
6.1 机器学习之数学基础
机器学习之数学基础[1][2][3][4]
基础概念
极限
-
对于数列 $ { u_n} $,如果当n无限增大时,其通项无限接近于一个常数A,则称该数列以A为称数列收敛于A,否则称数列为发散。
$ {\lim\limits_{n\to\infty}u_n = A},或 \quad u_n\rightarrow A ,(n\rightarrow\infty) $
-
$ \lim\limits_{x\to x_0} f(x) = A 的充要条件是\lim\limits_{x\to x_0^-} f(x) = \lim\limits_{x\to x_0^+} f(x) = A $
导数
- 如果平均变化率的极限存在,
则称此极限为函数y=f(x)在点x_0处的导数,

梯度
偏导数
- 设函数z=f(x,y)在点(x0, y0)的某个领域内有定义,对于y=y0,一元函数f(x, y0)在点x=x0处可导,即极限
则称A为函数:$ z=f(x,y)在点(x_0,y_0)处关于自变量X的偏导数,记作: $
方向导数
- 如果函数的增量与这两点距离的比例存在,则称此为在P点沿着L的方向导数:$ \frac{\partial f}{\partial l} = \lim\limits_{\rho\to0} \frac{f(x+\Delta x, y+\Delta y)-f(x,y)}{\rho} $
- 如果函数z=f(x,y)在点P(x,y)是可微分的,那么在该点沿任意方向L的方向导数都存在:$ \frac{\partial f}{\partial l} = \frac{\partial f}{\partial x} \cos\varphi + \frac{\partial f}{\partial y} \sin\varphi $。
求函数$ z=xe^{2y} $在点P(1,0)处沿从点P到点Q(2,-1)的方向的方向导数
解:
这里方向 $ \vec{l} $ 即为 $ \vec{PQ}={1,-1}$ ,因此x轴到方向 $ \vec{l} $ 的转角$ \varphi=-\frac \pi4 $\[\because \quad \left. \frac{\partial z}{\partial x} \right | _{(1,0)}=\left. e^{2y} \right |_{(1,0)} =1; \; \left. \frac{\partial z}{\partial y} \right | _{(1,0)}=\left. 2xe^{2y} \right |_{(1,0)} = 2, \]所求方向导数:
