stderr, "read_triangle(): can't open %s\n", ele_file);
return -1;
}
fp_neigh = fopen(neigh_file, "rt");
if (fp_neigh == NULL)
{
fprintf(stderr, "read_triangle(): can't open %s\n", neigh_file);
if (fp_ele)
{
fclose(fp_ele);
fp_ele = NULL;
}
return -1;
}
char str[INPUTMAXSIZE];
char* ptr;
fgets(str, INPUTMAXSIZE, fp_ele);
*num_triangle = strtol(str, &ptr, 0);
if (*num_triangle < 1)
{
fprintf(stderr, "read_triangle(): number of triangles exceed legal range!\n");
if (fp_ele)
{
fclose(fp_ele);
fp_ele = NULL;
}
if (fp_neigh)
{
fclose(fp_neigh);
fp_neigh = NULL;
}
return -1;
}
fgets(str, INPUTMAXSIZE, fp_neigh);
*tri = (triangle*)malloc(*num_triangle * sizeof(triangle));
if (*tri == NULL)
{
fprintf(stderr, "read_triangle(): out of memory!\n");
if (fp_ele)
{
fclose(fp_ele);
fp_ele = NULL;
}
if (fp_neigh)
{
fclose(fp_neigh);
fp_neigh = NULL;
}
return -1;
}
memset(*tri, 0, sizeof(triangle) * (*num_triangle));
int p1, p2, p3, neigh1, neigh2, neigh3, num1, num2;
for (int i = 0; i < *num_triangle; i++)
{
fgets(str, INPUTMAXSIZE, fp_ele);
num1 = strtol(str, &ptr, 0);
p1 = strtol(ptr, &ptr, 0);
p2 = strtol(ptr, &ptr, 0);
p3 = strtol(ptr, &ptr, 0);
fgets(str, INPUTMAXSIZE, fp_neigh);
num2 = strtol(str, &ptr, 0);
neigh1 = strtol(ptr, &ptr, 0);
neigh2 = strtol(ptr, &ptr, 0);
neigh3 = strtol(ptr, &ptr, 0);
(*tri + i)->p1 = p1;
(*tri + i)->p2 = p2;
(*tri + i)->p3 = p3;
(*tri + i)->neigh1 = neigh1;
(*tri + i)->neigh2 = neigh2;
(*tri + i)->neigh3 = neigh3;
(*tri + i)->num = num1;
}
if (fp_ele)
{
fclose(fp_ele);
fp_ele = NULL;
}
if (fp_neigh)
{
fclose(fp_neigh);
fp_neigh = NULL;
}
//获取三角形的边序号
long* ptr_neigh = NULL;
int num_neigh, count;
int edge[3];
memset(edge, 0, sizeof(int) * 3);
for (int j = 0; j < *num_triangle; j++)
{
count = 0;
nodes[(*tri + j)->p1 - 1].get_neigh_ptr(&ptr_neigh, &num_neigh);
for (int i = 0; i < num_neigh; i++)
{
if ((edges + *(ptr_neigh + i) - 1)->end1 == (*tri + j)->p2 ||
(edges + *(ptr_neigh + i) - 1)->end1 == (*tri + j)->p3 ||
(edges + *(ptr_neigh + i) - 1)->end2 == (*tri + j)->p2 ||
(edges + *(ptr_neigh + i) - 1)->end2 == (*tri + j)->p3
)
{
edge[count] = *(ptr_neigh + i);
count++;
}
}
nodes[(*tri + j)->p2 - 1].get_neigh_ptr(&ptr_neigh, &num_neigh);
for (int i = 0; i < num_neigh; i++)
{
if ((edges + *(ptr_neigh + i) - 1)->end1 == (*tri + j)->p3 ||
(edges + *(ptr_neigh + i) - 1)->end2 == (*tri + j)->p3)
{
edge[count] = *(ptr_neigh + i);
//count++;
}
}
(*tri + j)->edge1 = edge[0];
(*tri + j)->edge2 = edge[1];
(*tri + j)->edge3 = edge[2];
}
return 0;
}
int Utils::read_triangle(
const char* ele_file,
const char* neigh_file,
vector<triangle>& triangle,
vector<tri_node>& nodes,
vector<tri_edge>& edges
)
{
if (ele_file == NULL ||
neigh_file == NULL ||
nodes.size() < 3 ||
edges.size() < 3
)
{
fprintf(stderr, "read_triangle(): input check failed!\n\n");
return -1;
}
FILE* fp_ele, * fp_neigh;
fp_ele = NULL;
fp_neigh = NULL;
fp_ele = fopen(ele_file, "rt");
if (fp_ele == NULL)
{
fprintf(stderr, "read_triangle(): can't open %s\n", ele_file);
return -1;
}
fp_neigh = fopen(neigh_file, "rt");
if (fp_neigh == NULL)
{
fprintf(stderr, "read_triangle(): can't open %s\n", neigh_file);
if (fp_ele)
{
fclose(fp_ele);
fp_ele = NULL;
}
return -1;
}
char str[INPUTMAXSIZE];
char* ptr;
fgets(str, INPUTMAXSIZE, fp_ele);
long num_triangle = strtol(str, &ptr, 0);
if (num_triangle < 1)
{
fprintf(stderr, "read_triangle(): number of triangles exceed legal range!\n");
if (fp_ele)
{
fclose(fp_ele);
fp_ele = NULL;
}
if (fp_neigh)
{
fclose(fp_neigh);
fp_neigh = NULL;
}
return -1;
}
fgets(str, INPUTMAXSIZE, fp_neigh);
triangle.clear();
triangle.resize(num_triangle);
int p1, p2, p3, neigh1, neigh2, neigh3, num1, num2;
for (int i = 0; i < num_triangle; i++)
{
fgets(str, INPUTMAXSIZE, fp_ele);
num1 = strtol(str, &ptr, 0);
p1 = strtol(ptr, &ptr, 0);
p2 = strtol(ptr, &ptr, 0);
p3 = strtol(ptr, &ptr, 0);
fgets(str, INPUTMAXSIZE, fp_neigh);
num2 = strtol(str, &ptr, 0);
neigh1 = strtol(ptr, &ptr, 0);
neigh2 = strtol(ptr, &ptr, 0);
neigh3 = strtol(ptr, &ptr, 0);
triangle[i].p1 = p1;
triangle[i].p2 = p2;
triangle[i].p3 = p3;
triangle[i].neigh1 = neigh1;
triangle[i].neigh2 = neigh2;
triangle[i].neigh3 = neigh3;
triangle[i].num = num1;
}
if (fp_ele)
{
fclose(fp_ele);
fp_ele = NULL;
}
if (fp_neigh)
{
fclose(fp_neigh);
fp_neigh = NULL;
}
//获取三角形的边序号
long* ptr_neigh = NULL;
int num_neigh, count;
int edge[3];
memset(edge, 0, sizeof(int) * 3);
for (int j = 0; j < num_triangle; j++)
{
count = 0;
nodes[triangle[j].p1 - 1].get_neigh_ptr(&ptr_neigh, &num_neigh);
for (int i = 0; i < num_neigh; i++)
{
if ((edges[*(ptr_neigh + i) - 1].end1 == triangle[j].p2) ||
(edges[*(ptr_neigh + i) - 1].end1 == triangle[j].p3) ||
(edges[*(ptr_neigh + i) - 1].end2 == triangle[j].p2) ||
(edges[*(ptr_neigh + i) - 1].end2 == triangle[j].p3)
)
{
edge[count] = *(ptr_neigh + i);
count++;
}
}
nodes[triangle[j].p2 - 1].get_neigh_ptr(&ptr_neigh, &num_neigh);
for (int i = 0; i < num_neigh; i++)
{
if ((edges[*(ptr_neigh + i) - 1].end1 == triangle[j].p3) ||
(edges[*(ptr_neigh + i) - 1].end2 == triangle[j].p3))
{
edge[count] = *(ptr_neigh + i);
//count++;
}
}
triangle[j].edge1 = edge[0];
triangle[j].edge2 = edge[1];
triangle[j].edge3 = edge[2];
}
return 0;
}
//int Utils::gen_delaunay(const char* filename, const char* exe_path)
//{
// if (filename == NULL ||
// exe_path == NULL
// )
// {
// fprintf(stderr, "gen_delaunay(): input check failed!\n");
// return -1;
// }
// FILE* fp = NULL;
// fp = fopen(filename, "rt");
// if (!fp)
// {
// fprintf(stderr, "gen_delaunay(): can't open %s!\n", filename);
// return -1;
// }
// else
// {
// fclose(fp);
// fp = NULL;
// }
// USES_CONVERSION;
// LPWSTR szCommandLine = new TCHAR[256];
// wcscpy(szCommandLine, A2W(exe_path));
// wcscat(szCommandLine, L"\\delaunay.exe -en ");
// wcscat(szCommandLine, A2W(filename));
//
// STARTUPINFO si;
// PROCESS_INFORMATION p_i;
// ZeroMemory(&si, sizeof(si));
// si.cb = sizeof(si);
// ZeroMemory(&p_i, sizeof(p_i));
// si.dwFlags = STARTF_USESHOWWINDOW;
// si.wShowWindow = FALSE;
// BOOL bRet = ::CreateProcess(
// NULL, // 不在此指定可执行文件的文件名
// szCommandLine, // 命令行参数
// NULL, // 默认进程安全性
// NULL, // 默认线程安全性
// FALSE, // 指定当前进程内的句柄不可以被子进程继承
// CREATE_NEW_CONSOLE, // 为新进程创建一个新的控制台窗口
// NULL, // 使用本进程的环境变量
// NULL, // 使用本进程的驱动器和目录
// &si,
// &p_i);
// if (bRet)
// {
// HANDLE hd = CreateJobObjectA(NULL, "delaunay");
// if (hd)
// {
// JOBOBJECT_EXTENDED_LIMIT_INFORMATION extLimitInfo;
// extLimitInfo.BasicLimitInformation.LimitFlags = JOB_OBJECT_LIMIT_KILL_ON_JOB_CLOSE;
// BOOL retval = SetInformationJobObject(hd, JobObjectExtendedLimitInformation, &extLimitInfo, sizeof(extLimitInfo));
// if (retval)
// {
// if (p_i.hProcess)
// {
// retval = AssignProcessToJobObject(hd, p_i.hProcess);
// }
// }
// }
// WaitForSingleObject(p_i.hProcess, INFINITE);
// if (szCommandLine != NULL) delete[] szCommandLine;
// ::CloseHandle(p_i.hThread);
// ::CloseHandle(p_i.hProcess);
// }
// else
// {
// fprintf(stderr, "gen_triangle(): create triangle.exe process failed!\n\n");
// if (szCommandLine != NULL) delete[] szCommandLine;
// return -1;
// }
//
//
// return 0;
//}
int Utils::write_node_file(const char* filename, const Mat& mask)
{
if (filename == NULL ||
mask.rows < 2 ||
mask.cols < 2 ||
mask.channels() != 1 ||
mask.type() != CV_32S
)
{
fprintf(stderr, "write_node_file(): input check failed!\n\n");
return -1;
}
FILE* fp = NULL;
fp = fopen(filename, "wt");
if (fp == NULL)
{
fprintf(stderr, "write_node_file(): can't open %s\n", filename);
return -1;
}
int nonzero = cv::countNonZero(mask);
if (nonzero <= 0)
{
fprintf(stderr, "write_node_file(): no node exist!\n");
if (fp)
{
fclose(fp);
fp = NULL;
}
return -1;
}
int dim, attr1, attr2, count;
dim = 2;
attr1 = 0;
attr2 = 0;
fprintf(fp, "%d %d %d %d\n", nonzero, dim, attr1, attr2);
int rows = mask.rows;
int cols = mask.cols;
count = 1;
double x, y;
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < cols; j++)
{
if (mask.at<int>(i, j) > 0)
{
x = double(i + 1);
y = double(j + 1);
fprintf(fp, "%d %lf %lf\n", count, x, y);
count++;
}
}
}
if (fp)
{
fclose(fp);
fp = NULL;
}
return 0;
}
int Utils::PS_amp_dispersion(const vector<Mat>& amplitude, double thresh, Mat& mask)
{
if (
amplitude.size() < 3 ||
thresh < 0.0
)
{
fprintf(stderr, "PS_amp_dispersion(): input check failed!\n\n");
return -1;
}
if (amplitude[0].rows < 1 || amplitude[0].cols < 1 || amplitude[0].channels() != 1 || amplitude[0].type() != CV_64F)
{
fprintf(stderr, "PS_amp_dispersion(): input check failed!\n\n");
return -1;
}
int nr = amplitude[0].rows;
int nc = amplitude[0].cols;
int num_images = amplitude.size();
Mat tmp1 = Mat::zeros(nr, nc, CV_64F);
tmp1.copyTo(mask);
#pragma omp parallel for schedule(guided)
for (int i = 0; i < nr; i++)
{
double mean, tmp;
for (int j = 0; j < nc; j++)
{
mean = 0;
tmp = 0;
for (int k = 0; k < num_images; k++)
{
mean += amplitude[k].at<double>(i, j);
//mean += (amplitude + k)->at<double>(i, j);
}
mean = mean / num_images;
for (int m = 0; m < num_images; m++)
{
tmp += (amplitude[m].at<double>(i, j) - mean) * (amplitude[m].at<double>(i, j) - mean);
//tmp += ((amplitude + m)->at<double>(i, j) - mean) * ((amplitude + m)->at<double>(i, j) - mean);
}
tmp = sqrt(tmp / num_images);
if (mean < 1e-8) mean = 1e-8;
tmp = tmp / mean;
if (tmp <= thresh)
{
mask.at<double>(i, j) = 1.0;
}
}
}
return 0;
}
int Utils::butter_lowpass(int grid_size, int n_win, double low_pass_wavelength, Mat& lowpass)
{
if (grid_size < 3 ||
n_win < 3 ||
low_pass_wavelength < 1
)
{
fprintf(stderr, "butter_lowpass(): input check failed!\n\n");
return -1;
}
double freq0 = 1 / low_pass_wavelength;
double start = -(n_win) / grid_size / n_win / 2;
double interval = 1 / grid_size / n_win;
double end = (n_win - 2) / grid_size / n_win / 2;
Mat freq_i = Mat::zeros(1, n_win, CV_64F);
for (int i = 0; i < n_win; i++)
{
freq_i.at<double>(0, i) = start + i * interval;
}
freq_i = freq_i / freq0;
cv::pow(freq_i, 10, freq_i);
freq_i = freq_i + 1.0;
freq_i = 1 / freq_i;
Mat tmp;
cv::transpose(freq_i, tmp);
tmp = tmp * freq_i;
int ret = fftshift2(tmp);
if (return_check(ret, "fftshift2(*)", error_head)) return -1;
tmp.copyTo(lowpass);
//freq_i = -(n_win) / grid_size / n_win / 2:1 / grid_size / n_win : (n_win - 2) / grid_size / n_win / 2;
//butter_i = 1. / (1 + (freq_i / freq0). ^ (2 * 5));
//low_pass = butter_i'*butter_i;
// low_pass = fftshift(low_pass);
return 0;
}
int Utils::circshift(Mat& out, const cv::Point& delta)
{
Size sz = out.size();
if (sz.height <= 0 ||
sz.width <= 0
)
{
fprintf(stderr, "circshift(): input check failed!\n\n");
return -1;
}
if ((sz.height == 1 && sz.width == 1) ||
(delta.x == 0 && delta.y == 0)
)
{
return 0;
}
int x = delta.x;
int y = delta.y;
if (x > 0) x = x % sz.width;
if (y > 0) y = y % sz.height;
if (x < 0) x = x % sz.width + sz.width;
if (y < 0) y = y % sz.height + sz.height;
vector<Mat> planes;
split(out, planes);
for (int i = 0; i < planes.size(); i++)
{
Mat tmp0, tmp1, tmp2, tmp3;
Mat q0(planes[i], Rect(0, 0, sz.width, sz.height - y));
Mat q1(planes[i], Rect(0, sz.height - y, sz.width, y));
q0.copyTo(tmp0);
q1.copyTo(tmp1);
tmp0.copyTo(planes[i](Rect(0, y, sz.width, sz.height - y)));
tmp1.copyTo(planes[i](Rect(0, 0, sz.width, y)));
Mat q2(planes[i], Rect(0, 0, sz.width - x, sz.height));
Mat q3(planes[i], Rect(sz.width - x, 0, x, sz.height));
q2.copyTo(tmp2);
q3.copyTo(tmp3);
