


【转载】4412开发板制作智能小车入门篇系列人工智能
如果你也是个软件开发者,也希望自己多少能懂一点硬件知识,软硬兼修的话,可以来制作一个智能小车。期间会遇到很多硬件相关的术语或者专有名词,优秀的你,肯定会不懂就查不懂就学的,这是最重要的过程。
智能小车作为智能机器人的雏形,它通过内外传感器感知外部环境信息和自身状态,完成相应动作。是一个在复杂环境中实现自主作业的自动控制系统,属于陆地自主行驶车辆的一种。它涉及到开发板、传感器、信息融合、通信接口、导航控制、人工智能以及自动控制等一系列高新技术。设计以迅为ARM开发板为核心,可以实现自动避障、远程蓝牙操控等功能,以应对可能出现的复杂环境。另外本设计在开发时就预留了其他功能接口,可以方便的实现改装升级,例如加入视频监控模块、寻迹模块等,都很方便。
系统总体设计
系统的功能主要依靠四个模块来完成,分别为蓝牙通讯模块,液晶显示模块,直流减速电机驱动模块,自动避障模块。设计以Android手机为控制平台,通过蓝牙接收模块与手机端蓝牙连接配对,实现手机与开发板的通讯并通过命令来控制小车行动。一般情况下小车能够自动探索。电机驱动模块同时驱动两个电机,通过开发板控制两个电机分别正、反转来实现智能小车前进、后退、左右转向及掉头,每一步命令开始或动作结束,都会在液晶显示模块和手机端显示出来,易于控制。
系统硬件
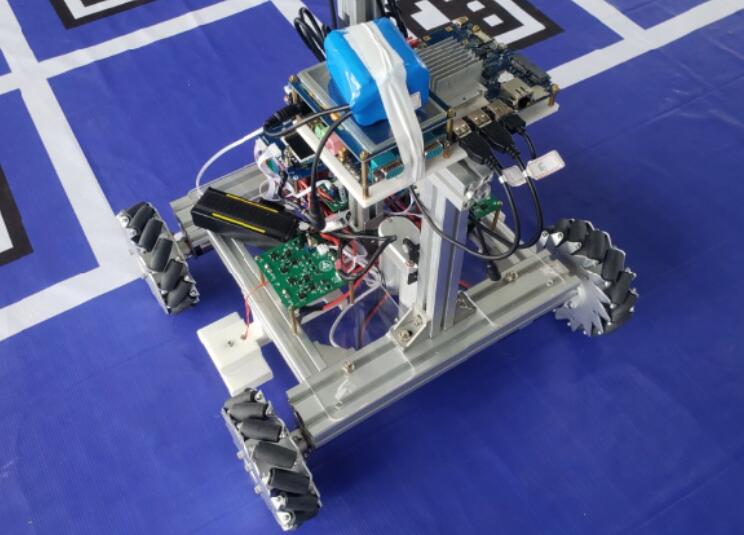
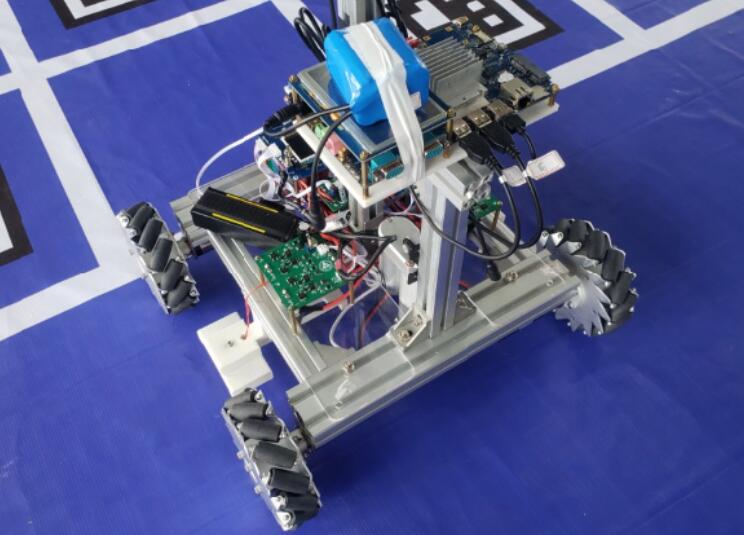
系统主要硬件包括:迅为4412开发板、4.3寸显示屏、 电机驱动模块等,另外本设计采用手机来实现远程控制。
软件设计
接上电源后, 程序开始初始化设置, 蓝牙一直在检测是否收到指令, 如果接收到了指令,则会根据接收的指令执行,否则会一直在循环检测。当进入了自动探索模式后, 蓝牙模块停止工作,小车根据红外传感器的返回数据行动。
5 实验成果分析
小车在实际检测过程中基本实现了设计功能,在自动避障模式下,智能小车能灵活地实现避障效果。在蓝牙模式下,小车也能正常的按照指令前进、后退和转向,基本实现了预期功能。
关注“迅为电子”微信公众号,不定期分享教程、资料和行业干货及产品一线资料。