\[\frac{\partial f}{\partial l} = \frac{\partial f}{\partial x} \cos(-\frac \pi4) + \frac{\partial f}{\partial y} \sin(-\frac \pi4)=-\frac {\sqrt{2}}{2} \]
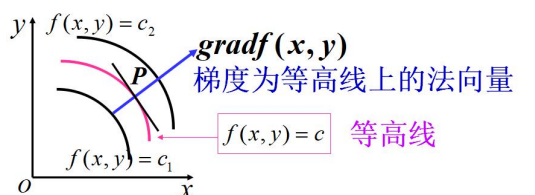
梯度
- 函数z=f(x,y)在平面域内具有连续的一阶偏导数,对于其中每一个点P(x,y)都有向量
-
$ \vec{e}=\cos\varphi\vec{i}+\sin\varphi\vec{j} $ 是方向L上的单位向量
\[\frac{\partial f}{\partial l} = \frac{\partial f}{\partial x} \cos\varphi + \frac{\partial f}{\partial y} \sin\varphi=\{\frac{\partial f}{\partial x},\frac{\partial f}{\partial y}\}\cdot\{\cos\varphi, \sin\varphi\} = gradf(x,y)\cdot\vec{e} = |gradf(x,y)|\cos\theta \]\[\theta=(gradf(x,y),\vec{e}) ,可见,只有 \cos(gradf(x,y), \vec{e}) =1 时, \frac{\partial f}{\partial l} 才有最大值 \]
$ 设u=xyz+z^2+5 , 求grad u $, 并求在点M(0,1,-1)处方向导数的最大(小)值。
解:
\[\because \frac{\partial u}{\partial x} = yz, \frac{\partial u}{\partial y} = xz, \frac{\partial u}{\partial z} = xy+2z, \]\[\therefore \left. gradu \right |_{(0,1,-1)}=\left. (yz,xz,xy+2z) \right |_{(0,1,-1)} = (-1,0,-2) \]从而:
\[max\lbrace\frac{\partial u}{\partial x}|_M \rbrace=\lVert gradu \rVert = \sqrt{5} \]\[min\lbrace\frac{\partial u}{\partial x}|_M \rbrace=\lVert gradu \rVert = -\sqrt{5} \]
微积分
牛顿-莱布尼茨公式
-
如果F(x)是连续函数f(x)在区间[a,b]上的一个原函数,则:
