
旋转-四元数
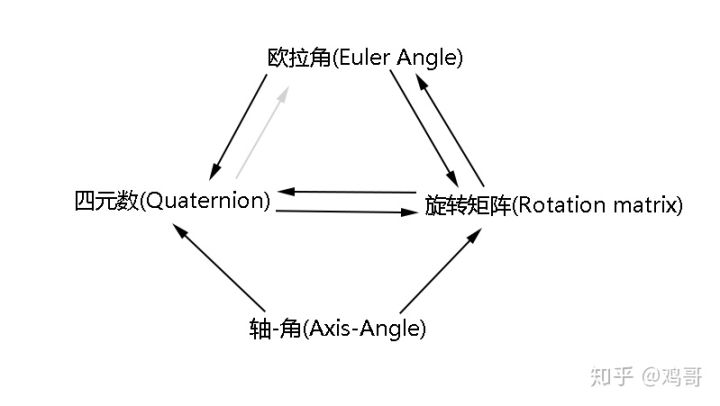
旋转变换方式的介绍
一个旋转变换最通俗易懂的方式就是轴角变换,也就是绕着某一个轴旋转多少角度
但是在人机交互界面常用的是欧拉角;
计算机内部计算常用的是旋转矩阵:
内部的存储常用的是四元数;
轴角变换:
绕着某一个过原点的轴,旋转某一个角度。
轴可以用一个单位长度的点[w1,w2,w3]来表示,旋转角度为θ
一个旋转变换可以用旋转矩阵、欧拉角、思源组表示
旋转矩阵
旋转矩阵可以看做一种特殊的坐标轴转换,而坐标转换可以用3*3的旋转矩阵表示
欧拉角
任何一个旋转可以表示为依次绕着三个旋转轴旋转三个角度的组合,这三个角度就是欧拉角
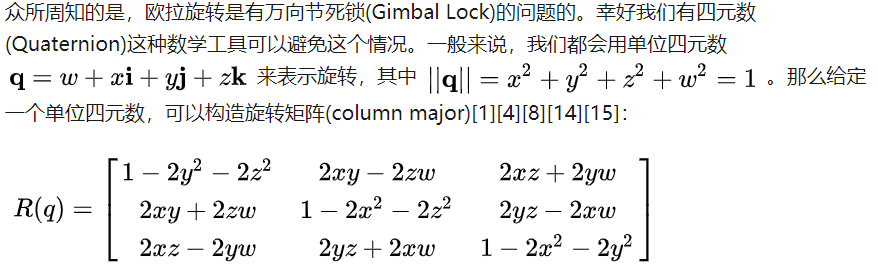
四元数
以上方式各有缺陷,主要是复杂度上的缺陷。因此四元数用的多一些。
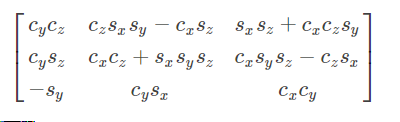
欧拉角——>旋转矩阵

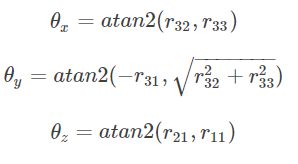
旋转矩阵----->欧拉角
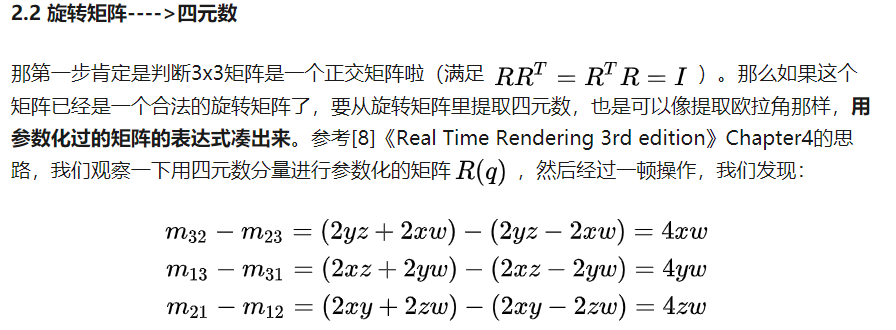
四元数---》旋转矩阵

 浙公网安备 33010602011771号
浙公网安备 33010602011771号