

CBuilder中的第七个案例
myEXDC1 :逻辑控制框图
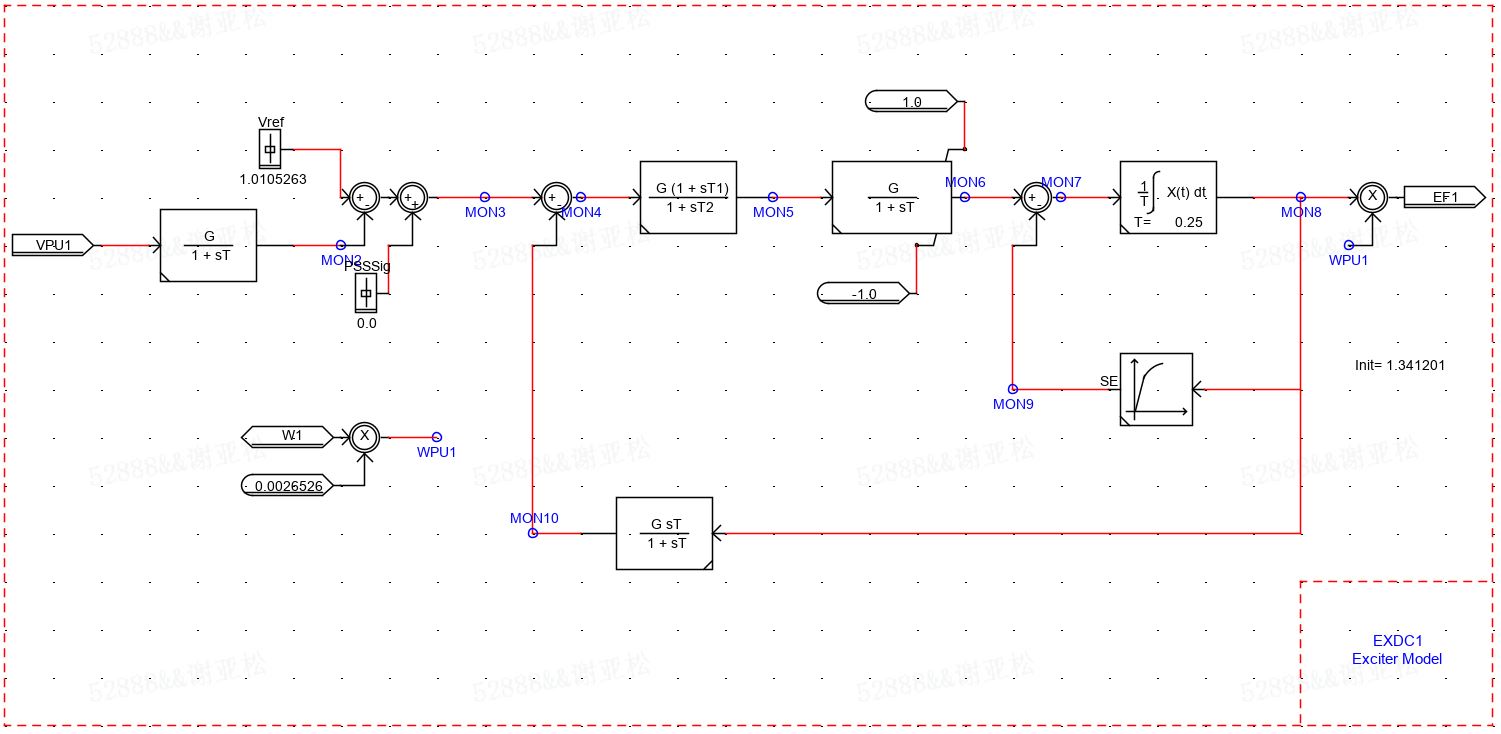
myEXDC1是包含** static、RAM_FUNCTIONS:、RAM****CODE**四部分代码的封装模式
VERSION:
3.001
include "myEXDC1.h"
STATIC:
double dt,washoutG,wBase;
double Vmax, Vref, tmp;
double efldi,Verr,v_init;
double mon1,mon2,mon3,mon4,mon5,mon6,mon7,mon8,mon9,mon10;
int mon_array[10] = {1,2,3,4,5,6,7,8,9,10};
include <builtin_gcc_generatorStructures.h>
struct realpolex realpole1;
struct realpolex realpole2;
struct integratorx integrator1;
struct washoutx washout1;
struct leadlagx leadlag1;
struct satKEx satKE1;
RAM_FUNCTIONS:
static void initIntegrator(double T,double Xic,double Yic,struct integratorx* intG)
{
double dt = getTimeStep();
intG->time_const = dt / (2.0 * T);
intG->x_old = Xic;
intG->y_old = Yic;
}
static void initWashout(double G, double T, double Xic, struct washoutx* wshout)
{
double K1;
double dt = getTimeStep();
if (T <= 0.0)
{
printf("\nError: Washout Time Constant must be greater than 0.0.");
reportError("initWashout ",2);
}
wshout->x_old = Xic * G;
wshout->y_old = 0.0;
K1 = 1.0/(1.0+dt/(2.0*T)); /* K1= 1/(1+dt/2T)*/
wshout->K1 = K1;
wshout->K2 = K1*(1.0-dt/(2.0*T)); /* K2= (1-dt/2T) / (1+dt/2T)*/
}
static void initRealPole(double G,double T,double Xic,double Yic,struct realpolex* rlpole)
{
double K;
double dt = getTimeStep();
rlpole->x_old = Xic * G;
rlpole->y_old = Yic;
// Approximate cases with small time-constants as pure gains.
if(T < dt)