$ \int_a^b f(x)dx = F(b)-F(a) $有$ f(x)\in C[a,b], 且F^\prime(x)=f(x) $, 则:
\[\underbrace{\int_a^b f(x)dx=f(\xi)(b-a)}_{积分中值定理}=\underbrace{F^\prime(\xi)(b-a)=F(b)-F(a)}_{微分中值定理} \] -
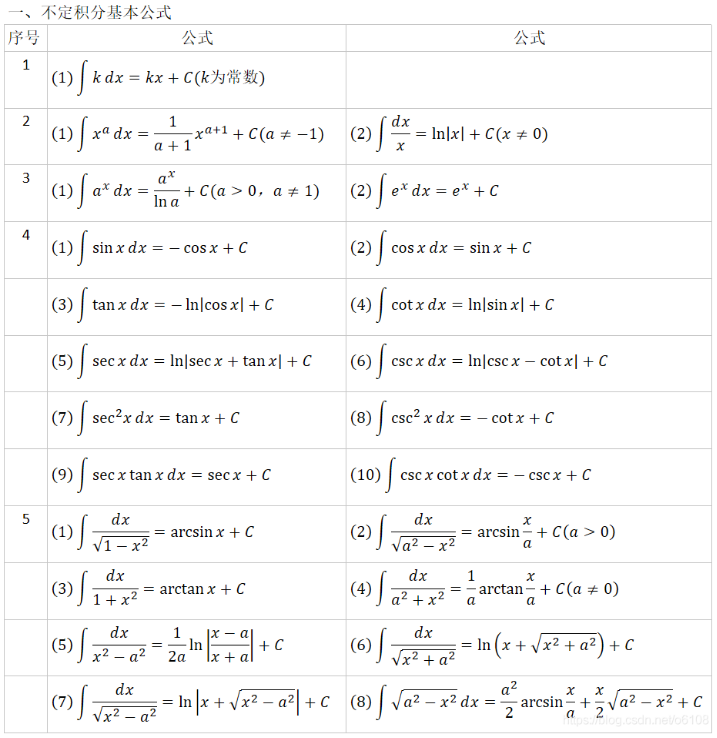
不定积分基本公式(原函数):
![image-20220222123010208]()
泰勒多项式与麦克劳林公式
-
\[P_n(x)=f(x_0)+f^\prime(x_0)(x-x_0)+\frac{f^{\prime\prime}(x_0)}{2!}(x-x_0)^2+\cdots+\frac{f^{(n)}(x_0)}{n!}(x-x_0)^n \]
称为f(x)在x0关于(x-x0)的n阶泰勒多项式
-
麦克劳林公式:
\[f(x)=f(0)+f^\prime(0)x+\frac{f^{\prime\prime}(0)}{2!}(x)^2+\cdots+\frac{f^{(n)}(0)}{n!}(x)^n+\frac{f^{(n+1)(\theta x)}}{(n+1)!}x^{n+1} \; (0<\theta<1) \]近似可得:
拉格朗日乘子法
-
函数z=f(x,y)在条件$ \varphi(x,y)=0 $条件下的极值
- 构造函数:$ F(x,y)=f(x,y)+\lambda\varphi(x,y) ,其中 \lambda $ 为拉格朗日乘数\[\begin{cases} f_x(x,y)+\lambda\varphi_x(x,y)=0 \\ f_y(x,y)+\lambda\varphi_y(x,y)=0 \\ \varphi(x,y)=0 \end{cases} \]其中(x,y)就是极值点坐标
- 构造函数:$ F(x,y)=f(x,y)+\lambda\varphi(x,y) ,其中 \lambda $ 为拉格朗日乘数
-
多个自变量,函数$ u=f(x,y,z,t) 在条件\varphi(x,y,z,t)=0, \psi(x,y,z,t)=0下的极值 $
-
构造函数:$ F(x,y,z,t)=f(x,y,z,t)+\lambda_1\varphi(x,y,z,t)+\lambda_2\psi(x,y,z,t) $
其中$ \lambda_1 , \lambda_2 $为拉格朗日乘数,同样通过偏导为0以及条件求解。
-
1.函数 $ u=x3y2z $ 在约束条件:x,y,z之和为12,求其最大值
