构建机器人仿真平台
一、URDF模型改写为xacro文件
将之前的机器人URDF模型,改写成xacro文件,创建仿真环境,将机器人模型加载到Gazebo仿真环境中,完成运动控制的仿真。
在./mbot_description/urdf文件夹中创建mbot_base_gazebo_automobile.xacro文件,代码如下:
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_mass" value="20" />
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.40"/>
<xacro:property name="base_width" value="0.20"/>
<xacro:property name="base_height" value="0.16"/>
<xacro:property name="wheel_mass" value="2" />
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_x" value="0.1"/>
<xacro:property name="wheel_joint_y" value="0.1"/>
<xacro:property name="wheel_joint_z" value="0.08"/>
<xacro:property name="caster_radius" value="0.015"/> <!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="update_rate" value="100.0"/> <!-- controller-->
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<!-- Macro for inertia matrix -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<!-- Macro for robot wheel -->
<xacro:macro name="wheel" params="prefix reflect orientation">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="${orientation*wheel_joint_x} ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<gazebo reference="${prefix}_wheel_link">
<material>Gazebo/Gray</material>
</gazebo>
<!-- Transmission is important to link the joints and the controller -->
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_wheel_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<xacro:macro name="mbot_base_gazebo">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<gazebo reference="base_footprint">
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<box size="${base_length} ${base_width} ${base_height}"/>
</geometry>
<material name="yellow" />
</visual>
<collision>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<box size="${base_length} ${base_width} ${base_height}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
</gazebo>
<wheel prefix="back_left" reflect="-1" orientation="-1"/>
<wheel prefix="back_right" reflect="1" orientation="-1"/>
<wheel prefix="front_left" reflect="-1" orientation="1"/>
<wheel prefix="front_right" reflect="1" orientation="1" />
<!-- controller -->
<gazebo>
<plugin name="skid_steer_drive_controller"
filename="libgazebo_ros_skid_steer_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>${update_rate}</updateRate>
<legacyMode>true</legacyMode>
<leftFrontJoint>front_left_wheel_joint</leftFrontJoint>
<rightFrontJoint>front_right_wheel_joint</rightFrontJoint>
<leftRearJoint>back_left_wheel_joint</leftRearJoint>
<rightRearJoint>back_right_wheel_joint</rightRearJoint>
<covariance_x>0.000100</covariance_x>
<covariance_y>0.000100</covariance_y>
<covariance_yaw>0.010000</covariance_yaw>
<wheelSeparation>${wheel_joint_y*2}</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>true</broadcastTF> <!--need turn on-->
<torque>30</torque> <!--'wheelTorque' is renamed 'torque'-->
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic> <!--topicName-->