tmp2.copyTo(planes[i](Rect(x, 0, sz.width - x, sz.height)));
tmp3.copyTo(planes[i](Rect(0, 0, x, sz.height)));
}
merge(planes, out);
return 0;
}
int Utils::fftshift2(Mat& out)
{
Size sz = out.size();
Point pt(0, 0);
pt.x = (int)floor(sz.width / 2.0);
pt.y = (int)floor(sz.height / 2.0);
int ret = circshift(out, pt);
if (return_check(ret, "circshift(*)", error_head)) return -1;
return 0;
}
int Utils::ifftshift(Mat& out)
{
Size sz = out.size();
Point pt(0, 0);
pt.x = (int)ceil(sz.width / 2.0);
pt.y = (int)ceil(sz.height / 2.0);
int ret = circshift(out, pt);
if (return_check(ret, "circshift(*)", error_head)) return -1;
return 0;
}
int Utils::fft2(Mat& Src, Mat& Dst)
{
if (Src.rows < 1 ||
Src.cols < 1 ||
Src.channels() != 1 ||
Src.type() != CV_64F)
{
fprintf(stderr, "fft2(): input check failed!\n\n");
return -1;
}
Mat planes[] = { Mat_<double>(Src), Mat::zeros(Src.size(), CV_64F) };
Mat complexImg;
merge(planes, 2, complexImg);
dft(complexImg, Dst, DFT_COMPLEX_OUTPUT);
return 0;
}
int Utils::fft2(ComplexMat& src, ComplexMat& Dst)
{
if (src.GetCols() < 1 ||
src.GetRows() < 1 ||
src.type() != CV_64F
)
{
fprintf(stderr, "fft2(): input check failed!\n\n");
return -1;
}
Mat re, im;
src.GetIm().copyTo(im);
src.GetRe().copyTo(re);
Mat planes[] = { re, im };
Mat complexImg;
merge(planes, 2, complexImg);
dft(complexImg, complexImg, DFT_COMPLEX_INPUT);
split(complexImg, planes);
Dst.SetRe(planes[0]);
Dst.SetIm(planes[1]);
return 0;
}
int Utils::ifft2(ComplexMat& src, ComplexMat& dst)
{
if (src.GetCols() < 1 ||
src.GetRows() < 1 ||
src.type() != CV_64F
)
{
fprintf(stderr, "ifft2(): input check failed!\n\n");
return -1;
}
Mat re, im;
im = src.GetIm();
re = src.GetRe();
Mat planes[] = { re, im };
Mat complexImg;
merge(planes, 2, complexImg);
idft(complexImg, complexImg, DFT_COMPLEX_OUTPUT);
split(complexImg, planes);
dst.SetRe(planes[0]);
dst.SetIm(planes[1]);
return 0;
}
int Utils::std(const Mat& input, double* std)
{
if (input.rows < 1 ||
input.cols < 1 ||
input.channels() != 1 ||
input.type() != CV_64F ||
std == NULL
)
{
fprintf(stderr, "std(): input check failed!\n\n");
return -1;
}
Mat data;
double mean_v = cv::mean(input)[0];
data = input - mean_v;
data = data.mul(data);
double sum_v = cv::sum(data)[0];
int x = data.rows * data.cols - 1;
if (x > 0)
{
*std = sqrt(sum_v / double(x));
}
else
{
*std = 0.0;
}
return 0;
}
int Utils::PS_deflat(
vector<Mat>& interf_phase,
Mat& interf_combination,
vector<Mat>& pos,
vector<Mat>& gcps,
Mat& start_row,
Mat& start_col,
int mode,
double lambda
)
{
if (interf_phase.size() < 5 ||
gcps.size() != pos.size() ||
gcps.size() < 5 ||
interf_combination.channels() != 1 ||
interf_combination.type() != CV_32S ||
interf_combination.cols != 2 ||
start_row.rows != start_col.rows ||
start_row.cols != start_col.cols ||
//start_row.rows != gcps.size() ||
start_col.cols != 1 ||
start_col.channels() != 1 ||
start_row.channels() != 1 ||
start_col.type() != CV_32S ||
start_row.type() != CV_32S ||
mode < 1 ||
mode > 2 ||
lambda <= 0.0
)
{
fprintf(stderr, "PS_deflat(): input check failed!\n\n");
return -1;
}
int n_images = pos.size();
int n_interf = interf_phase.size();
if (n_interf != interf_combination.rows ||
start_row.rows != n_images
)
{
fprintf(stderr, "PS_deflat(): parameter check failed!\n\n");
return -1;
}
volatile bool parallel_flag = true;
#pragma omp parallel for schedule(guided)
for (int i = 0; i < n_interf; i++)
{
if (!parallel_flag) continue;
Mat GCPS, POS1, POS2, phase;
int row_start, col_start, master_ix, slave_ix, ret;
master_ix = interf_combination.at<int>(i, 0);
slave_ix = interf_combination.at<int>(i, 1);
if (master_ix < 1 ||
master_ix > n_images ||
slave_ix < 1 ||
slave_ix > n_images
)
{
fprintf(stderr, "PS_deflat(): image index out of range!\n");
parallel_flag = false;
continue;
}
GCPS = gcps[master_ix - 1];
POS1 = pos[master_ix - 1];
POS2 = pos[slave_ix - 1];
phase = interf_phase[i];
row_start = start_row.at<int>(master_ix - 1, 0);
col_start = start_col.at<int>(slave_ix - 1, 0);
ret = _PS_deflat(phase, POS1, POS2, GCPS, 1, 1, mode, lambda);
if (ret < 0)
{
parallel_flag = false;
continue;
}
interf_phase[i] = phase;
}
if (parallel_check(parallel_flag, "PS_deflat()", parallel_error_head)) return -1;
return 0;
}
int Utils::_PS_deflat(
Mat& phase,
Mat& pos1,
Mat& pos2,
Mat& gcps,
int start_row,
int start_col,
int mode,
double lambda
)
{
if (
phase.rows < 1 ||
phase.cols < 1 ||
phase.channels() != 1 ||
phase.type() != CV_64F ||
pos1.rows < phase.rows ||
pos1.cols != 6 ||
pos1.channels() != 1 ||
pos1.type() != CV_64F ||
pos2.rows < phase.rows ||
pos2.cols != 6 ||
pos2.channels() != 1 ||
pos2.type() != CV_64F ||
gcps.channels() != 1 ||
gcps.type() != CV_64F ||
gcps.cols != 5 ||
gcps.rows < 4 ||
start_col < 1 ||
start_row < 1 ||
start_row > pos1.rows ||
mode > 2 ||
mode < 1 ||
lambda <= 0.0
)
{
fprintf(stderr, "_PS_deflat(): input check failed!\n\n");
return -1;
}
double C = 4.0 * PI;
if (mode == 1)
{
C = 4.0 * PI;
}
else
{
C = 2.0 * PI;
}
int ret;
int num_gcps = gcps.rows;
Mat R_M = Mat::zeros(num_gcps, 1, CV_64F);
Mat R_S = Mat::zeros(num_gcps, 1, CV_64F);
/*计算每个地面控制点的斜距*/
#pragma omp parallel for schedule(guided)
for (int j = 0; j < num_gcps; j++)
{
Mat llh = Mat::zeros(1, 3, CV_64F);
Mat xyz0, range_sat_tar1, range_sat_tar2;
Mat fdcs1 = Mat::zeros(1, pos1.rows, CV_64F);
Mat fdcs2 = Mat::zeros(1, pos2.rows, CV_64F);
double range_sat_tar_norm1, range_sat_tar_norm2;
llh.at<double>(0, 0) = gcps.at<double>(j, 0);
llh.at<double>(0, 1) = gcps.at<double>(j, 1);
llh.at<double>(0, 2) = gcps.at<double>(j, 2);
ell2xyz(llh, xyz0);
Mat xyz1 = Mat::zeros(pos1.rows, 3, CV_64F);
Mat xyz2 = Mat::zeros(pos2.rows, 3, CV_64F);
for (int k = 0; k < xyz1.rows; k++)
{
xyz0.copyTo(xyz1(Range(k, k + 1), Range(0, 3)));
}
for (int k = 0; k < xyz2.rows; k++)
{
xyz0.copyTo(xyz2(Range(k, k + 1), Range(0, 3)));
}
range_sat_tar1 = xyz1 - pos1(Range(0, pos1.rows), Range(0, 3));
range_sat_tar2 = xyz2 - pos2(Range(0, pos2.rows), Range(0, 3));
for (int k = 0; k < range_sat_tar1.rows; k++)
{
range_sat_tar1(Range(k, k + 1), Range(0, 3)).copyTo(xyz1);
range_sat_tar_norm1 = sqrt(sum(xyz1.mul(xyz1))[0]);
transpose(xyz1, xyz1);
xyz1 = 2.0 * pos1(Range(k, k + 1), Range(3, 6)) * xyz1 / lambda / (range_sat_tar_norm1 + 1e-12);
fdcs1.at<double>(0, k) = xyz1.at<double>(0, 0);
}
for (int k = 0; k < range_sat_tar2.rows; k++)
{
range_sat_tar2(Range(k, k + 1), Range(0, 3)).copyTo(xyz1);
range_sat_tar_norm2 = sqrt(sum(xyz1.mul(xyz1))[0]);
transpose(xyz1, xyz1);
xyz1 = 2.0 * pos2(Range(k, k + 1), Range(3, 6)) * xyz1 / lambda / (range_sat_tar_norm2 + 1e-12);
fdcs2.at<double>(0, k) = xyz1.at<double>(0, 0);
}
Point p1, p2;
fdcs1 = abs(fdcs1);
fdcs2 = abs(fdcs2);
minMaxLoc(fdcs1, NULL, NULL, &p1, NULL);
minMaxLoc(fdcs2, NULL, NULL, &p2, NULL);
Mat Sat_pos_M, Sat_pos_S;
pos1(Range(p1.x, p1.x + 1), Range(0, 3)).copyTo(Sat_pos_M);
pos2(Range(p2.x, p2.x + 1), Range(0, 3)).copyTo(Sat_pos_S);
Mat Slantrange_M = xyz0 - Sat_pos_M;
Mat Slantrange_S = xyz0 - Sat_pos_S;
R_M.at<double>(j, 0) = sqrt(sum(Slantrange_M.mul(Slantrange_M))[0]);
R_S.at<double>(j, 0) = sqrt(sum(Slantrange_S.mul(Slantrange_S))[0]);
}
Mat A = Mat::zeros(num_gcps, 3, CV_64F);
for (int j = 0; j < num_gcps; j++)
{
A.at<double>(j, 0) = 1.0;
A.at<double>(j, 1) = gcps.at<double>(j, 3);
A.at<double>(j, 2) = gcps.at<double>(j, 4);
}
Mat A_t;
transpose(A, A_t);
A = A_t * A;
Mat b = A_t * (R_M - R_S);
Mat x;
if (!solve(A, b, x, DECOMP_LU))
{
fprintf(stderr, "_PS_deflat(): can't solve least square problem!\n");
return -1;
}
Mat flat_phase = Mat::zeros(phase.rows, phase.cols, CV_64F);
int nr = phase.rows;
int nc = phase.cols;
#pragma omp parallel for schedule(guided)
for (int j = 0; j < nr; j++)
{
for (int k = 0; k < nc; k++)
{
double xx = C * (x.at<double>(0, 0) + (double(j) + double(start_row)) * x.at<double>(1, 0) +
(double(k) + double(start_col)) * x.at<double>(2, 0)) / lambda;
phase.at<double>(j, k) = phase.at<double>(j, k) + xx;
}
}
wrap(phase, phase);
return 0;
}
int Utils::stateVec_interp(Mat& stateVec, double time_interval, Mat& stateVec_interp)
{
if (stateVec.empty() ||
stateVec.cols != 7 ||
stateVec.rows < 7 ||
time_interval < 0.0)
{
fprintf(stderr, "stateVec_interp(): input check failed!\n");
return -1;
}
Mat statevec;
if (stateVec.type() != CV_64F) stateVec.convertTo(statevec, CV_64F);
else stateVec.copyTo(statevec);
int rows = statevec.rows; int cols = statevec.cols;
Mat time; statevec(cv::Range(0, rows), cv::Range(0, 1)).copyTo(time);
time = time - time.at<double>(0, 0);
Mat A = Mat::ones(rows, 6, CV_64F);
Mat temp, b;
//拟合x
Mat x; statevec(cv::Range(0, rows), cv::Range(1, 2)).copyTo(x);
time.copyTo(A(cv::Range(0, rows), cv::Range(1, 2)));
temp = time.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(2, 3)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(3, 4)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(4, 5)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(5, 6)));
transpose(A, temp);
b = temp * x;
A = temp * A;
if (!cv::solve(A, b, x, cv::DECOMP_NORMAL))
{
fprintf(stderr, "stateVec_interp(): matrix defficiency!\n");
return -1;
}
//拟合y
A = Mat::ones(rows, 6, CV_64F);
Mat y; statevec(cv::Range(0, rows), cv::Range(2, 3)).copyTo(y);
time.copyTo(A(cv::Range(0, rows), cv::Range(1, 2)));
temp = time.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(2, 3)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(3, 4)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(4, 5)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(5, 6)));
transpose(A, temp);
b = temp * y;
A = temp * A;
if (!cv::solve(A, b, y, cv::DECOMP_NORMAL))
{
fprintf(stderr, "stateVec_interp(): matrix defficiency!\n");
return -1;
}
//拟合z
A = Mat::ones(rows, 6, CV_64F);
Mat z; statevec(cv::Range(0, rows), cv::Range(3, 4)).copyTo(z);
time.copyTo(A(cv::Range(0, rows), cv::Range(1, 2)));
temp = time.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(2, 3)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(3, 4)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(4, 5)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(5, 6)));
transpose(A, temp);
b = temp * z;
A = temp * A;
if (!cv::solve(A, b, z, cv::DECOMP_NORMAL))
{
fprintf(stderr, "stateVec_interp(): matrix defficiency!\n");
return -1;
}
//拟合vx
A = Mat::ones(rows, 6, CV_64F);
Mat vx; statevec(cv::Range(0, rows), cv::Range(4, 5)).copyTo(vx);
time.copyTo(A(cv::Range(0, rows), cv::Range(1, 2)));
temp = time.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(2, 3)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(3, 4)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(4, 5)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(5, 6)));
transpose(A, temp);
b = temp * vx;
A = temp * A;
if (!cv::solve(A, b, vx, cv::DECOMP_NORMAL))
{
fprintf(stderr, "stateVec_interp(): matrix defficiency!\n");
return -1;
}
//拟合vy
A = Mat::ones(rows, 6, CV_64F);
Mat vy; statevec(cv::Range(0, rows), cv::Range(5, 6)).copyTo(vy);
time.copyTo(A(cv::Range(0, rows), cv::Range(1, 2)));
temp = time.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(2, 3)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(3, 4)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(4, 5)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(5, 6)));
transpose(A, temp);
b = temp * vy;
A = temp * A;
if (!cv::solve(A, b, vy, cv::DECOMP_NORMAL))
{