2.在第一卦限内作椭球面 $ \frac{x2}{a2}+\frac{x2}{a2}+\frac{x2}{a2}=1 $
的切平面,使切平面与三个坐标面所转成的四面体体积最小,求切点坐标。
矩阵
-
\[AX=b \quad \begin{cases} a_{11}x_1+a_{12}x_2+\cdots+a_{1n}x_n =b_1 \\ a_{21}x_1+a_{22}x_2+\cdots+a_{2n}x_n =b_1 \\ \cdots\cdots \\ a_{m1}x_1+a_{m2}x_2+\cdots+a_{mn}x_n =b_1 \\ \end{cases} \]
-
矩阵乘法没有交换律
-
矩阵转置:行列调换,$ (AT)T=A $
-
对称矩阵:$ A^T = A $,A即为对称矩阵
-
逆矩阵:n阶方阵A,如果存在n阶方阵B,使得AB=BA=I(单位阵),则:$ B=A^{-1}$
-
矩阵的秩:矩阵中最大不相关的向量个数即为矩阵的秩
-
向量的长度:$ \lVert x \rVert=\sqrt{[x,x]}=\sqrt{x_12+x_22+\cdots+x_n^2}\geq 0 $
-
向量的正交:两两正交的非零向量组的向量组成为正交向量组。$ a_1\bot a_2 $
特征值与SVD矩阵分解
-
若σ是线性空间V的线性变换,σ对V中某非零向量x的作用是伸缩:σ(x)=aζ,则称x是σ的属于a的特征向量,a称为σ的特征值。位似变换σk(即对V中所有a,有σk(a)=kα)使V中非零向量均为特征向量,它们同属特征值k;而旋转角θ(0<θ<π)的变换没有特征向量。可以通过矩阵表示求线性变换的特征值、特征向量。
-
特征值表达了重要程度且和特征向量所对应,那么特征值大的就是主要信息了
-
奇异值分解( The singular value decomposition )
一个非方矩阵$ A_{n\times d} $,经过SVD分解后由3个矩阵相乘来表示: $ A_{n\times d} = U_{n\times r}\sum_{r\times n}V_{d\times d}^T $。
使用另一组正交基$ u_1、u_2表示Mv_1和Mv_2的方向 $
$σ1 和 σ2分别表示这不同方向向量上的模: Mv_1=\sigma_1u_1 ; Mv_2=\sigma_2u_2 $
对于向量X在这组基中的表示:$ x=(v_1\cdot x)v_1+(v_2\cdot x)v_2 $ $ (v\cdot x=v^Tx) $
