视觉SLAM十四讲 学习笔记7——ch7视觉里程计
3D-2D:PnP问题
描述了当知道n个3D空间点及其投影位置时,如何估计相机的位姿。
PnP 问题有很多种求解方法,例如:用 3 对点估计位姿的P3P、直接线性变换DLT、EPnP(Efficient PnP) 、UPnP等等。此外,还能用非线性优化的方式,构建最小二乘问题并迭代求解,也就是万金油式的 Bundle Adjustment。
直接线性变换(DLT):(忽略掉了R和t的内在约束)
根据相机的投影原理,有如下公式:
其中,P为空间点的其次坐标,P = (X, Y, Z, 1)T 。x为投影平面上的齐次坐标 x = (u 1 , v 1 , 1)T
展开后如下:
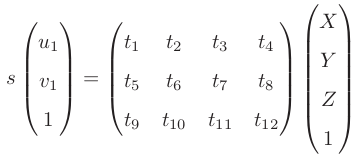
可以得到3个方程,用最后一个方程带入前两个,消除s变量,则一个特征点提供了两个方程,如下:
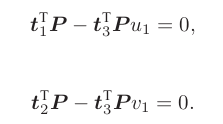
其中t为未知量(共12个),则需12个方程,也就是6个特征点,才可以求解(超定时求最小二乘解)
这种做法(DLT),将R,t看成独立的未知量(忽略了内在的约束),所以在求出结果之后,需要将t组成的矩阵投影回SO(3)(通常用QR分解来实现)。
P3P:利用3对点求相机外参
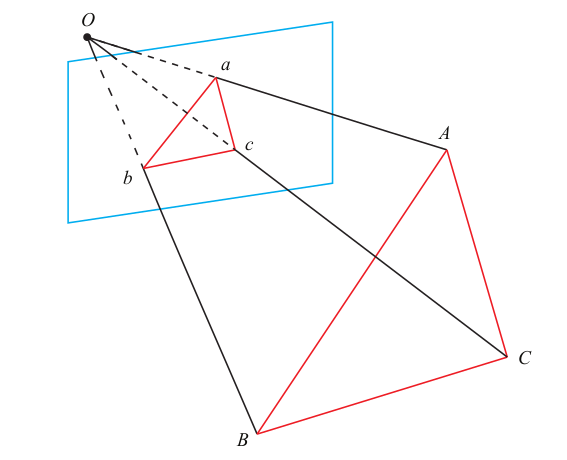
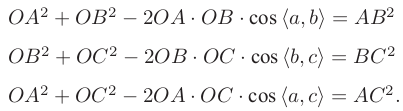
根据余弦定理:
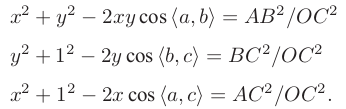
对以上三式全体除以 OC2 , 并且记 x = OA/OC, y = OB/OC,得:
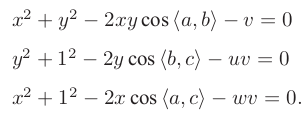
记 v = AB2/OC2 ,uv = BC2 /OC2 ,wv = AC2 /OC2,有:
消v,得:

余弦值已知,u、w已知,所以是二元二次方程,可解(吴氏消元法)
最后,得到x、y后,带入下式:

解得v,从而得到OC的长度,进而得到各点的距离。
所以,我们得到了3D-3D的点对,进而可以计算ICP,见下文。
PnP的优化解法:Bundle Adjustment
前面说的线性方法,往往是先求相机位姿,再求空间点位置,而非线性优化则是把它们都看成优化变量,放在一起优化。这是一种非常通用的求解方式,我们可以用它对 PnP 或 ICP 给出的结果进行优化。在 PnP 中,这个 Bundle Adjustment 问题,是一个最小化重投影误差(Reprojection error)的问题。
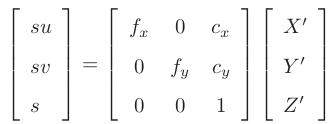
考虑 n 个三维空间点 P 及其投影 p,我们希望计算相机的位姿 R,、t,它的李代数表示为 ξ。假设某空间点坐标为 Pi = [ X i, Y i, Zi ]T ,其投影的像素坐标为 u i = [ ui,vi]T,则有:
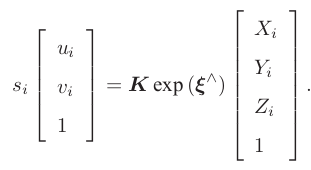
即:![]()
中间隐含着的齐次坐标到非齐次的转换,否则按矩阵的乘法来说,维度是不对的。
由于相机位姿未知及观测点的噪声,该等式存在一个误差。因此,我们把误差求和,构建最小二乘问题,然后寻找最好的相机位姿,使它最小化:

该问题的误差项,是将像素坐标(观测到的投影位置)与 3D 点按照当前估计的位姿进行投影得到的位置相比较得到的误差,所以称为重投影误差。
在考虑优化问题时,之前提到的求导的问题就派上用场了,对于一个比较抽象的优化问题,通过求导可以判断优化的方向。
对于相机位姿的优化:误差对位姿的李代数求导
当 e 为像素坐标误差(2 维),x 为相机位姿(6 维)时,J 将是一个 2 × 6 的矩阵。
使用扰动模型求求取李代数的导数,记变换到相机坐标系下的空间点坐标为 P ′ ,并且将其前 3 维取出来:
![]()
相机投影模型相对于 P ′ 为:
![]()
展开:
消去 s(实际上就是 P ′ 的距离),得:

利用链式法则对扰动模型求导:

第一个因子是误差关于投影点的导数,易知:

第二个因子为变换后的点关于李代数的导数,由于公式:
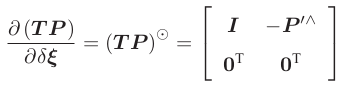
其中T为对P点进行的变换,变换后的点即为P'。
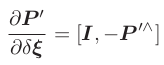
在 P' 中只取前3维,可以得到:
两个因子相乘,得到了一个2X6的雅克比矩阵:

对于特征点的空间位置的优化:误差对空间点P求导

第一个因子前面已经得到了计算结果。
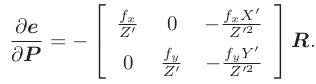
由于:
可以知道,P'对P求导,只剩下R矩阵,于是有:
总结:
我们推导出了观测相机方程关于相机位姿与特征点的两个导数矩阵。它们十分重要,能够在优化过程中提供重要的梯度方向,指导优化的迭代。