fprintf(stderr, "stateVec_interp(): matrix defficiency!\n");
return -1;
}
//拟合vz
A = Mat::ones(rows, 6, CV_64F);
Mat vz; statevec(cv::Range(0, rows), cv::Range(6, 7)).copyTo(vz);
time.copyTo(A(cv::Range(0, rows), cv::Range(1, 2)));
temp = time.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(2, 3)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(3, 4)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(4, 5)));
temp = temp.mul(time);
temp.copyTo(A(cv::Range(0, rows), cv::Range(5, 6)));
transpose(A, temp);
b = temp * vz;
A = temp * A;
if (!cv::solve(A, b, vz, cv::DECOMP_NORMAL))
{
fprintf(stderr, "stateVec_interp(): matrix defficiency!\n");
return -1;
}
//插值
int count = 1;
double t = 0;
while (t <= time.at<double>(rows - 1, 0))
{
count++;
t += time_interval;
}
stateVec_interp.create(count, 7, CV_64F);
Mat tt = Mat::ones(count, 6, CV_64F);
tt(cv::Range(0, count), cv::Range(0, 1)).copyTo(stateVec_interp(cv::Range(0, count), cv::Range(0, 1)));
t = 0.0;
for (int i = 0; i < count; i++)
{
tt.at<double>(i, 1) = t;
tt.at<double>(i, 2) = t * t;
tt.at<double>(i, 3) = t * t * t;
tt.at<double>(i, 4) = t * t * t * t;
tt.at<double>(i, 5) = t * t * t * t * t;
t += time_interval;
}
x = tt * x;
y = tt * y;
z = tt * z;
vx = tt * vx;
vy = tt * vy;
vz = tt * vz;
x.copyTo(stateVec_interp(cv::Range(0, count), cv::Range(1, 2)));
y.copyTo(stateVec_interp(cv::Range(0, count), cv::Range(2, 3)));
z.copyTo(stateVec_interp(cv::Range(0, count), cv::Range(3, 4)));
vx.copyTo(stateVec_interp(cv::Range(0, count), cv::Range(4, 5)));
vy.copyTo(stateVec_interp(cv::Range(0, count), cv::Range(5, 6)));
vz.copyTo(stateVec_interp(cv::Range(0, count), cv::Range(6, 7)));
return 0;
}
int Utils::coord_conversion(Mat& coefficient, Mat& coord_in_1, Mat& coord_in_2, Mat& coord_out)
{
if (coefficient.cols != 32 ||
coefficient.rows != 1 ||
coefficient.type() != CV_64F ||
coord_in_1.empty() ||
coord_in_2.empty() ||
coord_in_1.type() != CV_64F ||
coord_in_2.type() != CV_64F ||
coord_in_1.rows != coord_in_2.rows ||
coord_in_1.cols != coord_in_2.cols)
{
fprintf(stderr, "coord_conversion(): input check failed!\n");
return -1;
}
double offset_out, scale_out, offset_in_1, offset_in_2, scale_in_1, scale_in_2;
double a0, a1, a2, a3, a4, a5, a6, a7, a8, a9, a10, a11,
a12, a13, a14, a15, a16, a17, a18, a19, a20, a21, a22, a23, a24;
offset_out = coefficient.at<double>(0, 0);
scale_out = coefficient.at<double>(0, 1);
offset_in_1 = coefficient.at<double>(0, 2);
scale_in_1 = coefficient.at<double>(0, 3);
offset_in_2 = coefficient.at<double>(0, 4);
scale_in_2 = coefficient.at<double>(0, 5);
a0 = coefficient.at<double>(0, 6);
a1 = coefficient.at<double>(0, 7);
a2 = coefficient.at<double>(0, 8);
a3 = coefficient.at<double>(0, 9);
a4 = coefficient.at<double>(0, 10);
a5 = coefficient.at<double>(0, 11);
a6 = coefficient.at<double>(0, 12);
a7 = coefficient.at<double>(0, 13);
a8 = coefficient.at<double>(0, 14);
a9 = coefficient.at<double>(0, 15);
a10 = coefficient.at<double>(0, 16);
a11 = coefficient.at<double>(0, 17);
a12 = coefficient.at<double>(0, 18);
a13 = coefficient.at<double>(0, 19);
a14 = coefficient.at<double>(0, 20);
a15 = coefficient.at<double>(0, 21);
a16 = coefficient.at<double>(0, 22);
a17 = coefficient.at<double>(0, 23);
a18 = coefficient.at<double>(0, 24);
a19 = coefficient.at<double>(0, 25);
a20 = coefficient.at<double>(0, 26);
a21 = coefficient.at<double>(0, 27);
a22 = coefficient.at<double>(0, 28);
a23 = coefficient.at<double>(0, 29);
a24 = coefficient.at<double>(0, 30);
int rows = coord_in_1.rows; int cols = coord_in_1.cols;
Mat coord_out1(rows, cols, CV_64F);
#pragma omp parallel for schedule(guided)
for (int i = 0; i < rows; i++)
{
double in1, in2, out;
for (int j = 0; j < cols; j++)
{
in1 = (coord_in_1.at<double>(i, j) - offset_in_1) / scale_in_1;
in2 = (coord_in_2.at<double>(i, j) - offset_in_2) / scale_in_2;
out = a0 + a1 * in1 + a2 * in1 * in1 + a3 * in1 * in1 * in1 + a4 * in1 * in1 * in1 * in1 +
a5 * in2 + a6 * in2 * in1 + a7 * in2 * in1 * in1 + a8 * in2 * in1 * in1 * in1 + a9 * in2 * in1 * in1 * in1 * in1 +
a10 * in2 * in2 + a11 * in2 * in2 * in1 + a12 * in2 * in2 * in1 * in1 + a13 * in2 * in2 * in1 * in1 * in1 + a14 * in2 * in2 * in1 * in1 * in1 * in1 +
a15 * in2 * in2 * in2 + a16 * in2 * in2 * in2 * in1 + a17 * in2 * in2 * in2 * in1 * in1 + a18 * in2 * in2 * in2 * in1 * in1 * in1 + a19 * in2 * in2 * in2 * in1 * in1 * in1 * in1 +
a20 * in2 * in2 * in2 * in2 + a21 * in2 * in2 * in2 * in2 * in1 + a22 * in2 * in2 * in2 * in2 * in1 * in1 + a23 * in2 * in2 * in2 * in2 * in1 * in1 * in1 + a24 * in2 * in2 * in2 * in2 * in1 * in1 * in1 * in1;
out = out * scale_out + offset_out;
coord_out1.at<double>(i, j) = out;
}
}
coord_out1.copyTo(coord_out);
return 0;
}
int Utils::homogeneous_test(const Mat& pixel1, const Mat& pixel2, int* homo_flag, double alpha, const char* method)
{
if (pixel1.cols != 1 ||
pixel1.rows < 5 ||
pixel1.type() != CV_64F ||
pixel1.rows != pixel2.rows ||
pixel1.cols != pixel2.cols ||
pixel2.type() != CV_64F ||
homo_flag == NULL ||
method == NULL
)
{
fprintf(stderr, "homogeneous_test(): input check failed!\n");
return -1;
}
//Kolmogorov-Smirnov检验
/*
alpha 0.20 0.15 0.10 0.05 0.025 0.01 0.005 0.001
c(alpha) 1.073 1.138 1.224 1.358 1.48 1.628 1.731 1.949
*/
if (strcmp(method, "KS") == 0)
{
Mat p1, p2, cdf1, cdf2;
double thresh;
pixel1.copyTo(p1); pixel2.copyTo(p2);
int N = p1.rows;
cv::sort(p1, p1, cv::SORT_EVERY_COLUMN + cv::SORT_ASCENDING);
cv::sort(p2, p2, cv::SORT_EVERY_COLUMN + cv::SORT_ASCENDING);
if (p1.at<double>(N - 2, 0) <= p2.at<double>(0, 0) || p2.at<double>(N - 2, 0) <= p1.at<double>(0, 0))
{
*homo_flag = -1;
return 0;
}
//确定threshold
if (fabs(alpha - 0.2) < 0.01)
{
thresh = sqrt(2 / (double)N) * 1.073;
}
else if (fabs(alpha - 0.15) < 0.0001)
{
thresh = sqrt(2 / (double)N) * 1.138;
}
else if (fabs(alpha - 0.1) < 0.0001)
{
thresh = sqrt(2 / (double)N) * 1.224;
}
else if (fabs(alpha - 0.05) < 0.0001)
{
thresh = sqrt(2 / (double)N) * 1.358;
}
else if (fabs(alpha - 0.025) < 0.0001)
{
thresh = sqrt(2 / (double)N) * 1.48;
}
else if (fabs(alpha - 0.01) < 0.0001)
{
thresh = sqrt(2 / (double)N) * 1.628;
}
else if (fabs(alpha - 0.005) < 0.0001)
{
thresh = sqrt(2 / (double)N) * 1.731;
}
else if (fabs(alpha - 0.001) < 0.0001)
{
thresh = sqrt(2 / (double)N) * 1.949;
}
else
{
thresh = sqrt(2 / (double)N) * 1.358;
}
//计算C.D.F最大间距
double Dmax = 0.0, tmp;
int front_1 = 0, front_2 = 0;
if (p1.at<double>(0, 0) > p2.at<double>(0, 0))
{
for (int i = 0; i < N - 1; i++)
{
if (p2.at<double>(i, 0) <= p1.at<double>(0, 0) && p2.at<double>(i + 1, 0) >= p1.at<double>(0, 0))
{
front_2 = i;
break;
}
}
}
else
{
for (int i = 0; i < N - 1; i++)
{
if (p1.at<double>(i, 0) <= p2.at<double>(0, 0) && p1.at<double>(i + 1, 0) >= p2.at<double>(0, 0))
{
front_1 = i;
break;
}
}
}
while (front_1 < N && front_2 < N)
{
tmp = fabs((double)front_1 / (double)N - (double)front_2 / (double)N);
Dmax = Dmax > tmp ? Dmax : tmp;
if (front_1 >= N - 1 || front_2 >= N - 1)
{
break;
}
if (p1.at<double>(front_1 + 1, 0) < p2.at<double>(front_2 + 1, 0)) front_1++;
else if (p1.at<double>(front_1 + 1, 0) > p2.at<double>(front_2 + 1, 0)) front_2++;
else
{
front_1++; front_2++;
}
}
if (Dmax > thresh) *homo_flag = -1;
else *homo_flag = 0;
}
//Anderson-Darling 检验
else if (strcmp(method, "AD") == 0)
{
/*
alpha = 0.01, AD_inf = 3.857;
alpha = 0.05, AD_inf = 2.492;
alpha = 0.1, AD_inf = 1.933;
*/
Mat p1, p2, p;
double thresh;
pixel1.copyTo(p1); pixel2.copyTo(p2);
cv::vconcat(p1, p2, p);
int n = p1.rows; int N = 2 * n;
cv::sort(p1, p1, cv::SORT_EVERY_COLUMN + cv::SORT_ASCENDING);
cv::sort(p2, p2, cv::SORT_EVERY_COLUMN + cv::SORT_ASCENDING);
cv::sort(p, p, cv::SORT_EVERY_COLUMN + cv::SORT_ASCENDING);
if (fabs(alpha - 0.05) < 0.0001)
{
thresh = (2.492 - 1) * (1 - 1.55 / (double)N) + 1;
}
else if (fabs(alpha - 0.01) < 0.0001)
{
thresh = (3.857 - 1) * (1 - 1.55 / (double)N) + 1;
}
else
{
thresh = (1.933 - 1) * (1 - 1.55 / (double)N) + 1;
}
int c = 0; double sum = 0.0, sentinel = -1.0;
for (int i = 1; i < N; i++)
{
while (c <= n - 1)
{
if (p.at<double>(i - 1, 0) <= p1.at<double>(c, 0)) break;
c++;
}
sum += double((N * c - n * i) * (N * c - n * i)) / double(i * (N - i));
}
sum /= (double)(n * n);
if (sum > thresh) *homo_flag = -1;
else *homo_flag = 0;
}
return 0;
}
int Utils::coherence_matrix_estimation(const vector<ComplexMat>& slc_series, ComplexMat& coherence_matrix, int est_window_width, int est_window_height, int ref_row, int ref_col, bool b_homogeneous_test, bool b_normalize)
{
if (slc_series.size() < 5 ||
est_window_width < 3 ||
est_window_height < 3 ||
est_window_height % 2 != 1 ||
est_window_width % 2 != 1 ||
ref_col < 0 ||
ref_row < 0
)
{
fprintf(stderr, "coherence_estimation(): input check failed!\n");
return -1;
}
if (slc_series[0].type() != CV_64F || slc_series[0].isempty() || ref_row > slc_series[0].GetRows() - 1 || ref_col > slc_series[0].GetCols() - 1
)
{
fprintf(stderr, "coherence_estimation(): input check failed!\n");
return -1;
}
int n_images = slc_series.size(), ret;
int rows = slc_series[0].GetRows(); int cols = slc_series[0].GetCols();
int radius_width = (est_window_width - 1) / 2;
int radius_height = (est_window_height - 1) / 2;
int left, right, bottom, top;
left = (ref_col - radius_width) < 0 ? 0 : (ref_col - radius_width);
right = (ref_col + radius_width) > cols - 1 ? cols - 1 : (ref_col + radius_width);
bottom = (ref_row + radius_height) > rows - 1 ? rows - 1 : (ref_row + radius_height);
top = (ref_row - radius_height) < 0 ? 0 : (ref_row - radius_height);
rows = bottom - top + 1;
cols = right - left + 1;
if (b_homogeneous_test)
{
//统计同质检验
ComplexMat pix1(n_images, 1); ComplexMat pix2(n_images, 1);
Mat pix1_amp, pix2_amp;
Mat mask = Mat::zeros(rows, cols, CV_32S);
mask.at<int>(ref_row - top, ref_col - left) = 1;
int b_homo, count = 1;
for (int i = 0; i < n_images; i++)
{
pix1.re.at<double>(i, 0) = slc_series[i].re.at<double>(ref_row, ref_col);
pix1.im.at<double>(i, 0) = slc_series[i].im.at<double>(ref_row, ref_col);
}
pix1_amp = pix1.GetMod();
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < cols; j++)
{
if (i == (ref_row - top) && j == (ref_col - left)) continue;
for (int k = 0; k < n_images; k++)
{
pix2.re.at<double>(k, 0) = slc_series[k].re.at<double>(i + top, j + left);
pix2.im.at<double>(k, 0) = slc_series[k].im.at<double>(i + top, j + left);
}
pix2_amp = pix2.GetMod();
ret = homogeneous_test(pix1_amp, pix2_amp, &b_homo, 0.1);
//ret = homogeneous_test(pix1_amp, pix2_amp, &b_homo, 0.1, "AD");
if (return_check(ret, "homogeneous_test()", error_head)) return -1;
if (b_homo == 0) { mask.at<int>(i, j) = 1; count++; }
}
}
//Mat c; mask.convertTo(c, CV_64F);
//cvmat2bin("E:\\working_dir\\projects\\software\\InSAR\\bin\\mask.bin", c);
if (count < 2)
{
//fprintf(stderr, "coherence_matrix_estimation(): no homogenous pixels inside estimation window!\n");
return -1;
}
//估计相关矩阵
int count2 = count; count = 0;
ComplexMat Covariance;
Mat sum(n_images, 1, CV_64F), A(n_images, count2, CV_64F), B(n_images, count2, CV_64F), C, A_t, B_t;
double s;
for (int k = 0; k < n_images; k++)
{
s = 0.0;
count = 0;
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < cols; j++)
{
if (mask.at<int>(i, j) > 0)
{
A.at<double>(k, count) = slc_series[k].re.at<double>(i + top, j + left);
B.at<double>(k, count) = slc_series[k].im.at<double>(i + top, j + left);
count++;