\[Mx=(v_1\cdot x)Mv_1+(v_2\cdot x)Mv_2 \\ Mx=(v_1\cdot x)\sigma_1u_1+(v_2\cdot x)\sigma_2u_2 \\ Mx=u1\sigma_1v_1^Tx+u_2\sigma_2v_2^Tx \\ M=u_1\sigma_1v_1^T+u_2\sigma_2v_2^T \\ 化简即得:\\ M = U\Sigma V^T \]
随机变量
- $ f(x_i)=P(X=x_i) $为离散型随机变量的概率函数
- X为连续随机变量,X在任意区间(a,b]上的概率可以表示为:
$ P(a<X\leq b) = \int_a^b f(x) dx $
其中f(x)就叫做X的概率密度函数
极大似然估计
-
给定联合样本值x关于参数$ \theta 的函数:L(\theta |x)=f(x|\theta) $
x是随机变量X取得的值,$ \theta $是未知的参数
$ f(x|\theta)是密度函数,表示给定\theta下的联合密度函数$
似然函数是关于$ \theta $的函数而密度函数是关于x的函数
-
极大似然估计:
离散型样本:$ L(\theta)=\prod_{i=1}^np(x_i;\theta) $连续型样本:$ L(\theta)=\prod_{i=1}^nf(x_i;\theta) $
极大似然估计:$ L(x_1,x_2,\cdots,x_n;\hat\theta)=max_{\theta\in\Theta} L(x_1,x_2,\cdots,x_n;\theta) $
-
极大似然估计求解:
- 构造似然函数:$ L(\theta) $
- 取对数:$ lnL(\theta) $
- 求偏导:$ \frac{dlnL}{d\theta}=0,得解\theta $
概率论基础
-
条件概率:$ P(B|A)=\frac{P(AB)}{P(A)} $
-
n重伯努利试验:$ P_n(k)=C_nkpkq^{n-k},, \quad k=0,1,\cdots,n\quad q=1-p $
-
二维随机变量(X,Y)的分布函数F(x,y)如果存在非负函数f(x,y)有:
$ F(x,y)=\int_{-\infty}y\int_{-\infty}x{f(u,v)dudv} $
称f(x,y)为其概率密度
-
连续型的边缘概率密度:
对于连续型随机变量(X,Y),概率密度为f(x,y)。X,Y的边缘概率为:
$ f_x(x)=\int_{-\infty}^{+\infty}f(x,y)dy \quad f_y(y)=\int_{-\infty}^{+\infty}f(x,y)dx $$ F_x(x)=\int_{-\infty}^{+\infty}f_x(t)dt \quad F_y(y)=\int_{-\infty}^{+\infty}f_y(t)dt $