rlpole->pureGain = 1;
else
rlpole->pureGain = 0;
K = (2.0 * T) / dt;
rlpole->K1 = 1.0/(1.0+K);
rlpole->K2 = (K-1.0)/(K+1.0);
}
static void initLeadLag(double Tb,double Tc,double Xic,double Yic,struct leadlagx* ldlag)
{
double x1,x2,x3,x4;
double dt = getTimeStep();
x1 = 1.0/(2.0*Tb/dt + 1.0);
x2 = 2.0*Tc/dt + 1.0;
x3 = 2.0*Tc/dt - 1.0;
x4 = 2.0*Tb/dt - 1.0;
ldlag->K1= x2*x1;
ldlag->K2= x3*x1;
ldlag->K3= x4*x1;
ldlag->x_old = Xic;
ldlag->y_old = Yic;
}
static double initSatKE (double E1,double SE1,double E2, double SE2,double Efd, double Ke, int Cal, struct satKEx* satKEx)
{
double A,B,X,Se;
/* Compute constants A and B from E1,Se1,E2,Se2 */
X= sqrt( (SE1*E1)/(SE2*E2) );
if (Cal == 1)
{
A= ((X*E2 - E1) / (X - 1.0));
}
else
{
A= fabs ((X*E2 - E1) / (X - 1.0));
}
B= (SE2*E2)/((E2-A)*(E2-A));
satKEx->A = A;
satKEx->B = B;
satKEx->Ke = Ke;
/* Compute Se Function: Se= Efd* [B*(Efd-A)**2/Efd] */
Efd= fabs(Efd);
Se= 0.0;
if (Cal == 1)
{
if (Efd > A && Efd != 0.0) Se= B*(Efd-A)*(Efd-A)/Efd;
}
else
{
if (Efd > fabs(A)) Se= B*(Efd-A)*(Efd-A)/Efd;
}
Se= Efd*Se + Efd*Ke;
return Se;
}
static double initSatKE0 (double E1,double SE1,double E2, double SE2,double Efd, double Vrmax, int Cal, struct satKEx* satKEx)
{
double A,B,X,Se,Sat0,Ke_,Ke;
double SXTMSX,FA,FB,FC;
/* Compute constants A and B from E1,Se1,E2,Se2 */
X= sqrt( (SE1*E1)/(SE2*E2) );
if (Cal == 1)
{
A= ((X*E2 - E1) / (X - 1.0));
}
else
{
A= fabs((X*E2 - E1) / (X - 1.0));
