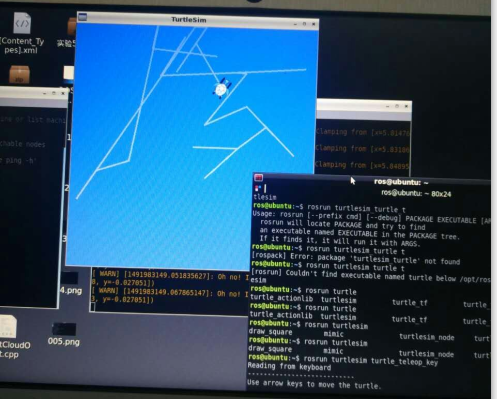
ROS基于Turtlebot机器人仿真实践
使用catkin_create_pkg创建一个新的catkin程序包。
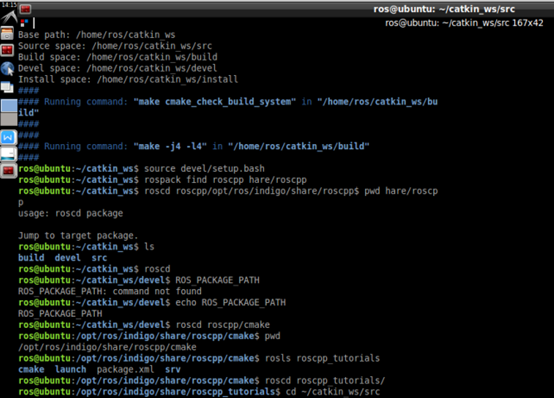
换到之前创建的catkin工作空间中的src目录下,
使用catkin_create_pkg命令来创建一个名为'myPKG'的新程序包,这个程序包依赖于std_msgs和roscpp
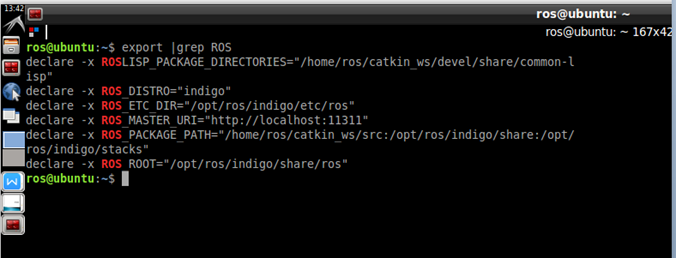
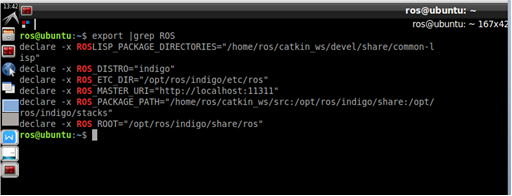
环境配置在Ubuntu中的操作指令:$ source /opt/ros/indigo/setup.bash。


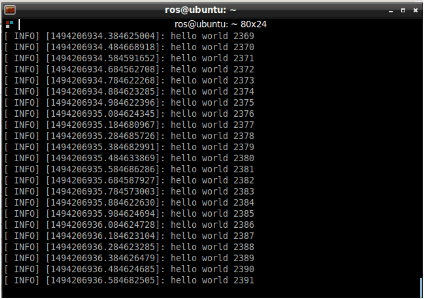
创建talker.cpp和listener.cpp,完成程序传递消息,消息为“Hello world”。
- 新建exp6程序包(依赖)
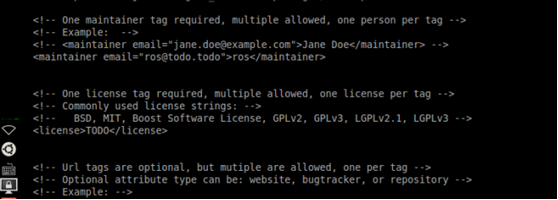
- 建立.msg文件
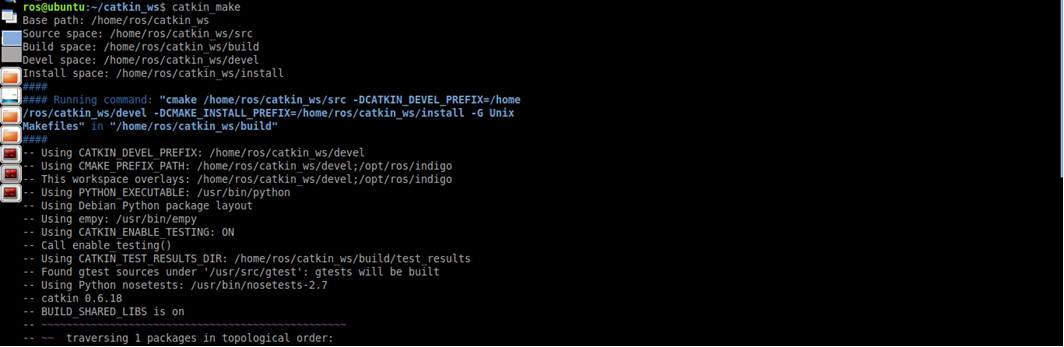
- 编译.msg文件(CMakeLists.txt)
- 建立talker.cpp文件,修改代码
- 建立listener.cpp文件,修改代码
- 编译(CMakeLists.txt)
- 执行