-
期望
连续型随机变量X的概率密度为f(x),若积分$\int_{-\infty}^{+\infty}xf(x)dx $ 绝对收敛,则称积分的值为X的数学期望:$ E(X)=\int_{-\infty}^{+\infty}xf(x)dx $
对于二维连续型随机变量(X,Y)的概率密度z=g(x,y):
$ E(Z)=E(g(X,Y))=\int_{-\infty}{+\infty}\int_{-\infty}g(x,y)dxdy $
-
方差
X为随机变量,如果$ E[X-E(X)]^2 $存在,则称为方差:$ D(X)=E[X-E(X)]2=E(X2)-[E(X)]^2 $
-
马尔科夫不等式:$ P(X\geq a)\leq\frac{E(X)}{a}\quad X\geq0, a>0 $
-
切比雪夫不等式:
$ P{|X-E(X)|\geq\epsilon}\leq\frac{\sigma2}{\epsilon2} $
$ P{|X-E(X)|<\epsilon}\geq 1-\frac{\sigma2}{\epsilon2} $
常用几种分布
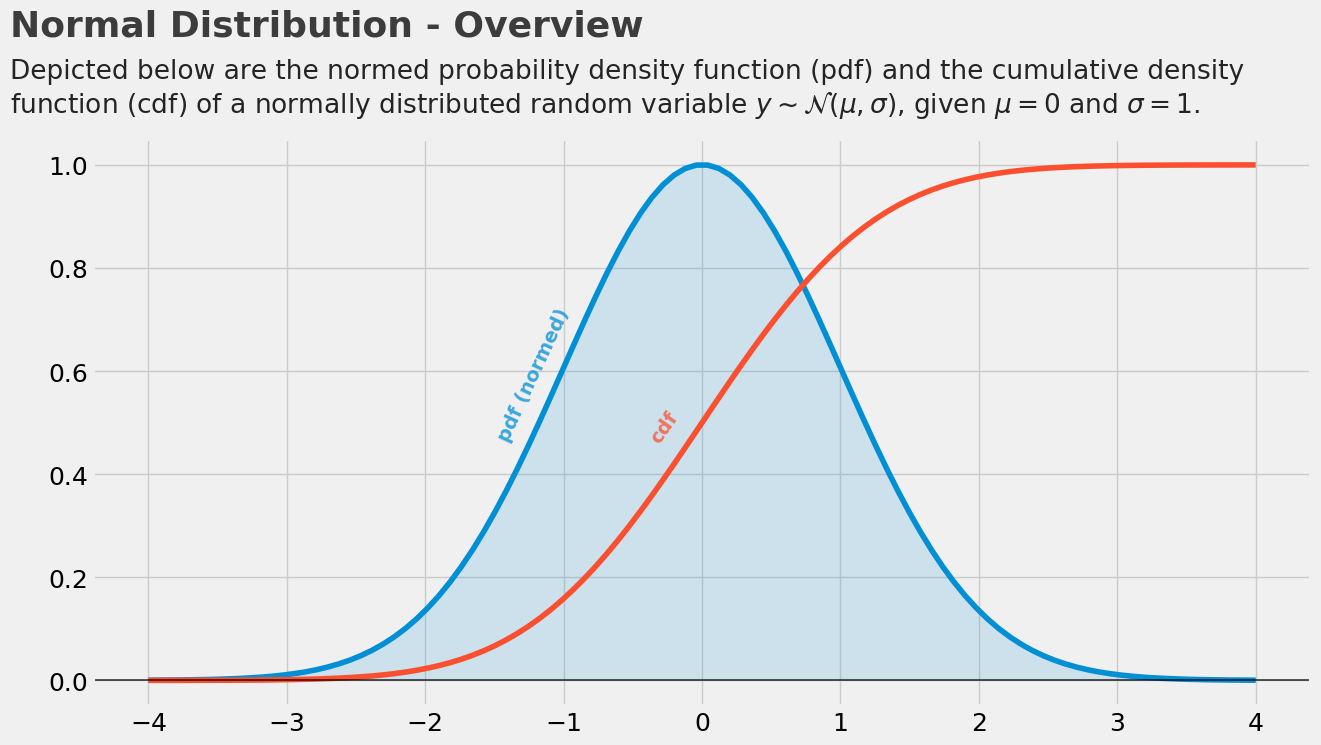
正态分布(Normal Distribution)
若随机变量X服从一个数学期望为μ、方差为σ2的正态分布,记为N(μ,σ2)。其概率密度函数为正态分布的期望值μ决定了其位置,其标准差σ决定了分布的幅度。当μ = 0,σ = 1时的正态分布是标准正态分布。
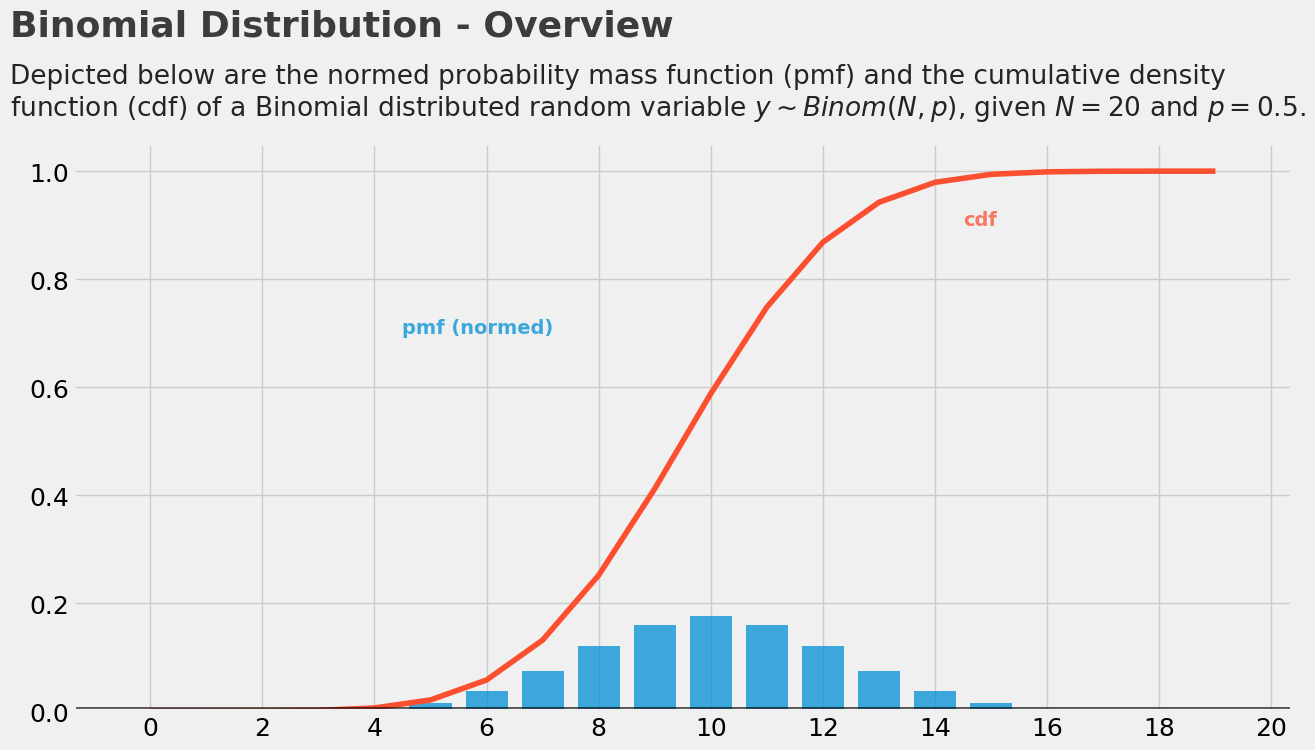
二项式分布(Binomial Distribution)
-
每个试验都是独立的。
-
在试验中只有两个可能的结果:成功或失败。
-
总共进行了n次相同的试验。
-
所有试验成功和失败的概率是相同的。 (试验是一样的)
\(N \cdot p\) 表示分布的均值
泊松分布(Poisson Distribution)
-
任何一个成功的事件都不应该影响另一个成功的事件。
-
在短时间内成功的概率必须等于在更长的间内成功的概率。
-
时间间隔很小时,在给间隔时间内成功的概率趋向于零。
泊松分布中使用了这些符号:
-
λ是事件发生的速率
-
t是时间间隔的长
-
X是该时间间隔内的事件数。
-
其中,X称为泊松随机变量,X的概率分布称为泊松分布。
-
令μ表示长度为t的间隔中的平均事件数。那么,µ = λ*t。
\[f(x|\lambda) = \frac{\lambda^{x}e^{-\lambda}}{x!} \]where \(\lambda\) denotes the mean of the distribution.
