
状态空间_1
状态空间概述
问题记录:
-
为什么状态空间方程中输出,状态倒数等于输入和状态之和而不是乘或者别的符号?
-
控制器,观测器形式的状态空间方程咋来的?,形式如何理解?为什么两者的关系是转置?什么是对偶?
-
对于MIMO系统,是否存在唯一的传递函数矩阵?
不是,等于原来的转置
听课记录:
研究一个系统最开始是建模,而现控相比于古典控制建模部分出现了较大改变。而这种改变导致系统的描述更加简单,数值计算更加方便。
现代控制系统在古典控制的基础上增加了一个研究因素——状态。所以我们要把表达式抽象成这样:
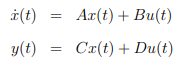
第一个式子表示下一个状态和当前状态和输入的关系
同时继承控制的必须研究的内容,输出和输入和当前状态的关系
用当前状态和未来状态来表示我们的新研究因素:状态
对比于古典控制需注意:
- 一个系统的状态空间方程不唯一,但是系统的传递函数唯一
- 状态空间方程研究时域
一个状态空间方程可以表示成对应系统传递函数矩阵。
结果如下:
同时也引出,一个MIMO系统的表示用状态空间方程来建模更加简略,但是使用传递函数就更为复杂。比如一个5输入8输出的传递函数矩阵大小是8*5
接下来介绍状态空间表达式的书写
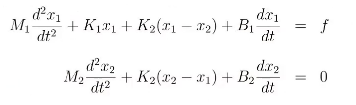
- 找出微分方程
- 找出状态变量个数,写出状态空间方程组
- 写出ABCD矩阵
主要就是把一个高阶的微分方程变成一阶线性微分方程组,也就是把高阶微分变成用状态变量来表示。掌握这个就可以进行状态空间表示。
同时要明确每个矩阵的行数列数和各个变量数的关系。
- A矩阵的行数代表状态变量个数,列数也是
- B矩阵的行数代表状态变量个数,列数代表输入的个数
- C矩阵行数代表输出的个数,列代表状态变量
- D行数输出,列输入
只要记住矩阵左边是需要变换的线性空间,右边是目标线性空间,行数代表维数,列数代表变量个数即可
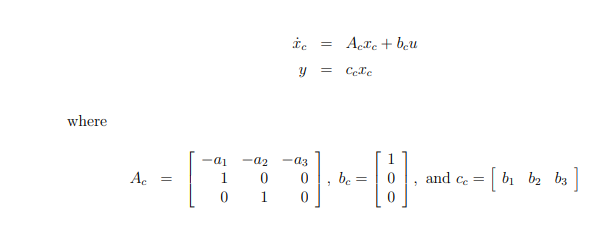
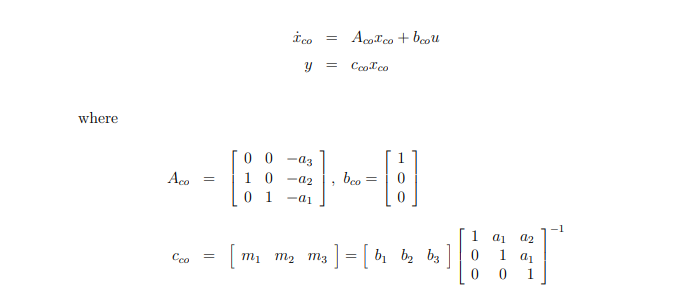
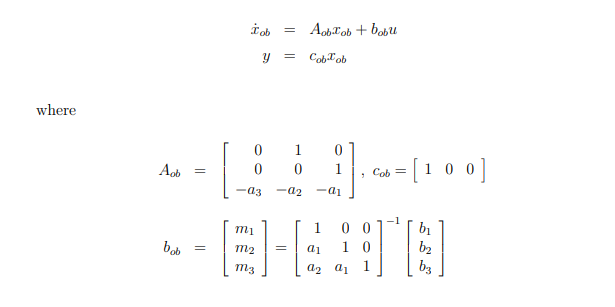
接下来介绍一些特殊的状态空间方程形式. 之前提到过状态方程可以有很多种实现方式,学者们提出了方便控制器设计,检测器设计的状态空间矩阵设计
控制器对偶形式:
传感器对偶形式
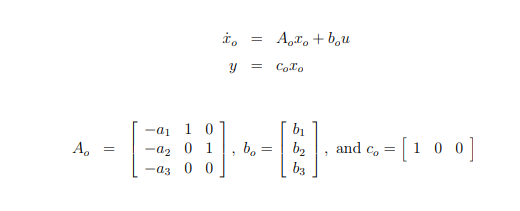
控制能力对偶性质
可观测性对偶性质
总结:
学习思路:
古典控制与现代控制的区别
介绍现代控制的基础--建模方式--状态空间建模的一般形式
如何将上述一般形式转换成传递函数
如何列出状态空间方程
状态空间方程各矩阵的表达的含义
各种特殊的状态空间方程

