
相机畸变以及相机标定
相机畸变的种类
径向畸变
产生原因
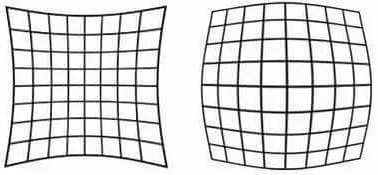
由透镜形状引起的畸变称为径向畸变,径向畸变主要分为桶形畸变和枕型畸变。
在针孔模型中,一条直线投影到像素平面上还是一条直线。
但在实际中,相机的透镜往往使得真实环境中的一条直线在图片中变成了曲线。
越靠近图像的边缘现象越明显。 由于透镜往往是中心对称的,这使得不规则畸变通常径向对称。
现象

切向畸变
产生原因
除了透镜的形状会引入径向畸变,在相机的组装过程中由于不能使透镜严格和成像平面平行,
会引入切向畸变。
图示

畸变模型
径向畸变
径向畸变,他们都是随着与中心距离的增加而变大。
所以用一个像素和中心距离的泰勒展开式来表示

distorted:这个表示真实观测到的坐标,包含畸变
xy:校正后的坐标
我们认为理想的坐标和真实观测的坐标的关系是泰勒展开式的关系
对于畸变很小的中心区域, 主要起作用的是k1
对于畸变较大的边缘区域,主要起作用的是k2
对于畸变很大的鱼眼相机,可以加入k3来表示
切向畸变

整体的畸变

相机畸变参数5个

![]()
一般k1,k2都足够了,所以k3放在了最后面
相机标定的方法


 浙公网安备 33010602011771号
浙公网安备 33010602011771号