}
B= (SE2*E2)/((E2-A)*(E2-A));
satKEx->A = A;
satKEx->B = B;
if (SE1 == 0.0)
{
Sat0= 0.0;
}
else
{
SXTMSX = SE2 * E2;
FC = SXTMSX/(SE1*E1);
FA = FC - 1.0;
FB = 2.0 * ( FC*E1 - E2 );
FC = FC * E1*E1 - E2*E2;
FA = (FB-sqrt(FB*FB-4.0*FA*FC))/(2.0*FA);
if (Efd <= FA)
Sat0= 0.0;
else
Sat0 =(((Efd-FA)*(Efd-FA))*SXTMSX/(Efd*((E2-FA)*(E2-FA))));
}
Ke_ = Vrmax/(10.0*Efd) - Sat0;
satKEx->Ke = Ke_;
/* Compute Se Function: Se= Efd* [B*(Efd-A)**2/Efd] */
Efd= fabs(Efd);
Se= 0.0;
if (Cal == 1)
{
if (Efd > A && Efd != 0.0) Se= B*(Efd-A)*(Efd-A)/Efd;
}
else
{
if (Efd > fabs(A)) Se= B*(Efd-A)*(Efd-A)/Efd;
}
Se= Efd*Se + Efd*Ke_;
return Se;
}
static double computeInitVcomp (char *Gen)
{
double Rpu,Xpu,Pinit,Qinit,genMVA,Ppu,Qpu,Vi;
double Ireal,Iimag, Vreal, Vimag, Vre, Vim, Vcinit;
double type;
Vcinit = 1.0;
type = get_data_compType(Gen,"CompType");
if (type==1.0)
{
Vi = get_data(Gen,"Vpu");
Rpu = get_data(Gen,"VcompRpu");
Xpu = get_data(Gen,"VcompXpu");
Pinit = get_data(Gen,"P0");
Qinit = get_data(Gen,"Q0");
genMVA = get_data(Gen,"MVA");
Ppu = Pinit/genMVA;
Qpu = Qinit/genMVA;
Ireal = Ppu/Vi;
Iimag = -Qpu/Vi;
Vreal = Vi + (Rpu*Ireal) - (Xpu*Iimag);
Vimag = Rpu*Iimag + Xpu*Ireal;
Vre = Vreal*Vreal;
Vim = Vimag*Vimag;
Vcinit = sqrt(Vre + Vim);
}
else if(type==2.0)
{
Vcinit = get_data(Gen,"rBusVoltage");
}
else
{
Vcinit = 1.0;
}
return Vcinit;
}
RAM:
dt= getTimeStep();
wBase = 2.0*PI*HTZ;
// Calculation of vrmax value.
