ROS基本程序实现
0.前言
现在介绍ROS基本程序实现的教程有很多,步骤无非就是建工作空间,编译,创建功能包,创建文件和修改CMakeList,之后再编译、运行程序这几步。但是这些教程中很多在文件夹切换的很混乱,导致会出现一堆奇奇怪怪的错误,其实只要注意你操作的文件夹位置,很多问题都不是问题。这也是博主为什么写这篇文章的原因。
1.实现步骤
(1)创建工作空间并初始化
lxb@lxb-virtual-machine:~/study_ros$ mkdir -p my_workspace/src
lxb@lxb-virtual-machine:~/study_ros$ cd my_workspace/
lxb@lxb-virtual-machine:~/study_ros/my_workspace$ catkin_make
注意:
我的工作空间文件夹位置为:~/study_ros/my_workspace/
(2)进入 src 创建功能包并添加依赖
lxb@lxb-virtual-machine:~/study_ros/my_workspace$ cd src
lxb@lxb-virtual-machine:~/study_ros/my_workspace/src$ catkin_create_pkg my_function_package roscpp rospy std_msgs
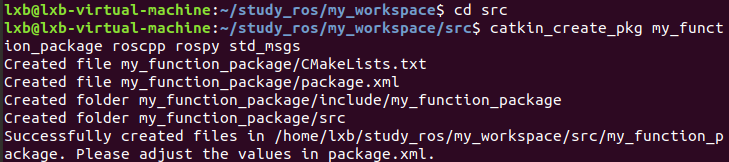
注意:
我的功能包文件夹位置为:~/study_ros/my_workspace/src/my_function_package
以后的操作大多数都是在功能包中进行的,除了catkin_make编译
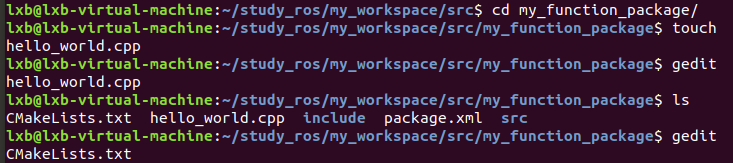
(3)进入功能包的 src 目录创建编辑核心代码hello_world.cpp
lxb@lxb-virtual-machine:~/study_ros/my_workspace/src$ cd my_function_package/
lxb@lxb-virtual-machine:~/study_ros/my_workspace/src/my_function_package$ touch hello_world.cpp
lxb@lxb-virtual-machine:~/study_ros/my_workspace/src/my_function_package$ gedit hello_world.cpp
注意:
hello_world.cpp的内容为:
#include "ros/ros.h"
int main(int argc, char *argv[])
{
//执行 ros 节点初始化
ros::init(argc,argv,"hello");
//创建 ros 节点句柄
ros::NodeHandle n;
//控制台输出 hello world
ROS_INFO("hello world!");
return 0;
}
(4)编辑功能包下的 Cmakelist.txt文件
lxb@lxb-virtual-machine:~/study_ros/my_workspace/src/my_function_package$ gedit CMakeLists.txt

编辑方式:
找到Cmakelist.txt文件下面对应的部分,去掉前面#注释,并将内容改为如下所示,其中hello_world_newname为hello_world.cpp的映射名,随便写,但是建议写成和hello_world.cpp同名,也就是hello_world
add_executable(hello_world_newname src/hello_world.cpp)
target_link_libraries(hello_world_newname
${catkin_LIBRARIES}
)
(5)进入工作空间目录并编译

编译成功截图
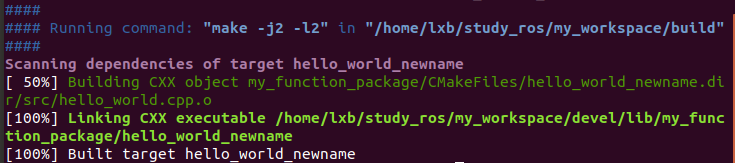
注意:
若编译失败,再重新走一遍流程,一般都是流程出错
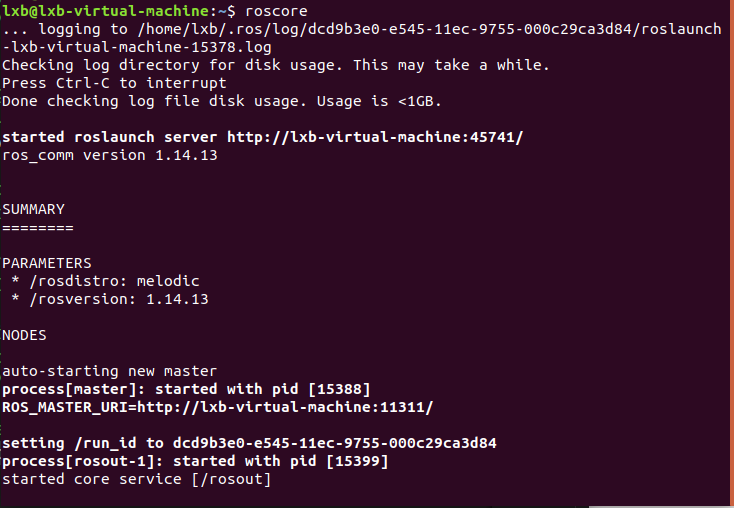
(6)刷新环境并执行程序
1.先打开一个新终端,运行roscore
lxb@lxb-virtual-machine:~$ roscore
2.在原来的终端下刷新环境并执行程序
lxb@lxb-virtual-machine:~/study_ros/my_workspace$ source ./devel/setup.bash
lxb@lxb-virtual-machine:~/study_ros/my_workspace$ rosrun my_function_package hello_world_newname

2.后言
这个在我稀稀拉拉学ros多年,终于把它给搞懂了,这里对于新学习ROS的同学,可以看下这个教程http://www.autolabor.com.cn/book/ROSTutorials/ ,这个教程给了我很多的启发。如果有什么问题,也欢迎大家评论去交流,最后祝大家可以ROS顺利!


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY