
CMOS图像传感器内部结构及工作原理
Cmos sensor stack (以手机相机为例)、sensor floorplan (平面构造图)、光子(Photon)与量子效率(quantum efficiency)、与量子效率QE有关的几个重要概念、感光过程、读取过程、Sensor动态范围、Sensor时序、Noise in Sensor、Crosstalk 对 noise的影响。
1. CMOS sensor内部结构
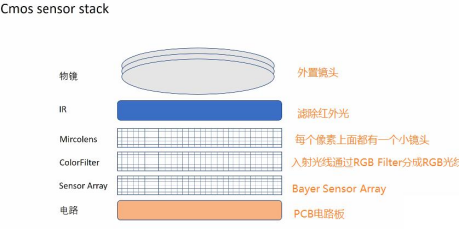
如上的构造和堆栈类似,光线进入物镜、通过IR cut(过滤掉红外光)、进入Micolens (sensor 每个像素上都有一个微镜头,更利于聚光)、ColorFilter(用来过滤出光线中的R\G\B颜色分量的滤光板)、透射到Sensor Array(像素阵列,是bayer格式)、最后是PCB电路板;
2. CMOS sensor整个平面构造图(floorplan)
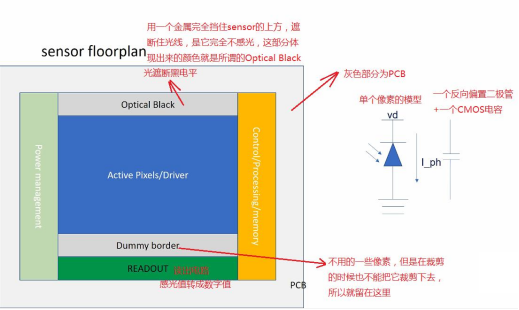
Optical Black:光遮断黑电平,用金属遮盖住这一部分的光线,让其完全不感光,体现出的颜色就是Optical black;
Dummy border: 不用的一部分像素;
Power management:电源管理模块;
Control/processing/memory:有OTP、....
READOUT:输出电路,把感光元器件的感光值变为数字值,给读出来;
每个有效像素都是下图中的结构(反向偏置的感光二极管+MOS电容),当在二极管上施加反向偏置电压时,他就变成了一个电容,加反向电压就是给电容充电,在二极管里面形成电荷,对于这种光电二极管来说,当反向充电充满后,由于光子的摄入,会导致内部激发出新的电子和供缺对,与原来充电形成的电子和供缺对进行配对放电,形成电流(l_ph),由于光子的激发产生的光电流,光电流经过右边的电容器累计电荷进行充电的动作,把电流变成电压输出出去,这就是一个基本的感光元件的基本结构,不止camear sensor,其他光谱产品也是用的类似结构;
3.光子(Photon)与量子效率(quantum efficiency)
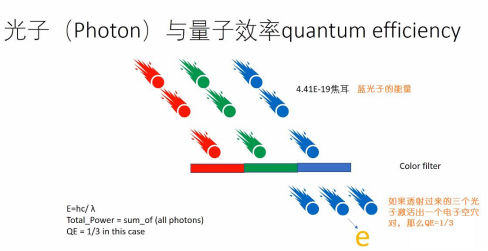
自然界中有不同频率的光线,如果我们简单来说分成RGB三种频率的光线,由于RGB的频率不同,所载有的能量也是不同的,以蓝光子为例,所载有的能量为4.41E-19焦耳,单个光子的能量E=hc/普朗克常量,那么一束光子的能量就等于所有光子能量的总和Total_Power=sum_of(all photons)。量子效率QE定义为,在一个camera sensor里面,经过color filter透射过来的光子转变成电荷的的效率,如果透射过来三个光子,产生出来一个电子空穴对,那么这个效率就是1/3。
光子能量:E=h(普朗克宏量)* c(光速)/ λ(光的波长)
总能量:Total_Power=sum_of (all photons) 所有光子能量的和 ;
量子效率:QE=1/3 in this case (如上图,3个光子形成1个电荷);
4.与量子效率QE有关的几个重要概念
QE是衡量某个颜色通道某个频率/波长的光子转换成电子的效率,在不同的波长上QE是不一样的。
camera sensor可以感受近红外的波段,这个不符合人眼视觉的感受的,需要用IR cut把近红外的波段去除掉,否则红色通道感光就会过强,这样出来的图像就会偏红。
像素不能够被一个颜色的光激发的现在叫crosstalk,理想情况crosstalk为0。
sensitivity感光度:同样的光子能够激发出的电荷
sensitivity=QE*pixel_size QE越高激发出来的电荷越多,pixel_size越大激发出来的电荷越多

