MIT 18.06 linear algebra lecture 15 子空间投影 笔记
投影
如果有一向量\(\boldsymbol{b}\)和向量\(\boldsymbol{a}\)所在的直线,该直线上哪一点离\(\boldsymbol{b}\)最近?
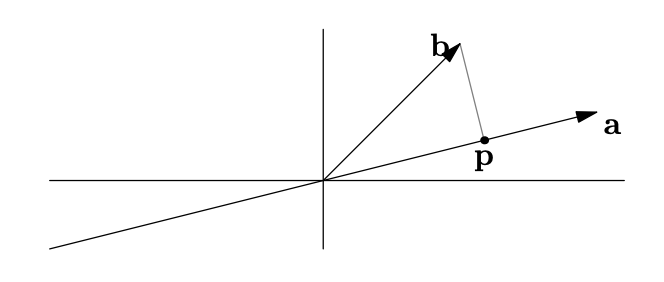
由上图可以看到,经过\(\boldsymbol{b}\)且与\(a\)所正交的直线和\(\boldsymbol{a}\)所在直线的交点\(\boldsymbol{p}\)即是满足上述条件的点。如果将\(\boldsymbol{p}\)看作对\(\boldsymbol{b}\)的近似,则\(\boldsymbol{e}=\boldsymbol{b}-\boldsymbol{p}\)的长度则是描述近似程度的误差。
通过三角函数或者代数方法能够找到\(\boldsymbol{p}\),但使用线性代数的方法更为简便。因为\(\boldsymbol{p}\)在\(\boldsymbol{a}\)所在的直线上,所以\(\boldsymbol{p}=x\boldsymbol{a}\),其中\(x\)是任意实数;另外,\(\boldsymbol{a}\)和\(\boldsymbol{e}=\boldsymbol{b}-x\boldsymbol{a}\)垂直,所以有:
而\(\boldsymbol{p}=\boldsymbol{a}\frac{\boldsymbol{a}^T\boldsymbol{b}}{\boldsymbol{a}^T\boldsymbol{a}}\)
。需要注意的是,当\(\boldsymbol{b}\)放缩时,投影大小也对应放缩;但当\(\boldsymbol{a}\)放缩时,并不影响投影大小。
投影矩阵
将投影操作转化为矩阵:\(\boldsymbol{p}=P\boldsymbol{b}\):
则投影矩阵\(P\)为:
注意到,\(\boldsymbol{a}\boldsymbol{a}^T\)是一个矩阵,而不是实数,并且矩阵乘法不满足交换律。
\(P\)的列空间由\(\boldsymbol{a}\)生成,因为对于任意\(\boldsymbol{b}\),\(P\boldsymbol{b}\)均在由\(\boldsymbol{a}\)确定的直线上,矩阵\(P\)的秩为\(1\);\(P\)是对称的;\(P^2\boldsymbol{b}=P\boldsymbol{b}\),因为对投影后的向量再进行投影,最终还是在\(a\)所在直线的同一点上。所以通常投影矩阵具有下述性质:
投影有什么用?
在上一节提到,\(A\boldsymbol{x}=\boldsymbol{b}\)可能没有解,向量\(A\boldsymbol{x}\)在\(A\)的列空间中,但是\(\boldsymbol{b}\)不一定在列空间中,所以将\(\boldsymbol{b}\)投影到\(A\)的列空间中的\(\boldsymbol{p}\),然后解\(A\hat{\boldsymbol{x}}=\boldsymbol{p}\)
高维空间中的投影
在\(\mathbb{R}^3\)中,如何将向量\(\boldsymbol{b}\)投影到在平面中离\(\boldsymbol{b}\)最近的向量\(\boldsymbol{p}\)上呢?
假设\(\boldsymbol{a_1}\)和\(\boldsymbol{a_2}\)构成平面的基,该平面也是矩阵\(A=\begin{bmatrix}\boldsymbol{a_1}&\boldsymbol{a_2}\end{bmatrix}\)的列空间。
因为\(\boldsymbol{p}\)是平面内的向量,所以\(\boldsymbol{p}=\hat{x}_1\boldsymbol{a}_1+\hat{x_2}\boldsymbol{a}_2=A\hat{\boldsymbol{x}}\),接下来是找到\(\boldsymbol{\hat{x}}\)。\(\boldsymbol{p}\)和\(\boldsymbol{b}\)的误差\(\boldsymbol{e}=\boldsymbol{b}-\boldsymbol{p}=\boldsymbol{b}-A\hat{\boldsymbol{x}}\)与投影的平面正交,所以\(\boldsymbol{e}\)和\(\boldsymbol{a}_1\)、\(\boldsymbol{a}_2\)垂直:
上式转换为矩阵形式有,\(A^T(\boldsymbol{b}-A\boldsymbol{\hat{x}})=\boldsymbol{0}\),当投影到一条线上时,\(A\)仅有一列,所以等式为:\(a^T(\boldsymbol{b}-\boldsymbol{\hat{x}}a)=0\)
注意到,\(\boldsymbol{e}=\boldsymbol{b}-A\boldsymbol{\hat{x}}\)在\(A^T\)的零空间中,在\(A\)的左零空间中。此前已经了解到,\(A\)的左零空间与\(A\)的列空间是正交的,所以侧面证明上面的计算是正确的。
重写等式\(A^T(\boldsymbol{b}-A\boldsymbol{\hat{x}})=\boldsymbol{0}\),得到:
当投影到一条直线时,\(A^TA\)是个实数;现在则是一个方阵,所以用乘逆矩阵\((A^TA)^{-1}\)的方式代替除以\(\boldsymbol{a}^T\boldsymbol{a}\)。
在\(n\)维情况下:
上面的运算结果貌似可以化简,但是当\(A\)不是方阵的时候,\((A^TA)^{-1}=A^{-1}(A^T)^{-1}\)并不成立,该等式仅在\(A\)是一个方阵且可逆的情况,列空间包括整个空间并且\(\boldsymbol{b}\)也在其中。容易证明,在高维空间中,仍然有:
最小二乘
假设当前有一组数据点的集合\((t,b)\):
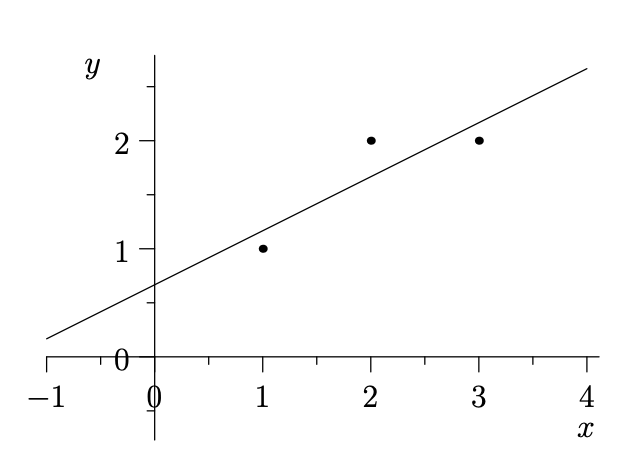
接下来找到想找一条最近的直线\(b=C+Dt\)去拟合数据集,如果有直线经过所有的点,有:
上述等式等同于:
但是在例子中,并找不到一条直线能通过三个点,方程组是无解的,在下一节将通过解\(A^TA\hat{\boldsymbol{x}}=A^T\boldsymbol{b}\)得到一个最佳近似解。
笔记来源:MIT 18.06 lecture 15

 浙公网安备 33010602011771号
浙公网安备 33010602011771号