均匀分布
对于投骰子来说,结果是1到6。得到任何一个结果的概率是相等的,这就是均匀分布的基础。与伯努利分布不同,均匀分布的所有可能结果的n个数也是相等的。

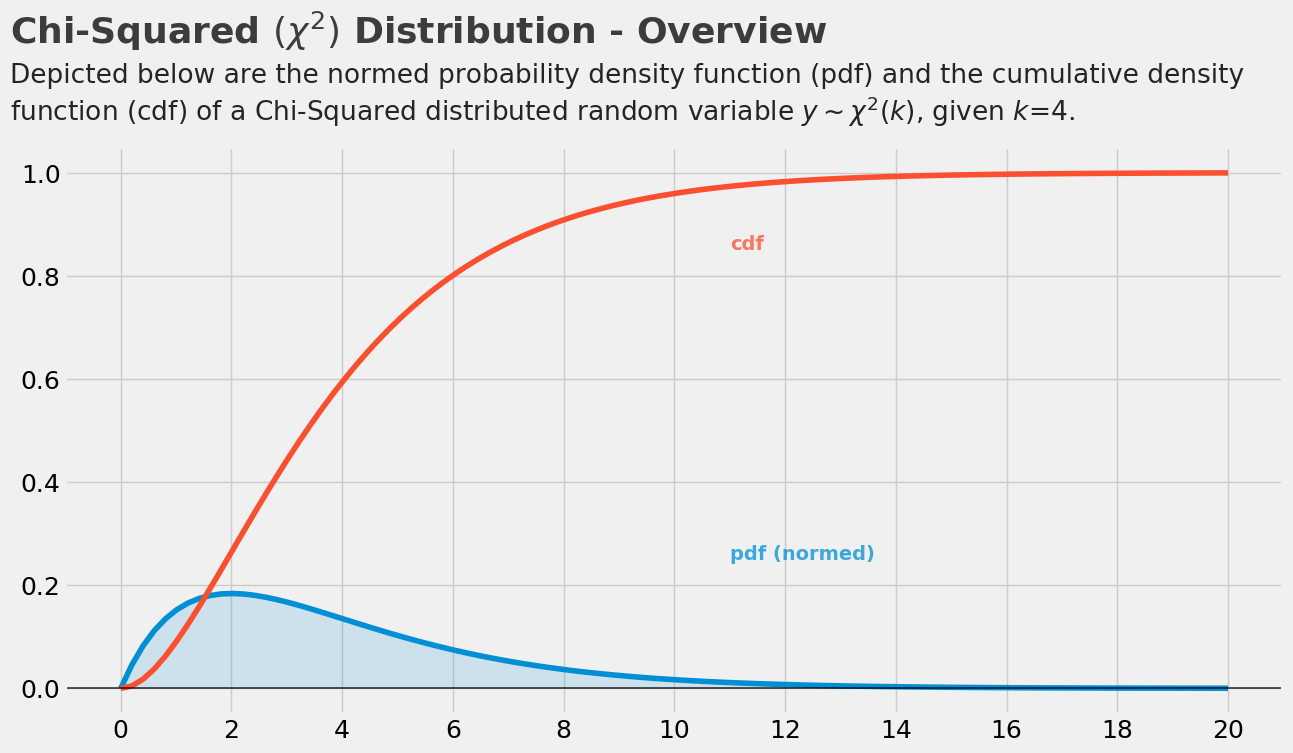
卡方分布(chi-square distribution)
通俗的说就是通过小数量的样本容量去预估总体容量的分布情况
卡方检验就是统计样本的实际观测值与理论推断值之间的偏离程度
若n个相互独立的随机变量ξ₁,ξ₂,...,ξn ,均服从标准正态分布(也称独立同分布于标准正态分布),则这n个服从标准正态分布的随机变量的平方和构成一新的随机变量,其分布规律称为卡方分布(chi-square distribution)
where $ \Gamma(n) = (n-1)! $ and \(k\) denotes the degrees of freedom.