if(Vrmax <= 0.0)
{
if(E2< E1)
{
printf("\nWarning: Vrmax is less than zero.");
printf("\n E2 must be greater than E1");
printf("\n Subsystem %d, Machine %s, exciter type ESDC1A.\n", getSubsystem(),Gen);
reportError("EXDC1",1);
}
Vrmax = (Se2 + Ke)E2;
Vrmin = -1Vrmax;
}
if (Vrmax < Vrmin)
{
tmp = Vrmin;
Vrmin = Vrmax;
Vrmax = tmp;
printf("\nWarning: Vrmax is less than Vrmin.");
printf("\n Vrmin set to Vrmax and Vrmax set to Vrmin");
printf("\n Subsystem %d, Machine %s, exciter type EXDC1.\n", getSubsystem(),Gen);
reportError("EXDC1",1);
}
/* read initial field voltage */
efldi = get_data(Gen,"Efldi");
/* Compute initial Vref value /
if (Vi < 0.0 || LFInit==1)
{
Vi= get_data(Gen,"Vpu");
if (LDComp == 1)
{
Vi = computeInitVcomp(Gen);
}
}
/ Compute initial Se + KE */
if (Ke <= 0.0)
{
v_init = initSatKE0(E1,Se1,E2,Se2,efldi,Vrmax,Cal,&satKE1);
}
else
{
v_init = initSatKE(E1,Se1,E2,Se2,efldi,Ke,Cal,&satKE1);
}
Verr = v_init/Ka;
Vref = Verr + Vi;
Vmax= 1.2;
if (Vref > Vmax) Vmax= 1.2*Vref;
/* the create_slider function is in the .h file in the INPUTS section */
/* Initialize variables for real pole #1 */
initRealPole(1.0,Tr,Vi,Vi,&realpole1);
/* Initialize variables for lead - lag */
initLeadLag(Tb,Tc,Verr,Verr,&leadlag1);
/* Initialize variables for real pole #2 */
initRealPole(Ka,Ta,Verr,v_init,&realpole2);
/* Initialize variables for wash out */
washoutG = Kf/Tf1;
initWashout(washoutG,Tf1,efldi,&washout1);
/* Initialize variables for integrator */
initIntegrator(Te,0.0,efldi,&integrator1);
/* Check initial output values are within Vrmax and Vrmin limits */
if (v_init > Vrmax || v_init < Vrmin)
{
printf("\nWarning: Initial value of mon6 is not within the entered limits.");
printf("\n VRmax = %f, VRmin = %f, mon6 initial value = %f.",Vrmax,Vrmin,v_init);
printf("\n Subsystem %d, Machine %s, exciter type EXDC1x.\n", getSubsystem(),Gen);
reportError("EXDC1x",1);
}
/* Initialize all monitoring variables that are going to be referenced in the code section before they are assigned a value */
mon9 = v_init;
mon10 = 0.0;
CODE_FUNCTIONS:
include <builtin_gcc.h>
CODE:
double puSpeed;
/* Include load compensation */
if (LDComp==1)
{
mon1 = VC;
}
else
{
mon1 = VPU;
}
/* realpole #1*/
mon2 = realPole(mon1, 1.0, 0, 0.0, 0.0,0,0,0.0, &realpole1);
/* Summing junction */
mon3 = Vref1 - mon2;
/* Optionally include stabilizer input */
if (PSS == 1)
{
mon3 = mon3 + VS;
}
mon4 = mon3 - mon10;
/* lead-lag */
mon5 = leadLag(mon4,1.0,0,0.0,0.0,0,0,0.0,&leadlag1);
/* realpole #2 */
mon6 = realPole(mon5,Ka,1,Vrmin,Vrmax,0,0,0.0,&realpole2);
/* Summing Junction */
mon7 = mon6 - mon9;
/* Integrator */
mon8 = integrator(mon7,0,0.0,0.0,0,0,0.0,&integrator1);
/* Saturation Function */
mon9 = satKE(mon8, &satKE1);
/* Washout */
mon10 = washOut(mon8,washoutG,0,0.0,0.0,0,0,0.0,&washout1);
/* Efd */
OUT = mon8;
if (spdMult == 1)
{
puSpeed = Speed/wBase;
OUT = mon8 * puSpeed;
}
/* check if monitoring is enabled, if so assign the output based on the dial position */
if (Mon ==1)
{
if (dial1 == 2)
{
internalV = mon2;
}
else if (dial1 == 3)
{
internalV = mon3;
}
else if (dial1 == 4)
{
internalV = mon4;
}
else if (dial1 == 5)
{
internalV = mon5;
}
else if (dial1 == 6)
{
internalV = mon6;
}
else if (dial1 == 7)
{
internalV = mon7;
}
else if (dial1 == 8)
{
internalV = mon8;
}
else if (dial1==9)
{
internalV = mon9;
}
else if (dial1==10)
{
internalV = mon10;
}
else
{
internalV = mon1;
}
}