s += A.at<double>(k, count - 1) * A.at<double>(k, count - 1)
+ B.at<double>(k, count - 1) * B.at<double>(k, count - 1);
}
}
}
sum.at<double>(k, 0) = s;
}
cv::transpose(A, A_t); cv::transpose(B, B_t);
C = A * A_t + B * B_t;
C.copyTo(Covariance.re);
C = B * A_t - A * B_t;
C.copyTo(Covariance.im);
double denum;
if (b_normalize)
{
for (int i = 0; i < n_images; i++)
{
for (int j = 0; j < n_images; j++)
{
denum = sqrt(sum.at<double>(i, 0) * sum.at<double>(j, 0));
Covariance.re.at<double>(i, j) = Covariance.re.at<double>(i, j) / (denum + 1e-10);
Covariance.im.at<double>(i, j) = Covariance.im.at<double>(i, j) / (denum + 1e-10);
}
}
}
else
{
Covariance = Covariance * (1 / (double)count2);
}
coherence_matrix = Covariance;
}
else
{
}
return 0;
}
int Utils::unwrap_region_growing(
vector<tri_node>& nodes,
const vector<tri_edge>& edges,
size_t start_edge,
double distance_thresh,
double quality_thresh
)
{
if (nodes.size() < 3 ||
edges.size() < 3 ||
start_edge < 1 ||
start_edge > edges.size()
)
{
fprintf(stderr, "unwrap_region_growing(): input check failed!\n\n");
return -1;
}
if (distance_thresh < 1.0) distance_thresh = 1.0;
if (quality_thresh > 0.9) quality_thresh = 0.9;
//找到增量积分起始点
int ix = 0;
double MC = -1.0;
size_t num_edges = edges.size();
//for (int i = 0; i < num_edges; i++)
//{
// if (edges[i].MC > MC)
// {
// ix = i;
// MC = edges[i].MC;
// }
//}
size_t start = edges[start_edge - 1].end1;
//采用类似质量图法解缠的算法进行增量积分集成
edge_index tmp;
priority_queue<edge_index> que;
//nodes[start - 1].set_vel(0.0);//起始点形变速率和高程误差设置为0,后续可根据参考点进行校正
//nodes[start - 1].set_height(0.0);
nodes[start - 1].set_status(true);
long* ptr_neigh = NULL;
int num_neigh, end2, number, row1, col1, row2, col2;
double distance, phase, MC_total, phase_total, delta_phase;
nodes[start - 1].get_neigh_ptr(&ptr_neigh, &num_neigh);
for (int i = 0; i < num_neigh; i++)
{
end2 = edges[*(ptr_neigh + i) - 1].end1 == start ? edges[*(ptr_neigh + i) - 1].end2 : edges[*(ptr_neigh + i) - 1].end1;
nodes[start - 1].get_distance(nodes[end2 - 1], &distance);
if (!nodes[end2 - 1].get_status() &&
distance <= distance_thresh &&
edges[*(ptr_neigh + i) - 1].quality > quality_thresh
)
{
tmp.num = *(ptr_neigh + i);
tmp.quality = -edges[*(ptr_neigh + i) - 1].quality;
que.push(tmp);
}
}
while (que.size() != 0)
{
tmp = que.top();
que.pop();
if (nodes[edges[tmp.num - 1].end1 - 1].get_status())
{
number = edges[tmp.num - 1].end1;
end2 = edges[tmp.num - 1].end2;
}
else
{
number = edges[tmp.num - 1].end2;
end2 = edges[tmp.num - 1].end1;
}
MC_total = 1e-10;
phase_total = 0.0;
if (!nodes[end2 - 1].get_status())
{
nodes[end2 - 1].get_pos(&row2, &col2);
nodes[end2 - 1].get_neigh_ptr(&ptr_neigh, &num_neigh);
for (int i = 0; i < num_neigh; i++)
{
number = edges[*(ptr_neigh + i) - 1].end1 == end2 ? edges[*(ptr_neigh + i) - 1].end2 : edges[*(ptr_neigh + i) - 1].end1;
if (nodes[number - 1].get_status())
{
nodes[number - 1].get_phase(&phase);
nodes[number - 1].get_pos(&row1, &col1);
if (row1 > row2)
{
delta_phase = -edges[*(ptr_neigh + i) - 1].phase_diff;
}
if (row1 < row2)
{
delta_phase = edges[*(ptr_neigh + i) - 1].phase_diff;
}
if (row1 == row2)
{
if (col1 > col2)
{
delta_phase = -edges[*(ptr_neigh + i) - 1].phase_diff;
}
else
{
delta_phase = edges[*(ptr_neigh + i) - 1].phase_diff;
}
}
phase_total += (delta_phase + phase) * edges[*(ptr_neigh + i) - 1].quality;
MC_total += edges[*(ptr_neigh + i) - 1].quality;
}
}
nodes[end2 - 1].set_phase(phase_total / MC_total);
nodes[end2 - 1].set_status(true);
nodes[end2 - 1].get_neigh_ptr(&ptr_neigh, &num_neigh);
number = end2;
for (int i = 0; i < num_neigh; i++)
{
end2 = edges[*(ptr_neigh + i) - 1].end1 == number ? edges[*(ptr_neigh + i) - 1].end2 : edges[*(ptr_neigh + i) - 1].end1;
nodes[number - 1].get_distance(nodes[end2 - 1], &distance);
if (!nodes[end2 - 1].get_status() &&
distance <= distance_thresh &&
edges[*(ptr_neigh + i) - 1].quality > quality_thresh
)
{
tmp.num = *(ptr_neigh + i);
tmp.quality = -edges[*(ptr_neigh + i) - 1].quality;
que.push(tmp);
}
}
}
}
return 0;
}
//int Utils::unwrap_3D(
// const Mat& mask,
// const vector<Mat>& quality_map,
// vector<Mat>& wrapped_phase_series,
// vector<Mat>& unwrapped_phase_series,
// const char* delaunay_exe_path,
// const char* tmp_file_path,
// double distance_thresh,
// double quality_thresh
//)
//{
// if (mask.rows < 2 ||
// mask.cols < 2 ||
// mask.type() != CV_32S ||
// wrapped_phase_series.size() < 2 ||
// delaunay_exe_path == NULL ||
// tmp_file_path == NULL ||
// quality_map.size() != wrapped_phase_series.size()
// )
// {
// fprintf(stderr, "unwrap_3D(): input check failed!\n");
// return -1;
// }
//
// quality_thresh = quality_thresh > 1.0 ? 0.9 : quality_thresh;
// distance_thresh = distance_thresh < 1.0 ? 1.0 : distance_thresh;
//
// /*----------------------------------*/
// /* 时间维解缠 */
// /*----------------------------------*/
//
// /*
// * 利用mask生成delaunay三角网络
// */
// size_t nr = mask.rows;
// size_t nc = mask.cols;
// long num_nodes = cv::countNonZero(mask);
// if (num_nodes < 3)
// {
// fprintf(stderr, "unwrap_3D(): at least 3 nodes are needed!\n");
// return -1;
// }
// int ret;
// int n_images = wrapped_phase_series.size();
// for (size_t i = 0; i < n_images; i++)
// {
// if (quality_map[i].rows != nr || quality_map[i].cols != nc)
// {
// fprintf(stderr, "unwrap_3D(): quality map size mismatch!\n");
// return -1;
// }
// if (wrapped_phase_series[i].rows != nr || wrapped_phase_series[i].cols != nc)
// {
// fprintf(stderr, "unwrap_3D(): wrapped phase size mismatch!\n");
// return -1;
// }
// }
// unwrapped_phase_series.resize(n_images);
// vector<tri_node> nodes; vector<vector<tri_node>> nodes_vec; nodes_vec.resize(n_images);
// vector<tri_edge> edges; vector<vector<tri_edge>> edges_vec; edges_vec.resize(n_images);
// vector<int> node_neighbour;
// string tmp_folder(tmp_file_path);
// string node_file = tmp_folder + "\\triangle.node";
// ret = write_node_file(node_file.c_str(), mask);
// if (return_check(ret, "write_node_file()", error_head)) return -1;
// ret = gen_delaunay(node_file.c_str(), delaunay_exe_path);
// if (return_check(ret, "gen_delaunay()", error_head)) return -1;
// string edge_file = tmp_folder + "\\triangle.1.edge";
// ret = read_edges(edge_file.c_str(), edges, node_neighbour, num_nodes);
// if (return_check(ret, "read_edges()", error_head)) return -1;
// for (int i = 0; i < n_images; i++)
// {
// ret = init_tri_node(nodes, wrapped_phase_series[i], mask, edges, node_neighbour, num_nodes);
// if (return_check(ret, "init_tri_node()", error_head)) return -1;
// ret = init_edge_phase_diff(edges, nodes);
// if (return_check(ret, "init_edge_phase_diff()", error_head)) return -1;
// ret = init_edges_quality(quality_map[i], edges, nodes);
// if (return_check(ret, "init_edges_quality()", error_head)) return -1;
// nodes_vec[i] = nodes;
// edges_vec[i] = edges;
// }
//
// /*
// * 一维高斯滤波
// */
//
// int Gaussian_radius = 2;
// double sigma = 1.0;
// Mat Gaussian_template = Mat::zeros(2 * Gaussian_radius + 1, 1, CV_64F);
// for (int i = 0; i < 2 * Gaussian_radius + 1; i++)
// {
// Gaussian_template.at<double>(i, 0) = exp(-(double(i - Gaussian_radius)) * (double(i - Gaussian_radius)) / (2.0 * sigma * sigma))
// / (sigma * sqrt(PI * 2.0));
// }
// size_t num_edges = edges.size();
//#pragma omp parallel for schedule(guided)
// for (long long i = 0; i < num_edges; i++)
// {
// Mat time_series = Mat::zeros(n_images, 1, CV_64F); Mat temp;
// for (size_t j = 0; j < n_images; j++)
// {
// time_series.at<double>(j, 0) = edges_vec[j][i].phase_diff;
// }
// cv::copyMakeBorder(time_series, time_series, Gaussian_radius, Gaussian_radius, 0, 0, cv::BORDER_REPLICATE);
// for (size_t j = Gaussian_radius; j < n_images + Gaussian_radius; j++)
// {
// time_series.at<double>(j, 0) = cv::sum(time_series(cv::Range(j - Gaussian_radius, j + Gaussian_radius + 1),
// cv::Range(0, 1)).mul(Gaussian_template))[0];
// }
// time_series(cv::Range(Gaussian_radius, n_images + Gaussian_radius), cv::Range(0, 1)).copyTo(temp);
//
// /*
// * 时间维解缠
// */
// Mat temp2; temp.copyTo(temp2);
// for (size_t j = 1; j < n_images; j++)
// {
// double tmp = temp.at<double>(j, 0) - temp.at<double>(j - 1, 0);
// tmp = atan2(sin(tmp), cos(tmp));
// temp2.at<double>(j, 0) = temp2.at<double>(j - 1, 0) + tmp;
// }
//
// for (size_t j = 0; j < n_images; j++)
// {
// edges_vec[j][i].phase_diff = temp2.at<double>(j, 0);
// }
// }
//
// /*----------------------------------*/
// /* 空间维解缠 */
// /*----------------------------------*/
//
// /*
// * 确定解缠起始点
// */
// double mean_quality, max_quality = -1.0;
// size_t ix_max;
// for (size_t i = 0; i < num_edges; i++)
// {
// mean_quality = 0.0;
// for (size_t j = 0; j < n_images; j++)
// {
// mean_quality += edges_vec[j][i].quality;
// }
// mean_quality /= (double)n_images;
// if (mean_quality > max_quality)
// {
// max_quality = mean_quality;
// ix_max = i;
// }
// }
// //#pragma omp parallel for schedule(guided)
// for (size_t i = 0; i < n_images; i++)
// {
// //vector<tri_node> nodes; vector<tri_edge>edges;
// int row, col; double phase;
// Mat unwrapped_phase;
// wrapped_phase_series[i].copyTo(unwrapped_phase);
// nodes = nodes_vec[i];
// edges = edges_vec[i];
// ret = unwrap_region_growing(nodes, edges, ix_max, distance_thresh, quality_thresh);
// if (return_check(ret, "unwrap_region_growing()", error_head)) return -1;
//
//
//
// /*
// * 从节点中取出解缠相位
// */
//
// for (size_t j = 0; j < num_nodes; j++)
// {
// if (nodes[j].get_status())
// {
// nodes[j].get_pos(&row, &col);
// nodes[j].get_phase(&phase);
// unwrapped_phase.at<double>(row, col) = phase;
// }
// }
// unwrapped_phase.copyTo(unwrapped_phase_series[i]);
// }
//
// /*----------------------------------*/
// /* 时间维再解缠 */
// /*----------------------------------*/
//
//
////#pragma omp parallel for schedule(guided)
//// for (int i = 0; i < nr; i++)
//// {
//// double tmp, tmp_old;
//// for (size_t j = 0; j < nc; j++)
//// {
//// if (mask.at<int>(i, j) > 0)
//// {
//// for (size_t k = 1; k < n_images; k++)
//// {
//// if (k == 1) tmp_old = unwrapped_phase_series[0].at<double>(i, j);
//// tmp = unwrapped_phase_series[k].at<double>(i, j) - tmp_old;
//// tmp = atan2(sin(tmp), cos(tmp));
//// tmp_old = unwrapped_phase_series[k].at<double>(i, j);
//// unwrapped_phase_series[k].at<double>(i, j) = unwrapped_phase_series[k - 1].at<double>(i, j) + tmp;
//// }
//// }
////
//// }
//// }
//
// return 0;
//}
//int Utils::unwrap_3D_mcf(
// const Mat& mask,
// const vector<Mat>& quality_map,
// vector<Mat>& wrapped_phase_series,
// vector<Mat>& unwrapped_phase_series,
// const char* delaunay_exe_path,
// const char* mcf_exe_path,
// const char* tmp_file_path,
// double distance_thresh
//)
//{
// if (mask.rows < 2 ||
// mask.cols < 2 ||
// mask.type() != CV_32S ||
// wrapped_phase_series.size() < 2 ||
// delaunay_exe_path == NULL ||
// tmp_file_path == NULL ||
// mcf_exe_path == NULL ||
// quality_map.size() != wrapped_phase_series.size()
// )
// {
// fprintf(stderr, "unwrap_3D_mcf(): input check failed!\n");
// return -1;
// }
//
// distance_thresh = distance_thresh < 1.0 ? 1.0 : distance_thresh;
//
// /*----------------------------------*/
// /* 时间维解缠 */
// /*----------------------------------*/
//
// /*
// * 利用mask生成delaunay三角网络
// */
// size_t nr = mask.rows;
// size_t nc = mask.cols;
// long num_nodes = cv::countNonZero(mask);