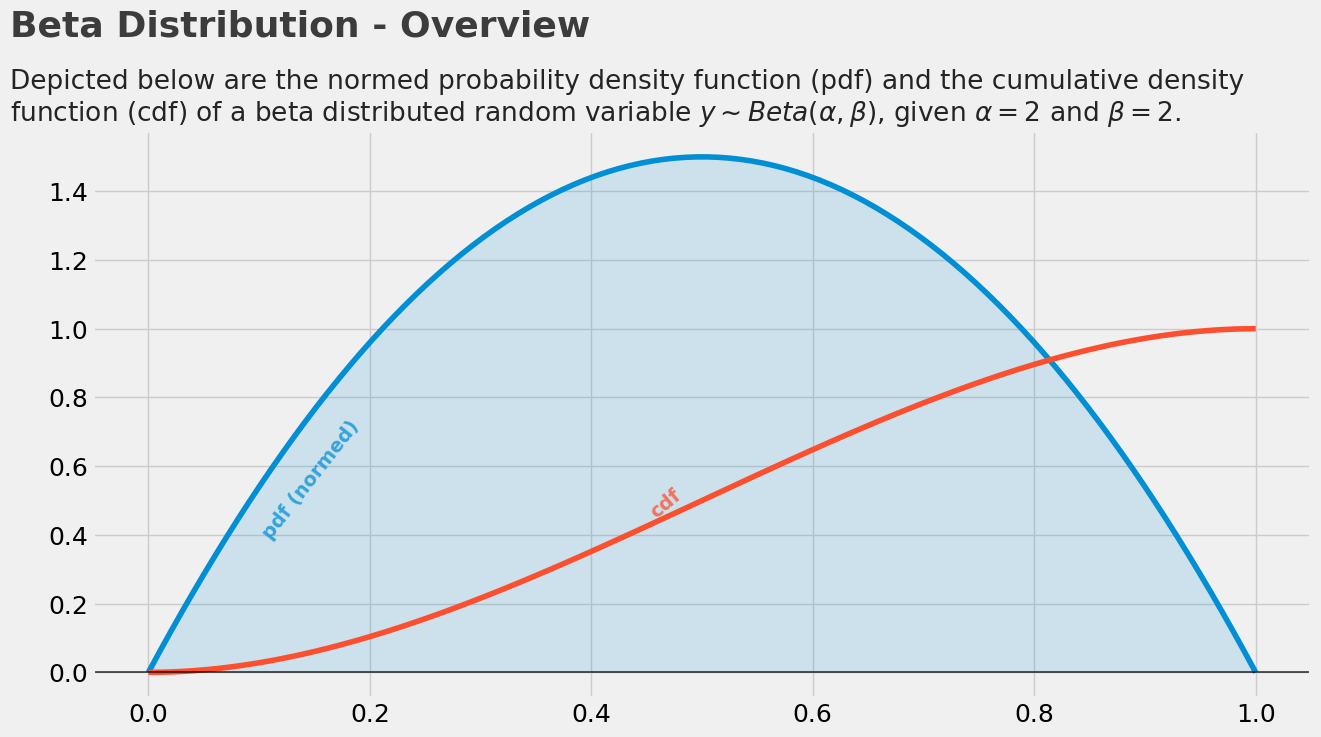
beta分布
beta分布可以看作一个概率的概率分布,当你不知道一个东西的具体概率是多少时,它可以给出了所有概率出现的可能性大小
where
and
\(\alpha\) and \(\beta\) 可以当成是我们成功,失败的次数。
核函数变换
线性核函数
- Linear核函数对数据不做任何变换。$ K(x_i,x_j)=x_i^Tx_j $
高斯核函数
- $ K(X,Y)=exp{-\frac{|X-Y|2}{2\sigma2}} $
熵与激活函数
- 熵:物体内部的混乱程度。(一件事发生的不确定性)
- $ H(X)=-\sum_{x\in X}P(x)logP(x) $
- 常见的激活函数:Sigmoid Tanh Relu 等
- Sigmoid 函数:是常用的非线性的激活函数, 能够把连续值压缩到0-1区间上。缺点:杀死梯度,非原点中心对称。输出值全为整数会导致梯度全为正或者全为负,优化更新会产生阶梯式情况
- Tanh函数:原点中心对称,输出在-1到1之间,梯度消失现象依然存在
- Relu函数:公式简单实用,解决了梯度消失现象,计算速度更快
- Leaky ReLU:解决了Relu会杀死一部分神经元的情况

 浙公网安备 33010602011771号
浙公网安备 33010602011771号