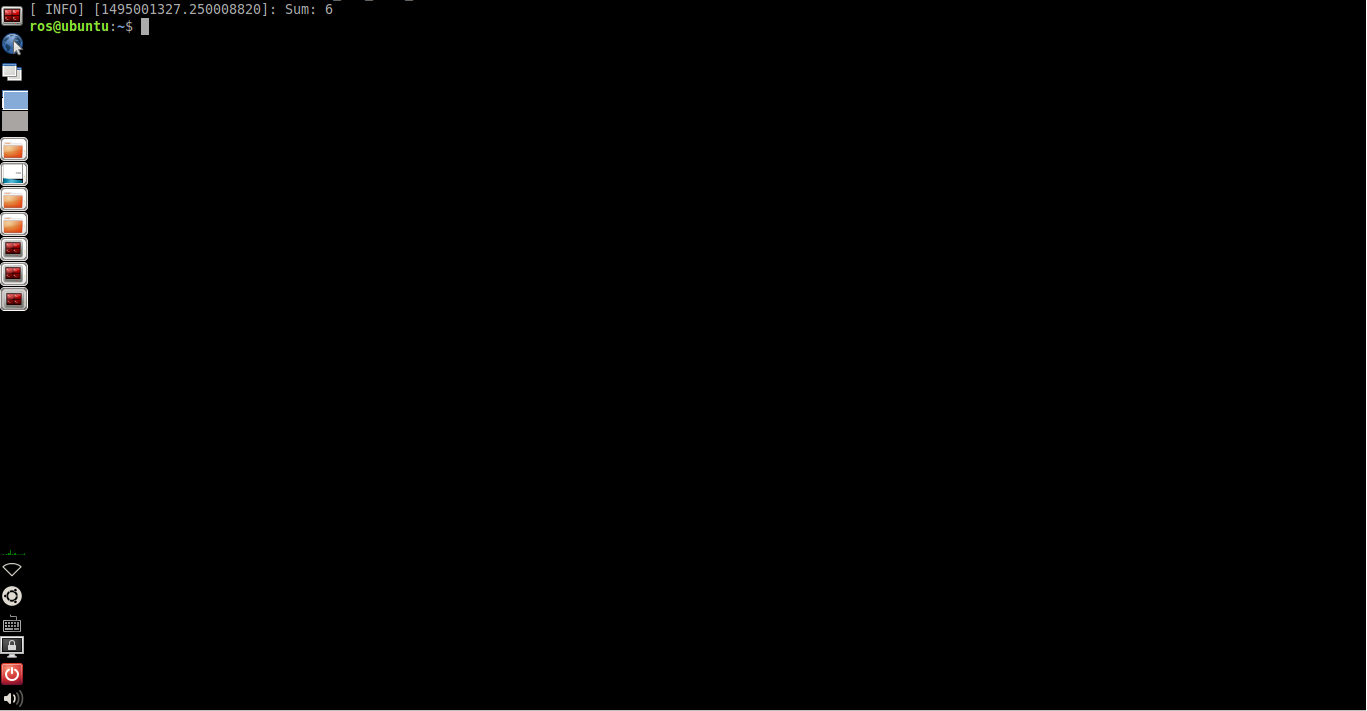
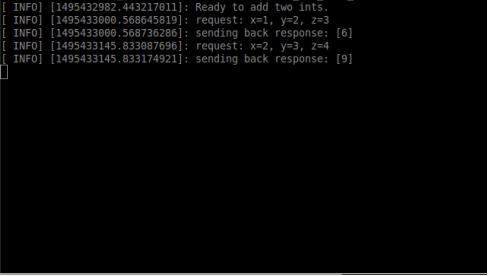
编写Service和Client程序,实现三个整数的相加





【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· 【自荐】一款简洁、开源的在线白板工具 Drawnix