视觉SLAM十四讲 学习笔记4——ch5相机与图像
单目相机模型:
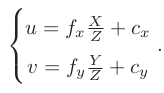
针孔相机模型的映射关系:
化为矩阵形式:
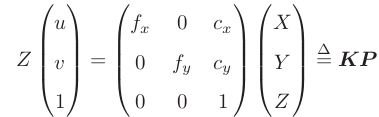
其中,中间的矩阵被称为相机的内参矩阵K。通常认为,相机的内参在出厂之后是固定的,不会在使用过程中发生变化。有点相机生产厂商会告诉你相机的内参,而有时需要你自己确定相机的内参,也就是所谓的标定。(目前标定算法已经比较成熟,如著名的单目棋盘格张友正标定法)
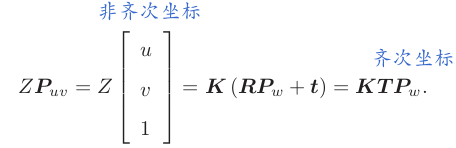
(后一个式子隐含了一次齐次坐标到非齐次坐标的转换:T为4X4的矩阵 Pw为3X1的向量)
其中,相机的位姿 R, t 又称为相机的外参数(Camera Extrinsics)。相比于不变的内参,外参会随着相机运动发生改变,同时也是 SLAM 中待估计的目标,代表着机器人的轨迹。
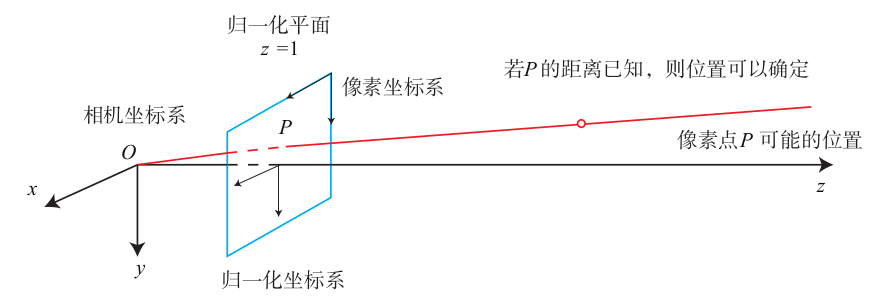
投影过程还可以从另一个角度来看。我们可以把一个世界坐标点先转换到相机坐标系,再除掉它最后一维的数值(即该点距离相机成像平面的深度),这相当于把最后一维进行归一化处理,得到点 P 在相机归一化平面上的投影。

归一化坐标可看成相机前方 Á z = 1 处的平面上的一个点,这个 z = 1 平面也称为归一化平面。
归一化坐标再左乘内参就得到了像素坐标,所以我们可以把像素坐标 [u, v]T 看成对归一化平面上的点进行量化测量的结果。从这个模型中也可以看出,如果对相机坐标同时乘以任意非零常数,归一化坐标都是一样的,这说明点的深度在投影过程中被丢失了,所以单目视觉中没法得到像素点的深度值。
畸变:
由透镜形状引起的畸变称为径向畸变;由于不能使透镜和成像平面严格平行会还会引起切向畸变。
径向畸变可看成坐标点沿着长度方向发生了变化,也就是其距离原点的长度发生了变化。切向畸变可以看成坐标点沿着切线方向发生了变化,也就是水平夹角发生了变化。
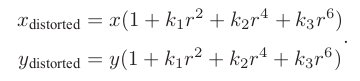
径向畸变多项式描述:
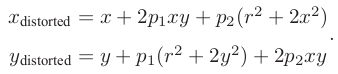
切向畸变多项式描述:
单目相机成像过程总结:
1、首先,世界坐标系下由一个固定的点P,世界坐标为Pw。
2、由于相机在运动,他的运动有R,t或变换矩阵T∈SE(3)描述。P的相机坐标为:
![]()
3、这时的P点的相机坐标分量为X、Y、Z,把他们投影带归一化平面Z = 1上,得到P的归一化坐标:

4、有畸变时,根据畸变参数计算Pc发生畸变后的坐标。
5、最后,P的归一化坐标经过内参后,对应到它的像素坐标Puv = KPc
双目相机模型:
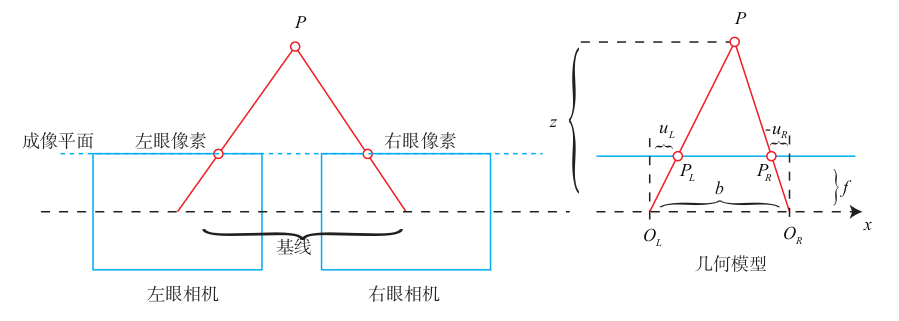
可列出下式:
![]()
可推导出:
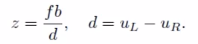
其中d为视差,描述同一个点在左右目上成像的距离,d最小为一个像素(制约双目测量z 的量程)。