// if (num_nodes < 3)
// {
// fprintf(stderr, "unwrap_3D_mcf(): at least 3 nodes are needed!\n");
// return -1;
// }
// int ret;
// int n_images = wrapped_phase_series.size();
// for (size_t i = 0; i < n_images; i++)
// {
// if (quality_map[i].rows != nr || quality_map[i].cols != nc)
// {
// fprintf(stderr, "unwrap_3D_mcf(): quality map size mismatch!\n");
// return -1;
// }
// if (wrapped_phase_series[i].rows != nr || wrapped_phase_series[i].cols != nc)
// {
// fprintf(stderr, "unwrap_3D_mcf(): wrapped phase size mismatch!\n");
// return -1;
// }
// }
// Unwrap unwrap;
// unwrapped_phase_series.resize(n_images);
// vector<tri_node> nodes;
// vector<tri_edge> edges;
// vector<triangle> tri;
// vector<int> node_neighbour;
// Mat out_mask;
// string tmp_folder(tmp_file_path);
// string node_file = tmp_folder + "\\triangle.node";
// string ele_file = tmp_folder + "\\triangle.1.ele";
// string neigh_file = tmp_folder + "\\triangle.1.neigh";
// string mcf_problem = tmp_folder + "\\mcf_delaunay.net";
// string mcf_solution = tmp_folder + "\\mcf_delaunay.net.sol";
// string edge_file = tmp_folder + "\\triangle.1.edge";
// ret = write_node_file(node_file.c_str(), mask);
// if (return_check(ret, "write_node_file()", error_head)) return -1;
// ret = gen_delaunay(node_file.c_str(), delaunay_exe_path);
// if (return_check(ret, "gen_delaunay()", error_head)) return -1;
// ret = read_edges(edge_file.c_str(), edges, node_neighbour, num_nodes);
// if (return_check(ret, "read_edges()", error_head)) return -1;
// int num_triangle, positive = 0, negative = 0;
// size_t num_edges = edges.size();
// //先将起始点做时间维解缠
// int pos_row, pos_col; double tmp;
// ret = init_tri_node(nodes, wrapped_phase_series[0], mask, edges, node_neighbour, num_nodes);
// if (return_check(ret, "init_tri_node()", error_head)) return -1;
// nodes[199].get_pos(&pos_row, &pos_col);
// Mat time_series(n_images, 1, CV_64F);
// for (int i = 0; i < n_images; i++)
// {
// time_series.at<double>(i, 0) = wrapped_phase_series[i].at<double>(pos_row, pos_col);
// }
// for (int i = 1; i < n_images; i++)
// {
// tmp = time_series.at<double>(i, 0) - time_series.at<double>(i - 1, 0);
// wrapped_phase_series[i].at<double>(pos_row, pos_col) = time_series.at<double>(i - 1, 0) +
// atan2(sin(tmp), cos(tmp));
// }
//
// for (int i = 0; i < n_images; i++)
// {
// //将edges的gain清零
// for (size_t ii = 0; ii < num_edges; ii++)
// {
// edges[ii].gain = 0.0;
// }
// positive = 0, negative = 0;
// ret = init_tri_node(nodes, wrapped_phase_series[i], mask, edges, node_neighbour, num_nodes);
// if (return_check(ret, "init_tri_node()", error_head)) return -1;
// if (i == 0)
// {
// ret = read_triangle(ele_file.c_str(), neigh_file.c_str(), tri, nodes, edges);
// if (return_check(ret, "read_triangle()", error_head)) return -1;
// num_triangle = tri.size();
// }
// ret = residue(tri, nodes, edges, 10.0);
// if (return_check(ret, "residue()", error_head)) return -1;
// /*
// * 检查残差点数,若无残差点则不使用mcf.exe求解
// */
// for (int ii = 0; ii < num_triangle; ii++)
// {
// if (tri[ii].residue > 0.7)
// {
// positive++;
// }
// if (tri[ii].residue < -0.7)
// {
// negative++;
// }
// }
// if (positive == 0 && negative == 0)
// {
//
// ret = unwrap.MCF(wrapped_phase_series[i], unwrapped_phase_series[i], out_mask, mask, nodes, edges, 200, false, distance_thresh);
// if (return_check(ret, "unwrap.MCF()", error_head)) return -1;
// }
// else
// {
// ret = write_DIMACS(mcf_problem.c_str(), tri, nodes, edges, quality_map[i]);
// if (return_check(ret, "write_DIMACS()", error_head)) return -1;
// ret = unwrap.mcf_delaunay(mcf_problem.c_str(), mcf_exe_path);
// if (return_check(ret, "unwrap.mcf_delaunay()", error_head)) return -1;
// ret = read_DIMACS(mcf_solution.c_str(), edges, nodes, tri);
// if (return_check(ret, "read_DIMACS()", error_head)) return -1;
// ret = unwrap.MCF(wrapped_phase_series[i], unwrapped_phase_series[i], out_mask, mask, nodes, edges, 200, false, distance_thresh);
// if (return_check(ret, "unwrap.MCF()", error_head)) return -1;
// }
//
// }
// return 0;
//}
//int Utils::unwrap_3D_adaptive_tiling(
// const Mat& mask,
// const vector<Mat>& quality_map,
// vector<Mat>& wrapped_phase_series,
// vector<Mat>& unwrapped_phase_series,
// const char* delaunay_exe_path,
// const char* mcf_exe_path,
// const char* tmp_file_path,
// double distance_thresh,
// double quality_thresh
//)
//{
// if (mask.rows < 2 ||
// mask.cols < 2 ||
// mask.type() != CV_32S ||
// wrapped_phase_series.size() < 2 ||
// delaunay_exe_path == NULL ||
// tmp_file_path == NULL ||
// mcf_exe_path == NULL ||
// quality_map.size() != wrapped_phase_series.size() ||
// distance_thresh < 1.0 ||
// quality_thresh > 1.0
// )
// {
// fprintf(stderr, "unwrap_3D_adaptive_tiling(): input check failed!\n");
// return -1;
// }
//
// /*----------------------------------*/
// /* 自适应分块 */
// /*----------------------------------*/
//
// /*
// * 确定搜索范围半径
// */
// int r = (int)floor(distance_thresh), c, ret;
// Mat c_mat = Mat::zeros(2 * r + 1, 1, CV_32S);
// for (int i = 0; i < 2 * r + 1; i++)
// {
// c_mat.at<int>(i, 0) = (int)floor(sqrt(distance_thresh * distance_thresh - double(r - i) * double(r - i)));
// }
//
// Mat mask1, mask2; mask.copyTo(mask1);
// int nr = mask.rows; int nc = mask.cols;
// int n_images = wrapped_phase_series.size();
// size_t num_nodes = cv::countNonZero(mask);
// if (num_nodes < 3)
// {
// fprintf(stderr, "unwrap_3D_adaptive_tiling(): at least 3 nodes are needed!\n");
// return -1;
// }
// size_t node_count = 0;
// int block_count = 1, row, col, mask2_start_row = nr, mask2_end_row = -1, mask2_start_col = nc, mask2_end_col = -1;
// bool b_break;
// char str[4096];
// node_index node_ix, node_ix2;
// queue<node_index> que;
// vector<Mat> wrapped_phase, unwrapped_phase, qualitymap;
// wrapped_phase.resize(n_images);
// qualitymap.resize(n_images);
// unwrapped_phase_series.resize(n_images);
// for (int i = 0; i < n_images; i++)
// {
// wrapped_phase_series[i].copyTo(unwrapped_phase_series[i]);
// }
// while (node_count != num_nodes)
// {
// mask2_start_row = nr, mask2_end_row = -1, mask2_start_col = nc, mask2_end_col = -1;
// b_break = false;
// for (int i = 0; i < nr; i++)
// {
// for (int j = 0; j < nc; j++)
// {
// if (mask1.at<int>(i, j) == 1)
// {
// mask2_start_row = mask2_start_row > i ? i : mask2_start_row;
// mask2_end_row = mask2_end_row < i ? i : mask2_end_row;
// mask2_start_col = mask2_start_col > j ? j : mask2_start_col;
// mask2_end_col = mask2_end_col < j ? j : mask2_end_col;
//
// mask1.at<int>(i, j) += block_count; //标注已选点并将其加入到待处理队列中
// node_ix.row = i; node_ix.col = j;
// que.push(node_ix);
// b_break = true;
// break;
// }
// }
// if (b_break) break;
// }
//
// /*
// * 搜索满足条件的点,并加入队列
// */
//
// while (!que.empty())
// {
// node_ix = que.front();
// que.pop();
// node_count++;
//
// for (int i = 0; i <= 2 * r; i++)
// {
// c = c_mat.at<int>(i, 0);
// for (int j = 0; j <= 2 * c; j++)
// {
// row = node_ix.row + (i - r);
// row = row < 0 ? 0 : row; row = row > nr - 1 ? nr - 1 : row;
// col = node_ix.col + (j - c);
// col = col < 0 ? 0 : col; col = col > nc - 1 ? nc - 1 : col;
// if (mask1.at<int>(row, col) == 1)
// {
// mask2_start_row = mask2_start_row > row ? row : mask2_start_row;
// mask2_end_row = mask2_end_row < row ? row : mask2_end_row;
// mask2_start_col = mask2_start_col > col ? col : mask2_start_col;
// mask2_end_col = mask2_end_col < col ? col : mask2_end_col;
//
// mask1.at<int>(row, col) += block_count; //标注已选点
// node_ix2.row = row; node_ix2.col = col;
// que.push(node_ix2);
// }
// }
// }
// }
//
// /*
// * 确定新的掩膜矩阵mask2
// */
//
// mask2 = Mat::zeros(mask2_end_row - mask2_start_row + 1, mask2_end_col - mask2_start_col + 1, CV_32S);
//
// for (int i = mask2_start_row; i <= mask2_end_row; i++)
// {
// for (int j = mask2_start_col; j <= mask2_end_col; j++)
// {
// if (mask1.at<int>(i, j) == block_count + 1)
// {
// mask2.at<int>(i - mask2_start_row, j - mask2_start_col) = 1;
// }
// }
// }
// mask2.convertTo(mask2, CV_64F);
// cvmat2bin("E:\\working_dir\\projects\\software\\InSAR\\bin\\mask2.bin", mask2);
// mask2.convertTo(mask2, CV_32S);
// if (3 > cv::countNonZero(mask2))
// {
// block_count++;
// continue;
// }
//
// /*
// * 3D相位解缠
// */
//
// for (int i = 0; i < n_images; i++)
// {
// wrapped_phase_series[i](cv::Range(mask2_start_row, mask2_end_row + 1), cv::Range(mask2_start_col, mask2_end_col + 1)).copyTo
// (wrapped_phase[i]);
// quality_map[i](cv::Range(mask2_start_row, mask2_end_row + 1), cv::Range(mask2_start_col, mask2_end_col + 1)).copyTo
// (qualitymap[i]);
// }
//
// //ret = unwrap_3D(mask2, qualitymap, wrapped_phase, unwrapped_phase, delaunay_exe_path, tmp_file_path,
// // distance_thresh + 1.0, quality_thresh);
// ret = unwrap_3D_mcf(mask2, qualitymap, wrapped_phase, unwrapped_phase, delaunay_exe_path,
// mcf_exe_path, tmp_file_path, distance_thresh);
// if (return_check(ret, "unwrap_3D_mcf()", error_head)) return -1;
//
// for (int i = 0; i < n_images; i++)
// {
// unwrapped_phase[i].copyTo(unwrapped_phase_series[i](cv::Range(mask2_start_row, mask2_end_row + 1),
// cv::Range(mask2_start_col, mask2_end_col + 1)));
//
// memset(str, 0, 4096);
// sprintf(str, "H:\\data\\experiment\\test\\Regis2\\unwrapped_phase_%d.jpg", i + 1);
// //cvmat2bin(str, unwrapped_phase[i]);
// savephase(str, "jet", unwrapped_phase[i]);
// }
// block_count++;
//
// }
// mask1.convertTo(mask1, CV_64F);
// cvmat2bin("E:\\working_dir\\projects\\software\\InSAR\\bin\\mask1.bin", mask1);
// return 0;
//}
tri_node::tri_node()
{
this->rows = 0;
this->cols = 0;
this->num_neigh_edges = 0;
this->phase = 0;
this->b_unwrapped = false;
this->b_balanced = true;
this->neigh_edges = NULL;
this->b_residue = false;
this->epsilon_height = 0.0;
this->vel = 0.0;
//std::cout << "constructor1" << "\n";
}
tri_node::tri_node(const tri_node& node)
{
this->b_unwrapped = node.b_unwrapped;
this->b_balanced = node.b_balanced;
this->cols = node.cols;
this->b_residue = node.b_residue;
int num_node = node.num_neigh_edges <= 0 ? 1 : node.num_neigh_edges;
if (node.neigh_edges == NULL)
{
this->neigh_edges = NULL;
}
else
{
this->neigh_edges = (long*)malloc(sizeof(long) * num_node);
long* ptr = NULL;
int num;
node.get_neigh_ptr(&ptr, &num);
if (this->neigh_edges != NULL || num > 0 || ptr != NULL)
{
std::memcpy(this->neigh_edges, ptr, sizeof(long) * num_node);
}
}
this->num_neigh_edges = node.num_neigh_edges;
this->phase = node.phase;
this->rows = node.rows;
this->epsilon_height = node.epsilon_height;
this->vel = node.vel;
//std::cout << "constructor2" << "\n";
}
tri_node::tri_node(int row, int col, int num_neigh_edge, double phi)
{
this->rows = row;
this->cols = col;
this->num_neigh_edges = num_neigh_edge;
this->phase = phi;
this->b_unwrapped = false;
this->b_residue = false;
this->b_balanced = true;
this->epsilon_height = 0.0;
this->vel = 0.0;
if (num_neigh_edge > 0)
{
this->neigh_edges = (long*)malloc(sizeof(long) * num_neigh_edge);
}
else
{
this->neigh_edges = NULL;
}
if (this->neigh_edges != NULL)
{
for (int i = 0; i < num_neigh_edge; i++)
{
*(this->neigh_edges + i) = -1;//初始化邻接边序号都为-1
}
}
//std::cout << "constructor3" << "\n";
}
tri_node::~tri_node()
{
if (this->neigh_edges != NULL)
{
free(this->neigh_edges);
this->neigh_edges = NULL;
}
//std::cout << "destructor" << "\n";
}
