PID控制原理及其应用 - 笔记
今日感想:浅尝辄止,不自量力
PID 原理
算法原理:【Youtube】超清楚的PID控制官方科普教程(全集)(中英字幕)——MATLAB控制大法好
B站用户"萧然哔哩哔"的评论 截至 2020-04-15
以下视频均为B站搬运,可以正常访问
【官方教程】Simulink控制仿真初阶教程(全集)(中英字幕)MATLAB控制大法好
【官方教程】鲁棒控制_01:什么是鲁棒控制Robust(中英双字幕)
【Youtube】超清楚的PID控制官方科普教程(全集)(中英字幕)——MATLAB控制大法好
【官方教程】了解模型预测控制(MPC)与MATLAB仿真(全)(中英字幕)
【官方教程】MATLAB自动控制系统教程Control Systems in Practice(全)(中英字幕)
【官方教程】卡尔曼滤波器教程与MATLAB仿真(全)(中英字幕)
PID是对过去现在未来的计算,全名为 (proportional-integral-derivative control 即比例-积分-微分 控制)
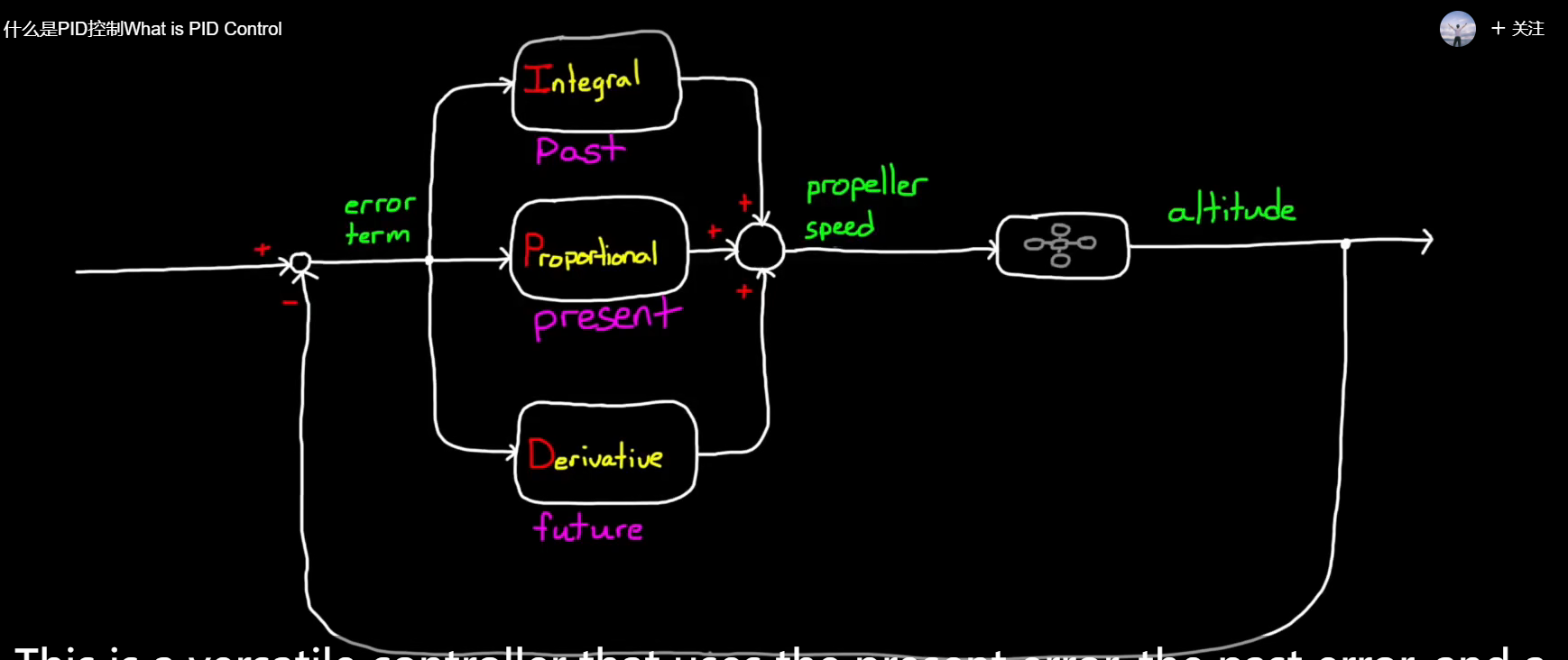
让我们哲学一点:
- Proportional 比例,用于调和现在
- Integral 积分,用于表示状态积累,即过去的种种
- Derivative 微分,用于表示变化,即未来的可能性
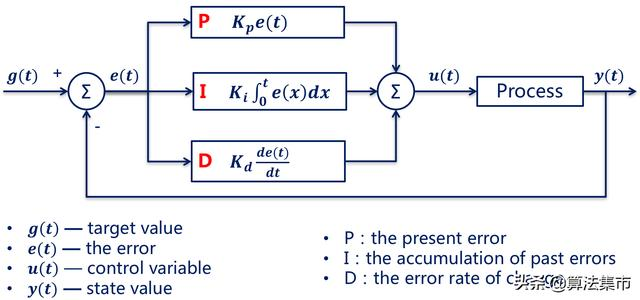
总之 PID 三个参数针对的都是误差值,
P现在的误差,I积分得到"过去的误差积累",D微分得到"误差的变化趋势"。
而我们需要做的,就是调出 P:I:D 合适的比例,使得系统达到动态平衡
PID 应用
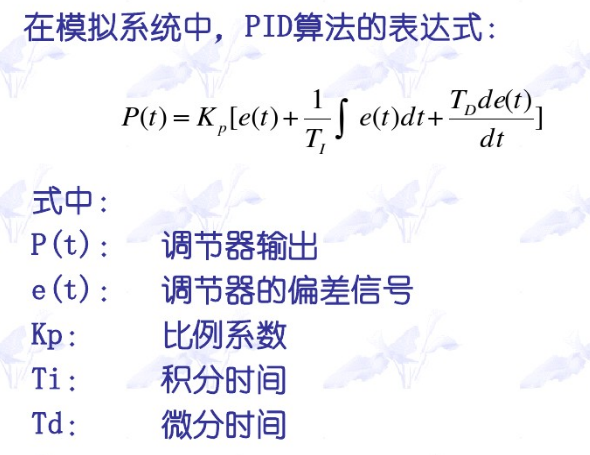
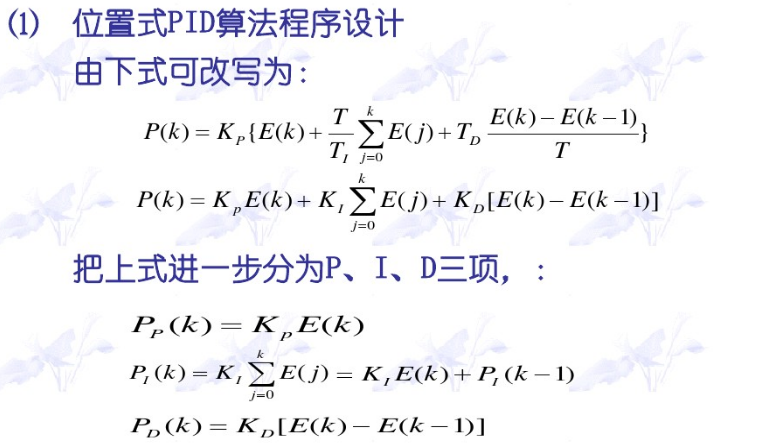
但以上公式并不能直接使用,因为计算机世界只有0和1组成的离散量,而积分微分是连续的模拟量
所以编程时需要使用数字量的公式。
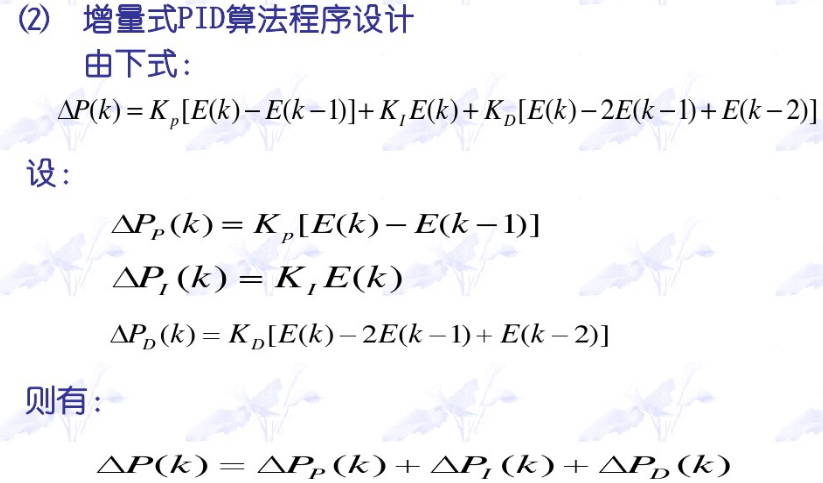
以下图源自:PID控制及整定算法
模拟型公式(连续的模拟量)
数字型公式(离散量)
PID 案例
两轮自平衡小车双闭环PID控制设计
单片机PID平衡方块
此外,PID 三参数其实是可以由程序自动调整获得最佳参数的,案例详见: 视频讲解TOKY东崎温控仪表PID自动AT自整定,达到最好的控温效果
案例已有,证明是有这种算法存在的,剩下的请找论文吧(皮~
总结
痛恨自己的浅尝辄止!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号