

SSD网络结构
SSD算法,其英文全名是Single Shot MultiBox Detector。
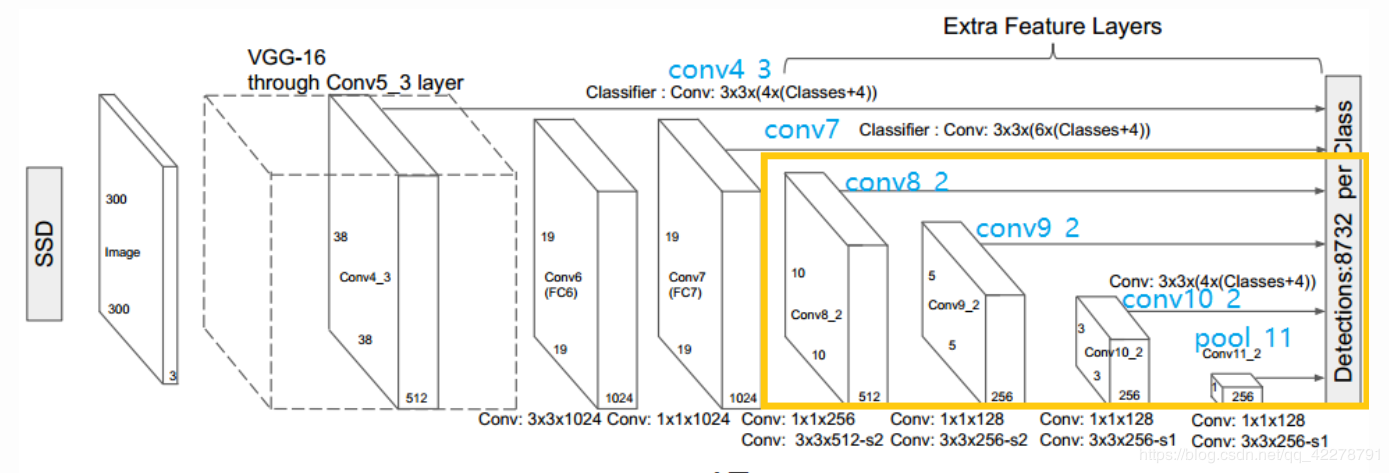
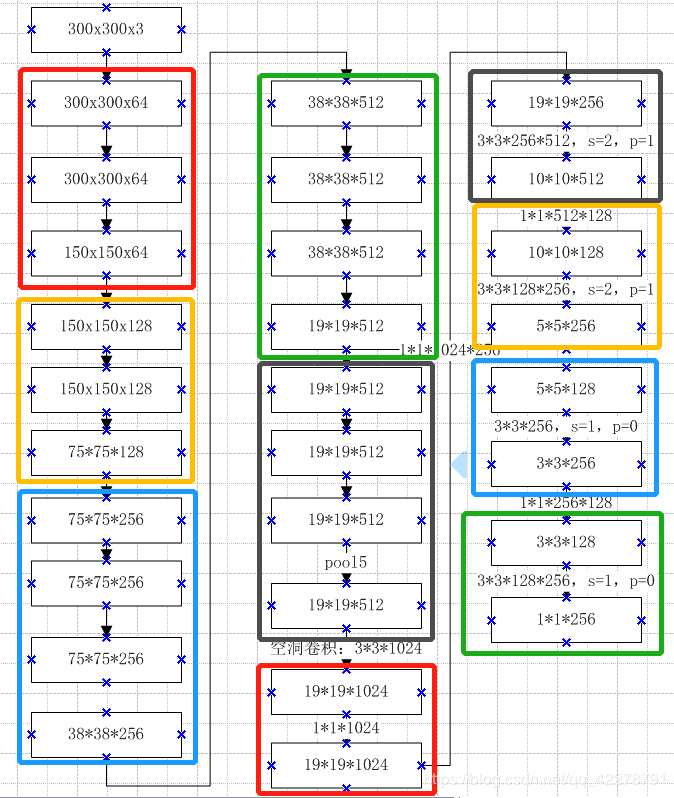
SSD的网络结构流程如下图所示:
SSD总共11个block,相比较于之前的VGG16,改变了第5个block的第4层,第6、7、8卷积层全部去掉,分别增加了红框、黑框、黄框、蓝框。
其tensorflow代码如下:

with tf.variable_scope(scope, 'ssd_300_vgg', [inputs], reuse=reuse): # Original VGG-16 blocks. net = slim.repeat(inputs, 2, slim.conv2d, 64, [3, 3], scope='conv1') end_points['block1'] = net net = slim.max_pool2d(net, [2, 2], scope='pool1') # Block 2. net = slim.repeat(net, 2, slim.conv2d, 128, [3, 3], scope='conv2') end_points['block2'] = net net = slim.max_pool2d(net, [2, 2], scope='pool2') # Block 3. net = slim.repeat(net, 3, slim.conv2d, 256, [3, 3], scope='conv3') end_points['block3'] = net net = slim.max_pool2d(net, [2, 2], scope='pool3') # Block 4. net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv4') end_points['block4'] = net net = slim.max_pool2d(net, [2, 2], scope='pool4') # Block 5. net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv5') end_points['block5'] = net #注意处 net = slim.max_pool2d(net, [3, 3], stride=1, scope='pool5') # Additional SSD blocks. # Block 6: let's dilate the hell out of it! #注意处 net = slim.conv2d(net, 1024, [3, 3], rate=6, scope='conv6') end_points['block6'] = net net = tf.layers.dropout(net, rate=dropout_keep_prob, training=is_training) # Block 7: 1x1 conv. Because the fuck. #注意处 net = slim.conv2d(net, 1024, [1, 1], scope='conv7') end_points['block7'] = net net = tf.layers.dropout(net, rate=dropout_keep_prob, training=is_training) # Block 8/9/10/11: 1x1 and 3x3 convolutions stride 2 (except lasts). end_point = 'block8' with tf.variable_scope(end_point): net = slim.conv2d(net, 256, [1, 1], scope='conv1x1') #注意点:实际上相当于下面的卷积操作进行padding了 net = custom_layers.pad2d(net, pad=(1, 1)) net = slim.conv2d(net, 512, [3, 3], stride=2, scope='conv3x3', padding='VALID') end_points[end_point] = net end_point = 'block9' with tf.variable_scope(end_point): net = slim.conv2d(net, 128, [1, 1], scope='conv1x1') #注意点:实际上相当于下面的卷积操作进行padding了 net = custom_layers.pad2d(net, pad=(1, 1)) net = slim.conv2d(net, 256, [3, 3], stride=2, scope='conv3x3', padding='VALID') end_points[end_point] = net end_point = 'block10' with tf.variable_scope(end_point): net = slim.conv2d(net, 128, [1, 1], scope='conv1x1') net = slim.conv2d(net, 256, [3, 3], scope='conv3x3', padding='VALID') end_points[end_point] = net end_point = 'block11' with tf.variable_scope(end_point): net = slim.conv2d(net, 128, [1, 1], scope='conv1x1') net = slim.conv2d(net, 256, [3, 3], scope='conv3x3', padding='VALID') end_points[end_point] = net
设计理念
参考博客:


【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 为什么说在企业级应用开发中,后端往往是效率杀手?
· 用 C# 插值字符串处理器写一个 sscanf
· Java 中堆内存和栈内存上的数据分布和特点
· 开发中对象命名的一点思考
· .NET Core内存结构体系(Windows环境)底层原理浅谈
· 为什么说在企业级应用开发中,后端往往是效率杀手?
· DeepSeek 解答了困扰我五年的技术问题。时代确实变了!
· 本地部署DeepSeek后,没有好看的交互界面怎么行!
· 趁着过年的时候手搓了一个低代码框架
· 推荐一个DeepSeek 大模型的免费 API 项目!兼容OpenAI接口!
2018-12-13 谓词、内建函数对象、函数对象适配器
2018-12-13 C++中rand()函数的用法
2018-12-13 函数对象
2018-12-13 STL容器共性机制和使用场景
2018-12-13 map/multimap