tri_node tri_node::operator=(const tri_node& src)
{
if (src.neigh_edges == this->neigh_edges && this->neigh_edges != NULL)//两者相等
{
return *this;
}
else
{
if (this->neigh_edges)
{
free(this->neigh_edges);
this->neigh_edges = NULL;
}
if (src.num_neigh_edges > 0)
{
this->neigh_edges = (long*)malloc(src.num_neigh_edges * sizeof(long));
if (this->neigh_edges != NULL && src.neigh_edges != NULL)
{
memcpy(this->neigh_edges, src.neigh_edges, src.num_neigh_edges * sizeof(long));
}
}
this->b_balanced = src.b_balanced;
this->b_residue = src.b_residue;
this->b_unwrapped = src.b_unwrapped;
this->cols = src.cols;
this->rows = src.rows;
this->num_neigh_edges = src.num_neigh_edges;
this->phase = src.phase;
this->epsilon_height = src.epsilon_height;
this->vel = src.vel;
return *this;
}
}
int tri_node::get_phase(double* phi) const
{
if (phi == NULL)
{
fprintf(stderr, "get_phase(): input check failed!\n\n");
return -1;
}
*phi = this->phase;
return 0;
}
int tri_node::get_pos(int* rows, int* cols) const
{
if (rows == NULL ||
cols == NULL)
{
fprintf(stderr, "tri_node::get_pos(): input check failed!\n\n");
return -1;
}
*rows = this->rows;
*cols = this->cols;
return 0;
}
int tri_node::set_phase(double phi)
{
this->phase = phi;
return 0;
}
int tri_node::get_neigh_ptr(long** ptr2ptr, int* num) const
{
if (ptr2ptr == NULL || num == NULL)
{
fprintf(stderr, "get_neigh_ptr(): input check failed!\n\n");
return -1;
}
*ptr2ptr = this->neigh_edges;
*num = this->num_neigh_edges;
return 0;
}
int tri_node::set_status(bool b_unwrapped)
{
this->b_unwrapped = b_unwrapped;
return 0;
}
int tri_node::set_balance(bool b_balanced)
{
this->b_balanced = b_balanced;
return 0;
}
int tri_node::print_neighbour() const
{
if (this->num_neigh_edges <= 0)
{
fprintf(stdout, "no neighbour edges!\n");
return 0;
}
for (int i = 0; i < this->num_neigh_edges; i++)
{
fprintf(stdout, "%ld ", *(this->neigh_edges + i));
}
fprintf(stdout, "\n");
return 0;
}
int tri_node::get_num_neigh(int* num_neigh) const
{
*num_neigh = this->num_neigh_edges;
return 0;
}
int tri_node::get_distance(tri_node node, double* distance) const
{
*distance = sqrt(((double)node.rows - (double)this->rows) * ((double)node.rows - (double)this->rows) +
((double)node.cols - (double)this->cols) * ((double)node.cols - (double)this->cols));
return 0;
}
bool tri_node::get_status() const
{
return this->b_unwrapped;
}
bool tri_node::get_balance() const
{
return this->b_balanced;
}
bool tri_node::is_residue_node() const
{
return this->b_residue;
}
int tri_node::set_residue(bool b_res)
{
this->b_residue = b_res;
return 0;
}
double tri_node::get_vel() const
{
return this->vel;
}
double tri_node::get_height() const
{
return this->epsilon_height;
}
int tri_node::set_vel(double vel)
{
this->vel = vel;
return 0;
}
int tri_node::set_height(double height)
{
this->epsilon_height = height;
return 0;
}
6、需要使用的头文件
6.1:com_htzs_insar_jni_Registration.h
/* DO NOT EDIT THIS FILE - it is machine generated */
#include <jni.h>
/* Header for class com_htzs_insar_jni_Registration */
#ifndef _Included_com_htzs_insar_jni_Registration
#define _Included_com_htzs_insar_jni_Registration
#ifdef __cplusplus
extern "C" {
#endif
/*
* Class: com_htzs_insar_jni_Registration
* Method: calcOffset
* Signature: (I[S[S[S[S)Lcom/htzs/insar/jni/Point;
*/
JNIEXPORT jobject JNICALL Java_com_htzs_insar_jni_Registration_calcOffset
(JNIEnv *, jclass, jint, jshortArray, jshortArray, jshortArray, jshortArray);
/*
* Class: com_htzs_insar_jni_Registration
* Method: fitting
* Signature: ([Lcom/htzs/insar/jni/Point;[Lcom/htzs/insar/jni/Point;D)Lcom/htzs/insar/jni/Fit;
*/
JNIEXPORT jobject JNICALL Java_com_htzs_insar_jni_Registration_fitting
(JNIEnv *, jclass, jobjectArray, jobjectArray, jdouble);
/*
* Class: com_htzs_insar_jni_Registration
* Method: registration
* Signature: (I[S[SLcom/htzs/insar/jni/Point;Lcom/htzs/insar/jni/Fit;I)[S
*/
JNIEXPORT jshortArray JNICALL Java_com_htzs_insar_jni_Registration_registration
(JNIEnv *, jclass, jint, jshortArray, jshortArray, jobject, jobject, jint);
#ifdef __cplusplus
}
#endif
#endif
6.2:ComplexMat.h
#pragma once
#ifndef __COMPLEXMAT__H__
#define __COMPLEXMAT__H__
#include"opencv2/core/core.hpp"
#include"opencv2/highgui/highgui.hpp"
#include"opencv2/imgproc/imgproc.hpp"
#include"opencv2/opencv.hpp"
#include <omp.h> /*多线程计算库*/
using cv::Mat;
namespace InSAR {
class ComplexMat
{
public:
ComplexMat();
ComplexMat(Mat& real, Mat& imagine);
ComplexMat(int rows, int cols);
/*拷贝构造函数*/
ComplexMat(const ComplexMat& b);
~ComplexMat();
void SetRe(Mat& re);
void SetIm(Mat& im);
Mat GetRe() const;
Mat GetIm() const;
Mat GetMod() const;
/*计算复矩阵的相位*/
Mat GetPhase();
int type() const;
int GetRows() const;
int GetCols() const;
/*计算复数(共轭)点乘*/
int Mul(const ComplexMat& Src, ComplexMat& Dst, bool bConj) const;
/*计算复数乘积(点乘,elementwise)*/
ComplexMat operator*(const ComplexMat& b) const;
/*复数矩阵与实数矩阵对应相乘*/
ComplexMat operator*(const Mat& a) const;
/*复数矩阵乘以常数*/
ComplexMat operator*(const double& a) const;
/*取出部分复数矩阵*/
ComplexMat operator()(cv::Range _rowRange, cv::Range _colRange) const;
/*将复数矩阵部分进行赋值*/
int SetValue(cv::Range _rowRange, cv::Range _colRange, ComplexMat& src);
/*复数矩阵加法*/
ComplexMat operator+(const ComplexMat& b) const;
/*深拷贝赋值*/
ComplexMat operator=(const ComplexMat&);
/*复数矩阵内求和
* 参数1 求和方向(0为沿着每列求和,1为沿着每行求和)
*/
ComplexMat sum(int dim = 0) const;
/*求取复共轭*/
ComplexMat conj() const;
/*计算非零元素个数*/
int countNonzero() const;
/*数组是否为空*/
bool isempty()const;
/*转换类型*/
void convertTo(ComplexMat& out, int type) const;
Mat re;
Mat im;
private:
Mat mod;
Mat Phase;
};
}
#endif // !__COMPLEXMAT__H__
6.3:Registration.h
#pragma once
#ifndef __REGISTRATION__H__
#define __REGISTRATION__H__
#include"opencv2/core/core.hpp"
#include"opencv2/highgui/highgui.hpp"
#include"opencv2/imgproc/imgproc.hpp"
#include"opencv2/opencv.hpp"
#include <omp.h> /*多线程计算库*/
#include<vector>
#include"ComplexMat.h"
#include"Utils.h"
using cv::Mat;
using InSAR::ComplexMat;
namespace InSAR
{
class Registration
{
public:
Registration();
~Registration();
/*求取两幅辅图像的实相关函数
参数1 主图像(复)
参数2 辅图像(复)
参数3 行偏移量(返回值)
参数4 列偏移量(返回值)
*/
int real_coherent(ComplexMat& Master, ComplexMat& Slave, int* offset_row, int* offset_col);
/*2D FFTSHIFT(原地操作)*/
int fftshift2(Mat& matrix);
/*2D FFT
参数1 输入矩阵
参数2 输出矩阵
*/
int fft2(Mat& Src, Mat& Dst);
/*像元级配准(原地操作)
参数1 主图像(复)(输入值/返回值)
参数2 辅图像(复)(输入值/返回值)
参数3 行偏移量(返回值)
参数4 列偏移量(返回值)
*/
int registration_pixel(ComplexMat& Master, ComplexMat& Slave, int* move_r = NULL, int* move_c = NULL);
/*频域补零插值
参数1 输入矩阵(复)
参数2 输出矩阵(复)
参数3 插值倍数(大于1, 且是2的n次幂)
*/
int interp_paddingzero(ComplexMat& InputMatrix, ComplexMat& OutputMatrix, int interp_times);
/*立方插值
参数1 输入矩阵
参数2 输出矩阵
参数3 行偏移量
参数4 列偏移量
*/
int interp_cubic(ComplexMat& InputMatrix, ComplexMat& OutputMatrix, double offset_row, double offset_col);
/*立方插值
参数1 输入矩阵
参数2 输出矩阵
参数3 拟合系数
*/
int interp_cubic(ComplexMat& InputMatrix, ComplexMat& OutputMatrix, Mat& Coefficient);
/*计算每个像素的偏移量
参数1 像素行号
参数2 像素列号
参数3 拟合系数
参数4 行偏移量
参数5 列偏移量
*/
int every_subpixel_move(int i, int j, Mat& coefficient, double* offset_row, double* offset_col);
/*计算卷积核权重*/
double WeightCalculation(double offset);
/*亚像素级配准
参数1 主图像(复)
参数2 辅图像(复)
参数3 子块大小(大于1)
参数4 插值倍数(大于1)
*/
int registration_subpixel(ComplexMat& Master, ComplexMat& Slave, int blocksize, int interp_times);
/** @brief 精配准
@param master 主图像
@param slave 辅图像
@param blocksize 主图像参考块分块大小(blocksize×blocksize,blocksize为2的n次幂)
@param interp_times 插值倍数(InSAR要求至少8倍插值)
*/
int coregistration_subpixel(
ComplexMat& master,
ComplexMat& slave,
int blocksize,
int interp_times
);
/*拟合像素偏移量
参数1 行序列号
参数2 列序列号
参数3 行偏移量
参数4 列偏移量
参数5 拟合系数(返回值)
*/
int all_subpixel_move(Mat& Coordinate_x, Mat& Coordinate_y, Mat& offset_row, Mat& offset_col, Mat& para);
/*根据粗配准偏移量筛选控制点
* 参数1 原始图像行数
* 参数2 原始图像列数
* 参数3 行偏移
* 参数4 列偏移
* 参数5 控制点信息
*/
int gcps_sift(int rows, int cols, int move_rows, int move_cols, Mat& gcps);
private:
char error_head[256];
char parallel_error_head[256];
};
}
#endif // !__REGISTRATION__H__
6.4:Utils.h
#pragma once
#ifndef __UTILS__H__
#define __UTILS__H__
#include<fstream>
#include<iostream>
#include<vector>
#include<string>
#include"opencv2/core/core.hpp"
#include"opencv2/highgui/highgui.hpp"
#include"opencv2/imgproc/imgproc.hpp"
#include"opencv2/opencv.hpp"
#include <omp.h> /*多线程计算库*/
#include"ComplexMat.h"
#define INPUTMAXSIZE 1024
#define PI 3.141592653589793238
#define VEL_C 299792458.0
using cv::Mat;
using std::vector;
using std::string;
using InSAR::ComplexMat;
namespace InSAR
{
/*********************************************************/
/* Delaunay三角网 节点类 */
/*********************************************************/
class tri_node
{
public:
/*默认构造函数*/
tri_node();
/*拷贝构造函数*/
tri_node(const tri_node& node);
/*构造函数
* 参数1 节点行数
* 参数2 节点列数
* 参数3 节点邻接边数
* 参数4 节点相位
*/
tri_node(int, int, int, double);
~tri_node();
/*赋值函数(深拷贝赋值)*/
tri_node operator = (const tri_node& src);
/*获取节点相位
* 参数1 相位指针(返回值)
*/
int get_phase(double* phi) const;
/*获取节点行列坐标
* 参数1 行序号
* 参数2 列序号
*/
int get_pos(int* rows, int* cols) const;
/*节点相位赋值
* 参数1 输入相位
*/
int set_phase(double phi);
/*获取邻接边指针
* 参数1 指向邻接边指针的指针(返回值)
* 参数2 邻接边个数指针(返回值)
*/
int get_neigh_ptr(long** ptr2ptr, int* num) const;
/*改变解缠状态
* 参数1 是否已经解缠
*/
int set_status(bool b_unwrapped);
/*改变平衡状态
* 参数1 是否属于残差平衡三角形
*/
int set_balance(bool b_balanced);
/*打印邻接边序号
*
*/
int print_neighbour() const;
/*获取邻接边个数
* 参数1 邻接边个数指针
*/
int get_num_neigh(int* num_neigh) const;
/*获取与另一节点的距离
* 参数1 另一节点
* 参数2 距离
*/
int get_distance(tri_node node, double* distance) const;
/*获取解缠状态
* 返回值(是否已解缠)
*/
bool get_status() const;
/*获取平衡状态
* 返回值(是否平衡,默认是)
*/
bool get_balance() const;
/*返回是否节点属于残差三角形
*/
bool is_residue_node() const;
/*设置节点是否属于残差节点
*/
int set_residue(bool b_res);
/*获取形变速率*/
double get_vel() const;
/*获取高程误差*/
double get_height() const;
/*设置形变速率*/
int set_vel(double vel);
/*设置高程误差*/
int set_height(double height);
private:
/*****************InSAR处理变量*******************/
/*是否已解缠(默认未解缠)*/
bool b_unwrapped;
/*是否属于残差节点*/
bool b_residue;
/*是否属于平衡三角形的顶点(默认为是),同时在PS-InSAR中充当是否节点被丢弃的标志(为true表示不被丢弃, 为false表示被丢弃)*/
bool b_balanced;
/*节点行数(起始值为0)*/
int rows;
/*节点列数(起始值为0)*/
int cols;
/*节点邻接边数*/
int num_neigh_edges;
/*节点相位*/
double phase;
/*节点邻接边序号*/
long* neigh_edges;
/*****************PS-InSAR处理变量*******************/
/*形变速率*/
double vel;
/*高程误差*/
double epsilon_height;
};
/*********************************************************/
/* Delaunay三角网 三角形结构体 */
/*********************************************************/
struct triangle
{
/*三角形序号*/
int num;
/*点1*/
int p1;
/*点2*/
int p2;
/*点3*/
int p3;
/*三角形残差值*/
double residue;
/*相邻三角形序号1*/
int neigh1;
/*相邻三角形序号2*/
int neigh2;
/*相邻三角形序号3*/
int neigh3;
/*边1(从1开始)*/
int edge1;
/*边2(从1开始)*/
int edge2;
/*边3(从1开始)*/
int edge3;
/*默认构造函数*/
triangle()
{
num = p1 = p2 = p3 = neigh1 = neigh2 = neigh3 = edge1 = edge2 = edge3 = 0;
residue = 0.0;
}
/*拷贝构造函数*/
triangle(const triangle& cp)
{
this->edge1 = cp.edge1;
this->edge2 = cp.edge2;
this->edge3 = cp.edge3;
this->neigh1 = cp.neigh1;
this->neigh2 = cp.neigh2;
this->neigh3 = cp.neigh3;
this->num = cp.num;
this->p1 = cp.p1; this->p2 = cp.p2; this->p3 = cp.p3;
this->residue = cp.residue;
}
/*赋值(深拷贝)*/
triangle operator= (const triangle& cp)
{
this->edge1 = cp.edge1;
this->edge2 = cp.edge2;
this->edge3 = cp.edge3;
this->neigh1 = cp.neigh1;
this->neigh2 = cp.neigh2;
this->neigh3 = cp.neigh3;
this->num = cp.num;