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_footprint</robotBaseFrame>
</plugin>
</gazebo>
</xacro:macro>
</robot>
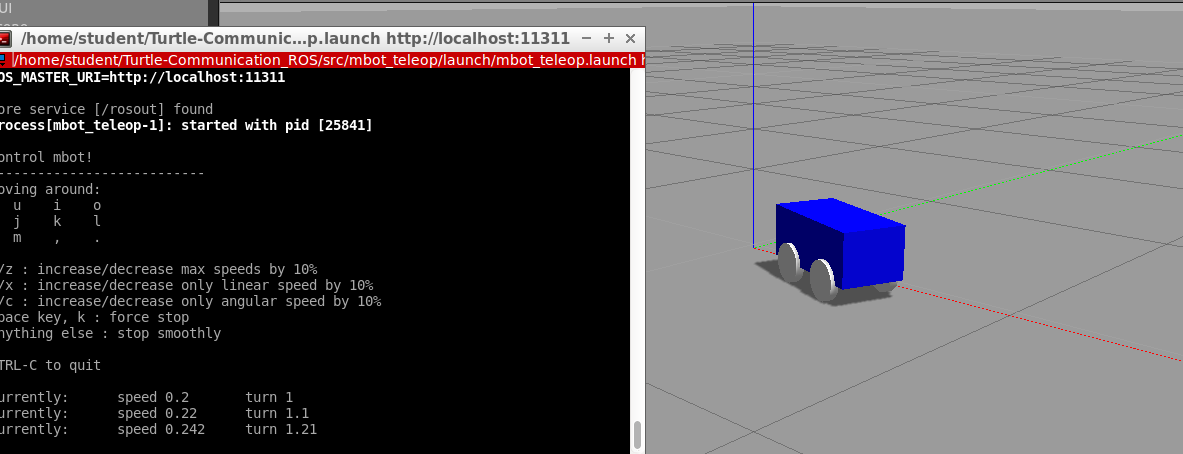
运动控制的仿真效果如下:
二、小车模型上添加摄像头和激光雷达
2.1 模型加载到Gazebo,进行仿真
在./mbot_description/urdf文件夹中创建mbot_with_sensor_gazebo_automobile.xacro文件,代码如下:
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mbot_description)/urdf/mbot_base_gazebo_automobile.xacro" />
<xacro:include filename="$(find mbot_description)/urdf/sensors/camera_gazebo.xacro" />
<xacro:include filename="$(find mbot_description)/urdf/sensors/lidar_gazebo.xacro" />
<xacro:property name="camera_offset_x" value="0.17" />
<xacro:property name="camera_offset_y" value="-0.05" />
<xacro:property name="camera_offset_z" value="0.10" />
<xacro:property name="lidar_offset_x" value="0" />
<xacro:property name="lidar_offset_y" value="0" />
<xacro:property name="lidar_offset_z" value="0.105" />
<!-- Camera -->
<joint name="left_camera_joint" type="fixed">
<origin xyz="${camera_offset_x} ${camera_offset_y} ${camera_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="left_camera_link"/>
</joint>
<joint name="right_camera_joint" type="fixed">
<origin xyz="${camera_offset_x} ${-camera_offset_y} ${camera_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="right_camera_link"/>
</joint>
<xacro:usb_camera prefix="left_camera"/>
<xacro:usb_camera prefix="right_camera"/>
<!-- Lidar-->
<joint name="lidar_joint" type="fixed">
<origin xyz="${lidar_offset_x} ${lidar_offset_y} ${lidar_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="laser_link"/>
</joint>
<xacro:rplidar prefix="laser"/>
<mbot_base_gazebo/>
</robot>
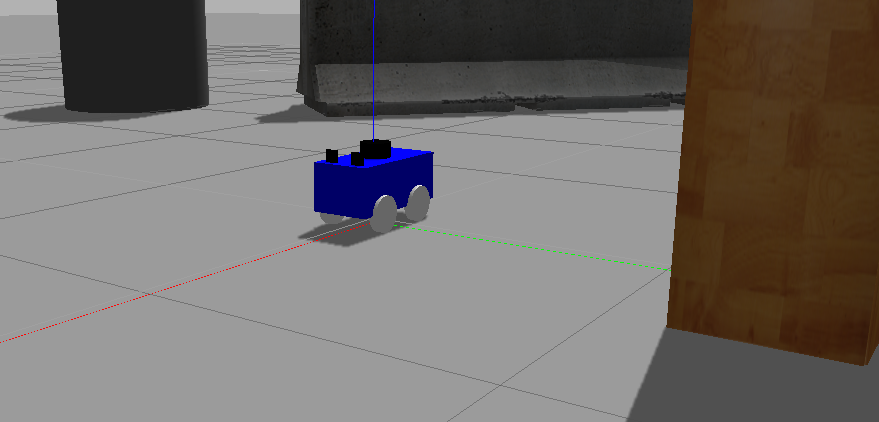
运行效果如下:
2.2 激光雷达
激光雷达的参数文件为./mbot_description/urdf/sensors/lidar_gazebo.xacro,内容如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="laser">
<xacro:macro name="rplidar" params="prefix:=laser">
<!-- Create laser reference frame -->
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<cylinder length="0.06" radius="0.05"/>
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link">
<sensor type="ray" name="rplidar">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3</min_angle>
<max_angle>3</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>laser_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
2.3 相机
相机的参数文件为./mbot_description/urdf/sensors/camera_gazebo.xacro,内容如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="camera">
<xacro:macro name="usb_camera" params="prefix:=camera">
<!-- Create laser reference frame -->
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link">
<sensor type="camera" name="camera_node">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>1280</width>
<height>720</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="gazebo_camera" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>${prefix}/camera</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
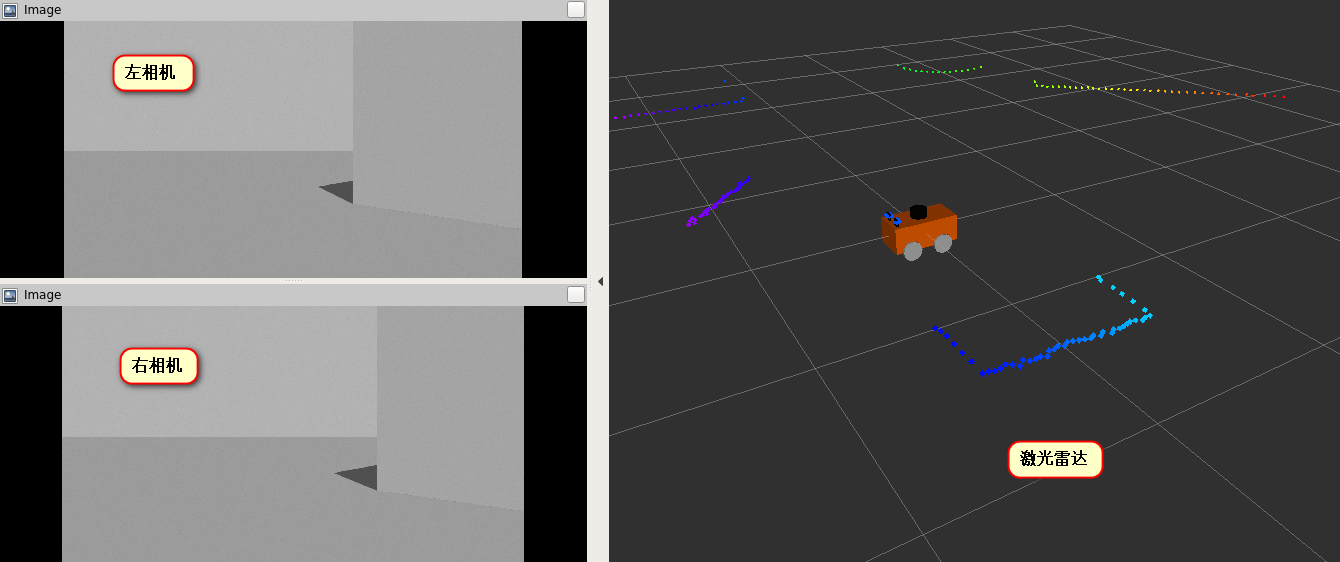
2.4 Rviz中显示相机和激光雷达的数据

 浙公网安备 33010602011771号
浙公网安备 33010602011771号