5.感光过程
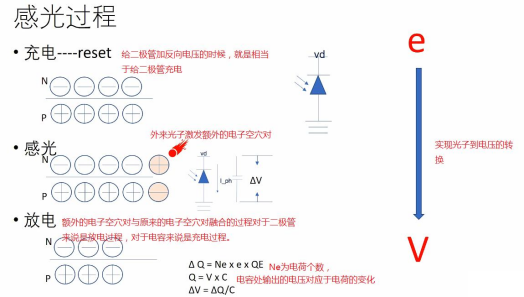
充电:先对光电二极管进行充电,N是电子,P是空穴(模拟电路中的两种载流子,带有负电荷和正电荷),当对二极管施加反向电压时,就相当于对二极管的容性进行充电,在二极管上就形成了如图,上面4个电子,下面4个空穴;
感光:当有光子进来时,光电二极管进行光电效应,就会激发一个电子和空穴的配对,就会与原来存在的电子和空穴进行融合(正负融合)就形成了光电流,光电流在mos电容上面形成充电效应,就会产生一个电压的变化,如果原来是0,现在增加的就是△V;
放电:从二极管的角度来看,电荷数也就是电子数和空穴数变少了(光子激发了电子和空穴的配对),△Q(电荷变化) =Ne (光子数) * e (单个电荷的能量) * QE (光电转换效率);Q (电容)= V * C(电容的大小),△V =△Q/C (电容处输出的电压,对应上了电荷的变化,也就是把光电效应和输出电压联系起来了,实现了光子到电压的转换,后面会再有进一步的电路再去处理电压值);
6.读取过程
如下,经过感光过程得到从e到v的变化,实现了感光程度可以量化的一个数值,接着信号经过模拟放大器放大,接着通过AD转换器,变为数字信号;
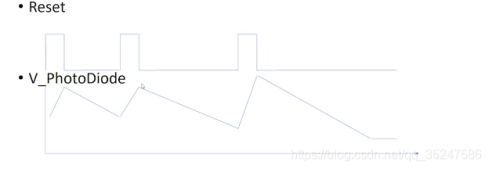
从时间轴上来看,Reset (充电过程),把所有光电二极管充满电,让其变为Full Well,接着等待一段时间进行感光(也就是曝光时间),最后读取电路,总共对Sensor操作的时间为:
Total_time =reset_teme + exposure_time +readout_time(reset_time比较小,有时计算不精确时,可以忽略掉);

7.动态范围
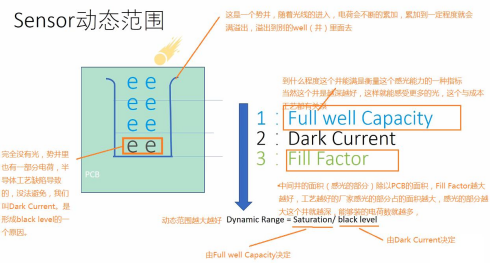
如图,中间部分为器件感光部分(用来存储光生电荷的电场,叫势阱),势阱越大。能容纳的电子越多,Sensor的动态范围则越大,这涉及到如下几个概念:
1、Full well Capacity:电荷累积到一定程度,势阱满了,电荷就会溢出,所以电荷累计到什么程度势阱会满的程度就叫Full well;
2、Dark Current: 势阱底部始终存在不感光的电荷,他是与物理器件、半导体的工艺缺陷,是无法避免的,也是造成black level的原因;
3、Fill Factor:是中间感光部分的阱的面积除以整个PCB的面积;
Dynamic Range = Saturation/black level (Saturation由Full well决定,black level由Dark Current决定,对WDR的sensor来说是一个非常重要的指标);
8.Sensor时序
每次曝光结束时,就会有相应的读出电路,把信号读出来,就可以得到当前光电二级管的电压值,这就是sensor操作的一个时序;
9.Noise in Sensor
时域噪声--- KTC Nosie(readout)、PhotonShoNoise、DarkCurrentNoise、PowerNoise
空域噪声--- DefectPixel、ROW/ColumnNoise、PRNU、DSNU
10、Crosstalk对 noise的影响


【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· [.NET]调用本地 Deepseek 模型
· 一个费力不讨好的项目,让我损失了近一半的绩效!
· .NET Core 托管堆内存泄露/CPU异常的常见思路
· PostgreSQL 和 SQL Server 在统计信息维护中的关键差异
· C++代码改造为UTF-8编码问题的总结
· 【.NET】调用本地 Deepseek 模型
· CSnakes vs Python.NET:高效嵌入与灵活互通的跨语言方案对比
· DeepSeek “源神”启动!「GitHub 热点速览」
· 我与微信审核的“相爱相杀”看个人小程序副业
· Plotly.NET 一个为 .NET 打造的强大开源交互式图表库