this->p1 = cp.p1; this->p2 = cp.p2; this->p3 = cp.p3;
this->residue = cp.residue;
return *this;
}
};
/*********************************************************/
/* Delaunay三角网 三角形边结构体 */
/*********************************************************/
struct tri_edge
{
/**********InSAR变量**********/
/*积分增益(序号从小到大为正)*/
double gain;
/*相位质量(用于质量图法解缠)*/
double quality;
/*边序列号*/
int num;
/*端点1*/
int end1;
/*端点2*/
int end2;
/*残差边标志*/
bool isResidueEdge;
/*网络边界标志*/
bool isBoundry;
/**********PS_InSAR变量**********/
/*线性形变速度差系数(4 * pi / lambda * Ti)*/
//double coef_delta_vel;
/*高程误差系数(4 * pi * bperp_i / lambda / R_i / sin_theta_i )*/
//double coef_delta_height;
/*线性形变速度差(定义为大坐标 - 小坐标)*/
double delta_vel;
/*高程误差(定义为大坐标 - 小坐标)*/
double delta_height;
/*模型相干系数*/
double MC;
/*端点相位差(相位差定义为:大序号端点减小序号端点)*/
double phase_diff;
/*默认构造函数*/
tri_edge() {
gain = 0.0;
quality = 0.0;
num = 0;
end1 = 0; end2 = 0;
isResidueEdge = false;
isBoundry = false;
delta_vel = 0.0;
delta_height = 0.0; MC = 0.0; phase_diff = 0.0;
}
/*拷贝构造函数*/
tri_edge(const tri_edge& cp)
{
gain = cp.gain;
quality = cp.quality;
num = cp.num;
end1 = cp.end1; end2 = cp.end2;
isResidueEdge = cp.isResidueEdge;
isBoundry = cp.isBoundry;
delta_vel = cp.delta_vel;
delta_height = cp.delta_height; MC = cp.MC; phase_diff = cp.phase_diff;
}
/*赋值函数(深拷贝赋值)*/
tri_edge operator = (const tri_edge& cp)
{
gain = cp.gain;
quality = cp.quality;
num = cp.num;
end1 = cp.end1; end2 = cp.end2;
isResidueEdge = cp.isResidueEdge;
isBoundry = cp.isBoundry;
delta_vel = cp.delta_vel;
delta_height = cp.delta_height; MC = cp.MC; phase_diff = cp.phase_diff;
return *this;
}
};
/*********************************************************/
/* Delaunay三角网 三角形边序列号结构体 */
/*********************************************************/
struct edge_index
{
double quality;
int num;
edge_index() { num = 0; quality = 0.0; }
friend bool operator < (struct edge_index a, struct edge_index b)
{
return a.quality > b.quality;
}
};
/*-------------------------------------------------------*/
/* 规则网格节点结构体 */
/*-------------------------------------------------------*/
struct node_index
{
/*节点行数(从0开始)*/
int row;
/*节点列数(从0开始)*/
int col;
/*默认构造函数*/
node_index()
{
row = 0; col = 0;
}
/*拷贝构造函数*/
node_index(const node_index& cp)
{
this->row = cp.row; this->col = cp.col;
}
/*赋值函数*/
node_index operator = (const node_index& cp)
{
this->row = cp.row; this->col = cp.col;
return *this;
}
};
/*********************************************************/
/* 干涉SAR处理基本函数类库 */
/*********************************************************/
class Utils
{
public:
Utils();
~Utils();
/** @brief 求int型矩阵的众数
@param input 输入矩阵(int型)
@param out 输出结果
@return 成功返回0,否则返回-1
*/
int get_mode_index(const Mat& input, int* out);
/*计算矩阵梯度
参数1 源矩阵
参数2 行方向梯度(返回值)
参数3 列方向梯度(返回值)
参数4 是否补零使得梯度矩阵和源矩阵大小相同(默认补零)
*/
int diff(Mat& Src, Mat& diff_1, Mat& diff_2, bool same = true);
/*计算干涉相位
参数1 主图像(复)
参数2 辅图像(复)
参数3 干涉相位(返回值)
*/
int generate_phase(const ComplexMat& Master, const ComplexMat& Slave, Mat& phase);
/** @brief 最大似然相干估算器
@param master_image 主图像(复)
@param slave_image 辅图像(复)
@param coherence 相干系数(返回值)
@return 成功返回0,否则返回-1
*/
int real_coherence(ComplexMat& master_image, ComplexMat& slave_image, Mat& coherence);
/** @brief 最大似然相干估算器(带估计窗口尺寸接口)
@param master_image 主图像(复)
@param slave_image 辅图像(复)
@param est_wndsize_rg 估计窗口距离向尺寸(奇数)
@param est_wndsize_az 估计窗口方位向尺寸(奇数)
@param coherence 相干系数(返回值)
*/
int real_coherence(
const ComplexMat& master_image,
const ComplexMat& slave_image,
int est_wndsize_rg,
int est_wndsize_az,
Mat& coherence
);
/** @brief 频率无关相干估算器
@param master_image 主图像(复)
@param slave_image 辅图像(复)
@param coherence 相干系数(返回值)
@return 成功返回0,否则返回-1
*/
int complex_coherence(ComplexMat& master_image, ComplexMat& slave_image, Mat& coherence);
/** @brief 频率无关相干估算器(带估计窗口尺寸接口)
@param master_image 主图像
@param slave_image 辅图像
@param est_wndsize_rg 估计窗口距离向尺寸(奇数)
@param est_wndsize_az 估计窗口方位向尺寸(奇数)
@param coherence 相关系数(返回值)
@return 成功返回0,否则返回-1
*/
int complex_coherence(
const ComplexMat& master_image,
const ComplexMat& slave_image,
int est_wndsize_rg,
int est_wndsize_az,
Mat& coherence
);
/** @brief 根据干涉相位求相关系数
@param phase 输入相位
@param coherence 相关系数(返回值)
@return 成功返回0,否则返回-1
*/
int phase_coherence(Mat& phase, Mat& coherence);
/** @brief 根据干涉相位求相关系数(带估计窗口尺寸接口)
@param phase 输入相位
@param est_wndsize_rg 估计窗口距离向尺寸(奇数)
@param est_wndsize_az 估计窗口方位向尺寸(奇数)
@param coherence 相关系数(返回值)
@return 成功返回0,否则返回-1
*/
int phase_coherence(
const Mat& phase,
int est_wndsize_rg,
int est_wndsize_az,
Mat& coherence
);
/*求解相位导数方差
* 参数1 干涉相位
* 参数2 相位导数方差(返回值)
* 参数3 计算窗口大小(奇数)
*/
int phase_derivatives_variance(Mat& phase, Mat& phase_derivatives_variance, int wndsize = 3);
/*最大可积距离
* 参数1 原始相位
* 参数2 最大可积距离(返回值)
* 参数3 保守值(最大积分距离不能超过该值)
*/
int max_integrable_distance(Mat& phase, Mat& max_integrable_distance, double conservative_thresh = 20.0);
/*FFTSHIFT
参数1 待fftshift的矩阵(原地进行fftshift操作)
*/
int fftshift(Mat& matrix);
/*计算干涉相位图的残差值(点)
参数1 干涉相位
参数2 残差点矩阵(返回值)
*/
int residue(Mat& phase, Mat& residue);
/*计算Delaunay三角网络的残差值(并且标注残差边和残差节点,便于解缠时避开)
* 参数1 Delaunay三角网三角形结构体数组
* 参数2 Delaunay三角网三角形数量
* 参数3 Delaunay三角网节点数组
* 参数4 Delaunay三角网边结构体数组
* 参数5 Delaunay三角网边数量
*/
int residue(triangle* tri, int num_triangle, vector<tri_node>& nodes, tri_edge* edges, int num_edges);
/** @brief 计算Delaunay三角网络的残差值(并且标注残差边和残差节点)
@param triangle Delaunay三角网三角形结构体数组
@param nodes Delaunay三角网节点数组
@param edges Delaunay三角网边结构体数组
@param distance_thresh 边长度阈值(超过此阈值不参与残差点计算)
@return 成功返回0,否则返回-1
*/
int residue(
vector<triangle>& triangle,
vector<tri_node>& nodes,
vector<tri_edge>& edges,
double distance_thresh
);
/*计算mask(筛选高质量点)
* 参数1 相关系数矩阵
* 参数2 mask举矩阵(返回值)
* 参数3 窗口半径
* 参数4 阈值
*/
int gen_mask(Mat& coherence, Mat& mask, int wnd_size, double thresh);
/*计算mask(筛选高质量点)
* 参数1 相关系数矩阵
* 参数2 相位导数方差
* 参数3 mask举矩阵(返回值)
* 参数4 窗口半径
* 参数5 相关系数阈值
* 参数6 相位导数方差阈值
*/
int gen_mask(
Mat& coherence,
Mat& phase_derivatives,
Mat& mask, int wnd_size,
double coh_thresh,
double phase_derivative_thresh
);
/*根据设定阈值筛选残差点
* 参数1 原始残差点矩阵
* 参数2 筛选后残差点矩阵
* 参数3 筛选阈值(大于0)
* 参数4 残差点个数
*/
int residue_sift(Mat& residue_src, Mat& residue_dst, double thresh, long* num_residue);
/*缠绕相位至(-pi,pi)
参数1 待缠绕相位
参数2 缠绕后的相位(返回值)
*/
int wrap(Mat& Src, Mat& Dst);
/*按行或列累计积分
参数1 待积分数据
参数2 积分方向(dim = 1,按列计算 dim = 2,按行计算)
*/
int cumsum(Mat& phase, int dim);
/*叉乘运算(三维)
* 参数1 向量一(n * 3)
* 参数2 向量二(n * 3)
* 参数3 输出
*/
int cross(Mat& vec1, Mat& vec2, Mat& out);
/*写入DIMACS文件(描述最小费用问题)
参数1 目标文件名
参数2 残差点矩阵
参数3 相干系数矩阵
参数4 残差点阈值(大于0)
*/
int write_DIMACS(const char* DIMACS_file_problem, Mat& residue, Mat& coherence, double thresh);
/*写入DIMACS文件(描述最小费用问题,不规则三角网络)
* 参数1 目标文件名
* 参数2 Delaunay三角形结构体数组
* 参数3 Delaunay三角形数量
* 参数4 Delaunay三角网节点数组
* 参数5 Delaunay三角网边结构体数组
* 参数6 Delaunay三角网边数量
* 参数7 每个节点的费用
*/
int write_DIMACS(
const char* DIMACS_file_problem,
triangle* tri,
int num_triangle,
vector<tri_node>& nodes,
tri_edge* edges,
long num_edges,
Mat& cost
);
/** @brief 写入DIMACS文件(描述最小费用问题,Delaunay三角网络)
@param DIMACS_file_problem 目标DIMACS文件
@param triange Delaunay三角形结构体数组
@param nodes Delaunay三角网节点数组
@param edges Delaunay三角网边结构体数组
@param cost 每个节点的费用
@return 成功返回0,否则返回-1
*/
int write_DIMACS(
const char* DIMACS_file_problem,
vector<triangle>& triangle,
vector<tri_node>& nodes,
vector<tri_edge>& edges,
const Mat& cost
);
/*读取DIMACS文件(获取求解器求解结果)
参数1 最小费用流问题解文件
参数2 枝切路径1
参数3 枝切路径2
参数4 干涉相位图像行数
参数5 干涉相位图像列数
*/
int read_DIMACS(const char* DIMACS_file_solution, Mat& k1, Mat& k2, int rows, int cols);
/*读取DIMACS文件(获取求解器求解结果)
* 参数1 最小费用流问题解文件
* 参数2 Delaunay三角网边结构体数组
* 参数3 Delaunay三角网边数量
* 参数4 Delaunay三角网节点数组
* 参数5 Delaunay三角网三角形数组
* 参数6 Delaunay三角网三角形数量
*/
int read_DIMACS(
const char* DIMACS_file_solution,
tri_edge* edges,
int num_edges,
vector<tri_node>& nodes,
triangle* tri,
int num_triangle
);
/** @brief 读取DIMACS文件(获取求解器求解结果)
@param DIMACS_file_solution 最小费用流问题解文件
@param edges Delaunay三角网边结构体数组
@param nodes Delaunay三角网节点数组
@param triangle Delaunay三角网三角形数组
@param return 成功返回0,否则返回-1
*/
int read_DIMACS(
const char* DIMACS_file_solution,
vector<tri_edge>& edges,
vector<tri_node>& nodes,
vector<triangle>& triangle
);
/*将OpenCV Mat数据以二进制方式写入目标文件
* 参数1 目标文件名
* 参数2 待写入数据
*/
int cvmat2bin(const char* Dst_file, Mat& Src);
/*从二进制文件中读数据,并将数据转换成OpenCV Mat格式
* 参数1 二进制文件
* 参数2 目标矩阵
*/
int bin2cvmat(const char* Src_file, Mat& Dst);
/*InSAR多视处理(配准之后进行, 改变图像尺寸)
* 参数1 主图像(SLC)
* 参数2 辅图像(SLC)
* 参数3 多视相位
* 参数4 多视倍数(大于1)
*/
int multilook(ComplexMat& Master, ComplexMat& Slave, Mat& phase, int multilook_times);
/** @brief InSAR多视处理(不改变图像尺寸)
@param master_slc 主图像
@param slave_slc 辅图像
@param multilook_rg 距离向多视倍数
@param multilook_az 方位向多视倍数
@param multilooked_phase 多视相位
*/
int multilook(const ComplexMat& master, const ComplexMat& slave, int multilook_rg, int multilook_az, Mat& phase);
/** @brief 将相位转换成cos和sin(实部和虚部)
@param phase 输入相位
@param cos 实部
@param sin 虚部
@return 成功返回0,否则返回-1
*/
int phase2cos(const Mat& phase, Mat& cos, Mat& sin);
/*84坐标系转经纬高坐标系
* 参数1 84坐标系坐标
* 参数2 经纬高坐标系坐标(度/度/米)
*/
int xyz2ell(Mat xyz, Mat& llh);
/*经纬高坐标系转84坐标系
* 参数1 经纬高坐标系坐标(纬度/经度/高度)
* 参数2 84坐标系坐标
*/
int ell2xyz(Mat llh, Mat& xyz);
/*******************************************************/
/* 图像存储工具集 */
/*******************************************************/
/*量化保存SLC功率图
* 参数1 目标文件名
* 参数2 功率量化参数(可视范围dB)
* 参数3 单视复图像
*/
int saveSLC(const char* filename, double db, ComplexMat& SLC);
/*保存干涉相位图
* 参数1 目标文件名
* 参数2 颜色映射(jet/hsv/cool/parula等)
* 参数3 待保存相位
*/
int savephase(const char* filename, const char* colormap, Mat phase);
/*图像重采样
* 参数1 原图像
* 参数2 目标图像
* 参数3 目标图像高度
* 参数4 目标图像宽度
*/
int resampling(const char* Src_file, const char* Dst_file, int dst_height, int dst_width);
/*量化SAR图像与干涉相位叠加
* 参数1 量化SAR图像
* 参数2 干涉相位图
* 参数3 叠加图像
* 参数4 SAR图像占比
*/
int amplitude_phase_blend(
const char* amplitude_file,
const char* phase_file,
const char* blended_file,
double SAR_ratio = 0.9
);
/*******************************************************/
/* Delaunay三角网相关函数库 */
/*******************************************************/
/*从.edge文件读取Delaunay三角网的边信息
* 参数1 .edge文件
* 参数2 指向边结构体的指针(返回值,内存需要手动释放)
* 参数3 指向边个数的指针(返回值)
* 参数4 统计每个节点的邻接边数(返回值,内存需要手动释放)
* 参数5 节点数
*/
int read_edges(const char* filename, tri_edge** edges, long* num_edges, int** neighbours, long num_nodes);
/** @brief 从.edge文件读取Delaunay三角网的边信息
@param edge_file .edge文件
@param num_nodes 节点数
@param edges Delaunay三角网边数组(返回值)
@param node_neighbours 每个节点的邻接边数(返回值)
@return 成功返回0, 否则返回-1
*/
int read_edges(
const char* edge_file,
vector<tri_edge>& edges,
vector<int>& node_neighbours,
long num_nodes
);
/*初始化Delaunay三角网节点
* 参数1 节点数组(返回值)
* 参数2 相位(double型)
* 参数3 相位mask(int 型)
* 参数4 edges结构体数组
* 参数5 edges个数
* 参数6 每个节点的邻接边信息
* 参数7 节点数
*/
int init_tri_node(
vector<tri_node>& node_array,
Mat& phase,
Mat& mask,
tri_edge* edges,
long num_edges,
int* num_neighbour,
int num_nodes
);
/** @brief 初始化Delaunay三角网节点
@param node_array 节点数组(返回值)
@param phase 相位值
@param mask 相位掩膜
@param edges Delaunay三角网络边结构体数组
@param node_neighbours 每个节点的邻边个数
@param num_nodes 节点数
@return 成功返回0,否则返回-1
*/
int init_tri_node(
vector<tri_node>& node_array,
const Mat& phase,
const Mat& mask,
const vector<tri_edge>& edges,
const vector<int>& node_neighbours,
int num_nodes
);
/** @brief 初始化Delaunay三角网络边相位差
@param edges Delaunay三角网络边数组(已经使用read_edges函数初始化过的)
@param node_array Delaunay三角网络节点数组(已经使用init_tri_node函数初始化过的)
@return 成功返回0,否则返回-1
*/
int init_edge_phase_diff(
vector<tri_edge>& edges,
const vector<tri_node>& node_array
);
/*初始化Delaunay三角网边的相位质量
* 参数1 相位质量图
* 参数2 Delaunay三角网边结构体数组指针
* 参数3 Delaunay三角网边结构体数组大小
* 参数4 Delaunay三角网节点数组
*/
int init_edges_quality(Mat& quality, tri_edge* edges, int num_edges, vector<tri_node>& nodes);
/** @brief 初始化Delaunay三角网边的相位质量指数
@param quality_index 相位质量图指数(与相位质量相反)
@param edges Delaunay三角网边结构体数组
@param nodes Delaunay三角网节点数组
@return 成功返回0, 否则返回-1
*/
int init_edges_quality(
const Mat& quality_index,
vector<tri_edge>& edges,
const vector<tri_node>& nodes
);
/*从.ele文件和.neigh文件读取Delaunay三角网的三角形信息
* 参数1 .ele文件
* 参数2 .neigh文件
* 参数3 三角形结构体数组指针(返回值, 内存需要手动释放)
* 参数4 三角形个数(返回值)
* 参数5 Delaunay三角网节点数组
* 参数6 Delaunay三角网边数组
* 参数7 Delaunay三角网边数量
*/
int read_triangle(
const char* ele_file,
const char* neigh_file,
triangle** tri,
int* num_triangle,
vector<tri_node>& nodes,
tri_edge* edges,
int num_edgs
);
/** @brief 从.ele文件和.neigh文件读取Delaunay三角网的三角形信息
@param ele_file .ele文件
@param neigh_file .neigh文件
@param triangle 三角形结构体数组(返回值)
@param nodes Delaunay三角网节点数组
@param edges Delaunay三角网边数组
@return 成功返回0,否则返回-1
*/
int read_triangle(
const char* ele_file,
const char* neigh_file,
vector<triangle>& triangle,
vector<tri_node>& nodes,
vector<tri_edge>& edges
);
/*写.node文件
* 参数1 .node文件
* 参数2 节点数组
*/
int write_node_file(const char* filename, const Mat& mask);
/*********************************************************/
/* PS-InSAR 常用函数 */
/*********************************************************/
/*振幅离差指数法筛选PS点(D_A)
* 参数1 SAR幅度矩阵组
* 参数2 振幅离差阈值
* 参数3 mask(满足条件的PS点位置mask为1,其他为0)
*/
int PS_amp_dispersion(const vector<Mat>& amplitude, double thresh, Mat& mask);
/*fifth-order butterworth filter(五阶巴特沃斯滤波器)
* 参数1 grid_size
* 参数2 n_win
* 参数3 low_pass_wavelength
* 参数4 滤波器系数(返回值)
*/
int butter_lowpass(int grid_size, int n_win, double low_pass_wavelength, Mat& lowpass);
/*circle_shift
*/
int circshift(Mat& out, const cv::Point& delta);
/*fftshift2
*/
int fftshift2(Mat& out);
/*ifftshift
*/
int ifftshift(Mat& out);
/*二维傅里叶变换
* 参数1 输入矩阵
* 参数2 输出结果
*/
int fft2(Mat& Src, Mat& Dst);
/*复数二维傅里叶变换
* 参数1 输入矩阵
* 参数2 输出结果
*/
int fft2(ComplexMat& src, ComplexMat& dst);
/*逆二维傅里叶变换
* 参数1 输入矩阵
* 参数2 输出结果
*/
int ifft2(ComplexMat& src, ComplexMat& dst);
/*求标准差
* 参数1 输入矩阵
* 参数2 标准差返回值
*/
int std(const Mat& input, double* std);
/*SAR图像干涉相位序列去平地
* 参数1 干涉相位序列(原地操作)
* 参数2 干涉组合
* 参数3 卫星轨道参数(插值后, n_images×6)
* 参数4 地面控制点信息(纬度/经度/高度/行/列, n_gcps × 5)
* 参数5 SAR图像左上角在原SAR图像中的行数(可以直接设置为1)
* 参数6 SAR图像左上角在原SAR图像中的列数(可以直接设置为1)
* 参数7 收发方式(1单发单收, 2单发双收)
* 参数8 波长
*/
int PS_deflat(
vector<Mat>& interf_phase,
Mat& interf_combination,
vector<Mat>& pos,
vector<Mat>& gcps,
Mat& start_row,
Mat& start_col,
int mode,
double lambda
);
/*去平地(线性拟合法)
* 参数1 干涉相位(原地操作)
* 参数2 主星轨道参数(插值后, n_images×6)
* 参数3 辅星轨道参数(插值后, n_images×6)
* 参数4 地面控制点信息(纬度/经度/高度/行/列, n_gcps × 5)
* 参数5 SAR图像左上角在原SAR图像中的行数(可以直接设置为1)
* 参数6 SAR图像左上角在原SAR图像中的列数(可以直接设置为1)
* 参数7 收发方式(1单发单收, 2单发双收)
* 参数8 波长
*/
int _PS_deflat(
Mat& phase,
Mat& pos1,
Mat& pos2,
Mat& gcps,
int start_row,
int start_col,
int mode,
double lambda
);
/*
* 卫星轨道插值
* 参数1:卫星轨道参数(未插值)
* 参数2:插值时间间隔(s)
* 参数3:插值结果
*/
int stateVec_interp(Mat& stateVec, double time_interval, Mat& stateVec_interp);
/** @brief 坐标转换工具函数
@param coefficient 转换系数矩阵
@param coord_in_1 原坐标矩阵1(1和2的顺序很重要,经度/行坐标在前)
@param coord_in_2 原坐标矩阵2
@param coord_out 转换结果矩阵
*/
int coord_conversion(
Mat& coefficient,
Mat& coord_in_1,
Mat& coord_in_2,
Mat& coord_out
);
/** @brief 统计同质检验
@param pixel1 待检验像元1幅度序列(size: n_images×1)
@param pixel2 待检验像元2幅度序列(size: n_images×1)
@param homo_flag 是否为同质像元(返回0则为同质像元,-1则为非同质像元)
@param alpha 显著性水平(可以设定的值为 0.20,0.15,0.10,0.05,0.025,0.01,0.005,0.001。默认为0.05)
@param method 检验方法("KS":Kolmogorov-Smirnov检验,"AD":Anderson-Darling检验, 默认为KS检验)
@return 正常运行返回0,报错返回-1
*/
int homogeneous_test(
const Mat& pixel1,
const Mat& pixel2,
int* homo_flag,
double alpha = 0.05,
const char* method = "KS"
);
/** @brief 时序SAR图像复相关矩阵估计
@param slc_series slc数据堆栈
@param coherence_matrix 相关矩阵(复数, 返回值)
@param est_window_width 估计窗口宽度(奇数)
@param est_window_height 估计窗口高度(奇数)
@param ref_row (若进行统计同质检验)参考点行坐标,不进行同质检验则不需要此参数
@param ref_col (若进行统计同质检验)参考点列坐标,不进行同质检验则不需要此参数
@param b_homogeneous_test 是否进行统计同质检验(同质检验参考像素默认为中间点像素)
@param b_normalize 估计相关矩阵时slc序列是否归一化处理
@return 成功返回0,否则返回-1
*/
int coherence_matrix_estimation(
const vector<ComplexMat>& slc_series,
ComplexMat& coherence_matrix,
int est_window_width,
int est_window_height,
int ref_row,
int ref_col,
bool b_homogeneous_test = true,
bool b_normalize = true
);
/** @brief 区域生长法解缠(delaunay三角网)
@param nodes Delaunay三角网络节点数组
@param edges Delaunay三角网络边结构体数组
@param start_edge 积分起始边序号(从1开始)
@param distance_thresh 边长阈值,超过此阈值不通过此边积分
@param quality_thresh 质量阈值,低于此阈值不通过此边积分
@return 成功返回0,否则返回-1
*/
int unwrap_region_growing(
vector<tri_node>& nodes,
const vector<tri_edge>& edges,
size_t start_edge,
double distance_thresh,
double quality_thresh
);
private:
char error_head[256];
char parallel_error_head[256];
};
}
#endif
7、g++ `pkg-config --cflags opencv4` -c Registration.cpp com_htzs_insar_jni_Registration.cpp ComplexMat.cpp Utils.cpp -I /opt/module/jdk1.8.0_212/include/ -I /opt/module/jdk1.8.0_212/include/linux/ -fPIC -std=c++11(编译生成o文件)
8、g++ -shared com_htzs_insar_jni_Registration.o Utils.o ComplexMat.o Registration.o -o libRegistration.so `pkg-config --libs opencv4`(编译生成so文件)
注:当然也可以使用CMake来编译生成动态链接库
9、查看是否依赖了opencv的lib库(ldd -r libRegistration.so)
10:最后将Java程序生成jar在linux上运行
package com.htzs.insar.jni;
import com.htzs.insar.utils.ArrayUtil;
import java.io.*;
import java.io.FileOutputStream;
import java.nio.*;
/**
* 测试类
* @author ywb
* @createdDate 2022/1/4 14:48
* @updatedDate
*/
public class Main {
static {
// System.load("E:\\test\\inSAR_src\\x64\\Debug\\inSAR_src.dll");
// System.loadLibrary("InSAR_src7");
System.load("/usr/lib/libRegistration.so");
}
public static void main(String[] arg) throws FileNotFoundException {
Point[] p = new Point[19*19];
Point[] center_coord = new Point[19*19];
int width = 512;
int height = 512;
int master_original_width = 10000;
int slave_original_width = 10000;
int offset_row, offset_col;
int count = 0;
short[] master_real;
short[] master_imag;
short[] slave_real;
short[] slave_imag;
String master_real_file = "/home/htzs/data/master_real.dat";
String master_imag_file = "/home/htzs/data/master_imag.dat";
String slave_real_file = "/home/htzs/data/slave_real.dat";
String slave_imag_file = "/home/htzs/data/slave_imag.dat";
// String master_real_file = "E:\\outputDat\\master_real.dat";
// String master_imag_file = "E:\\outputDat\\master_imag.dat";
// String slave_real_file = "E:\\outputDat\\slave_real.dat";
// String slave_imag_file = "E:\\outputDat\\slave_imag.dat";
try {
for (int i = 0; i < 19; i++) {
for (int j = 0; j < 19; j++) {
offset_row = i * height + 1;
offset_col = j * width + 1;
master_real = getSLice(master_real_file, offset_row, offset_col, master_original_width, height, width);
master_imag = getSLice(master_imag_file, offset_row, offset_col, master_original_width, height, width);
slave_real = getSLice(slave_real_file, offset_row, offset_col, slave_original_width, height, width);
slave_imag = getSLice(slave_imag_file, offset_row, offset_col, slave_original_width, height, width);
p[count] = Registration.calcOffset(width, master_real, master_imag, slave_real, slave_imag);
center_coord[count] = new Point();
center_coord[count].setRow(offset_row - 1 + 0.5 * height);
center_coord[count].setCol(offset_col - 1 + 0.5 * width);
System.out.println("(" + i + "," + j + "):" + p[count].getRow() + " , " + p[count].getCol() + " , " + p[count].getCoherence());
// System.out.println(p[count].getRow());
// System.out.println(p[count].getCol());
// System.out.println("相关系数:" + p[count].getCoherence());
// writeDoubleArray("D:\\image\\cut\\master_real\\" + i +"_"+ j + "_master_real.dat", master_real);
// writeDoubleArray("D:\\image\\cut\\master_imag\\" + i +"_"+ j + "_master_imag.dat", master_imag);
// writeDoubleArray("D:\\image\\cut\\slave_real\\" + i +"_"+ j + "_slave_real.dat", slave_real);
// writeDoubleArray("D:\\image\\cut\\slave_imag\\" + i +"_"+ j + "_slave_imag.dat", slave_imag);
count++;
}
}
Fit fit = Registration.fitting(p, center_coord, 0.5);
System.out.println("Fit:" + fit.getA0() + "," + fit.getA1()+ "," + fit.getA2()+ ","+ fit.getA3()+ "," + fit.getA4()+ "," + fit.getA5()+ ",B:,"+ fit.getB0() + "," + fit.getB1()+ "," + fit.getB2()+ ","+ fit.getB3()+ "," + fit.getB4()+ "," + fit.getB5());
Point cen = new Point();
cen.setRow(1536);
cen.setCol(1536);
slave_real = getSLice(slave_real_file, 1, 1, slave_original_width, height * 3, width * 3);
slave_imag = getSLice(slave_imag_file, 1, 1, slave_original_width, height * 3, width * 3);
double[] buf = Registration.registration(width * 3, slave_real, slave_imag, cen, fit, 0);
System.out.println(buf.length);
} catch (InSAR_JNIException e) {
System.out.println(e.getMessage());
return;
}
}
/**
* 从图像文件中切片
*
* @param imageFile 图像文件
* @param offset_row 切片左上角在图像中的行数
* @param offset_col 切片左上角在图像中的列数
* @param original_width 原始图像宽度
* @param height 切片高度
* @param width 切片宽度
* @return :切片数组
**/
public static short[] getSLice(
String imageFile,
int offset_row,
int offset_col,
int original_width,
int height,
int width
) {
short[] slice = new short[height * width];
int offset = ((offset_row - 1) * original_width + offset_col - 1) * Short.BYTES;
byte[] byteBuf = new byte[width * Short.BYTES];
short[] temp;
int offset1 = 0;
File file = new File(imageFile);
try {
RandomAccessFile fr = new RandomAccessFile(file, "rw");
for (int i = 0; i < height; i++) {
fr.seek(offset);
fr.read(byteBuf, 0, width * Short.BYTES);
temp = ArrayUtil.convertToShorts(byteBuf);
System.arraycopy(temp, 0, slice, offset1, width);
offset = offset + original_width * Short.BYTES;
offset1 += width;
}
fr.close();
} catch (IOException e) {
e.printStackTrace();
}
return slice;
}
/**
* 将byte数组转换为double数组
*
* @param b 输入字节数组
* @return 返回double数组
**/
public static double[] getDouble(byte[] b) {
double[] ret = new double[b.length / 8];
for (int i = 0; i < b.length / 8; i++) {
long m;
m = b[8 * i];
m &= 0xff;
m |= ((long) b[1 + 8 * i] << 8);
m &= 0xffff;
m |= ((long) b[2 + 8 * i] << 16);
m &= 0xffffff;
m |= ((long) b[3 + 8 * i] << 24);
m &= 0xffffffffL;
m |= ((long) b[4 + 8 * i] << 32);
m &= 0xffffffffffL;
m |= ((long) b[5 + 8 * i] << 40);
m &= 0xffffffffffffL;
m |= ((long) b[6 + 8 * i] << 48);
m &= 0xffffffffffffffL;
m |= ((long) b[7 + 8 * i] << 56);
ret[i] = Double.longBitsToDouble(m);
}
return ret;
}
public static ByteBuffer asByteBuffer(ShortBuffer input) {
if (null == input) {
return null;
}
ByteBuffer buffer = ByteBuffer.allocate(input.capacity() * (Short.BYTES));
while (input.hasRemaining()) {
buffer.putDouble(input.get());
}
return buffer;
}
public static byte[] asByteArray(short[] input) {
if (null == input) {
return null;
}
return asByteBuffer(ShortBuffer.wrap(input)).array();
}
public static void writeDoubleArray(
String imageFile,
short[] indata
) throws FileNotFoundException {
try {
DataOutputStream out = new DataOutputStream(new FileOutputStream(imageFile, true));
byte[] bytearray = asByteArray(indata);
out.write(bytearray, 0, bytearray.length);
out.close();
} catch (IOException e) {
e.printStackTrace();
}
}
}
计算偏移量运行结果: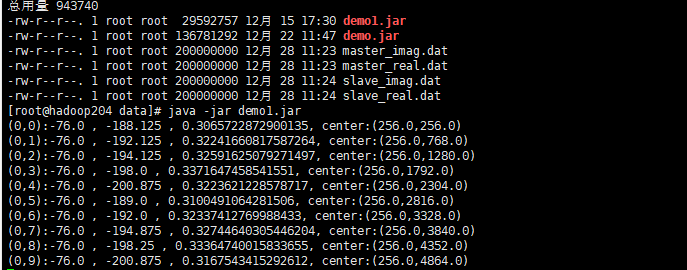

 浙公网安备 33010602011771号
浙公网安备 33010602011771号