查找
查找
查找:根据给定的某个值,在查找表中确定一个其关键字等于给定值的数据元素或记录
查找表是由同一类型的数据元素构成的集合,集合中的数据元素是一种松散的关系
- 静态查找表:仅作查询操作
- 动态查找表:作插入和删除操作
关键字:
- 主关键字:可唯一表示一个记录
- 次关键字:可以识别若干记录
查找算法的评级指标:关键字的平均比较次数,也称平均查找长度ASL=期望
线性表的查找
顺序查找(线性查找)
- 顺序表或线性表表示的静态查找表
- 表内元素之间无序
typedef struct {
int key;
}KeyType;
typedef struct {
KeyType *R; //表基质
int length; //表长
}SSTable;
int Search_Seq(SSTable ST,KeyType key){
for (int i = ST.length; i >=1 ; i--) {
if(ST.R[i].key==key.key) return i;
}
return 0;
}
每循环一次都要进行两次比较
改进:在0号位置加入要查找的key(监视哨),可以免去判断是否越界
当ST.length较大时,此改进进行一次查找的平均时间几乎减少一半
typedef struct {
int key;
}KeyType;
typedef struct {
KeyType *R; //表基质
int length; //表长
}SSTable;
int Search_Seq(SSTable ST,int key){
int i;
ST.R[0].key=key;
for (i = ST.length; ST.R[i].key!=key ; i--);
return i;
}
比较次数与key位置有关:
- 查找第i个元素,需要比较n+1-i次
- 查找失败需要比较n+1次
时间复杂度O(n) ASL=(n+1)/2(等概率查找)
空间复杂度O(1) :一个哨兵的辅助空间
当查找概率不等时:按查找概率高低存储
- 查找概率越高,比较次数越少
- 查找概率越低,比较次数越多
当查找概率无法确定时:按查找概率动态调整记录顺序
-
优:算法简单,逻辑次序无要求,不同存储结构均适用
-
缺:ASL太长,时间效率太低
折半查找(二分或对分查找)
有序表表示静态查找表
每次将待查记录所在区间缩小一半
每次用待查找的值与中间值(mid=(low+high)/2)进行比较
- 小于:往左继续(high移到mid-1处)
- 大于:往右继续(low移到mid+1处)
找到:mid==key;结束:high<low
int Search_Bin(SSTable ST,int key){
int low=1,mid;
int high=ST.length;
while (low<=high){
mid=(low+high)/2;
if(key==ST.R[mid].key) return mid;
else if(key>ST.R[mid].key) low=mid+1;
else if(key<ST.R[mid].key) high=mid-1;
}
return 0;
}
判定树:
成功: 比较次数=路径上的结点数=结点的层数<=树的深度(log2 n +1)
不成功:比较次数=路径内部结点数<=log2 n +1
ASL=log2(n+1) -1
时间复杂度O(lgn)
-
优:效率比顺序查找高
-
缺:只适用于有序表,且限于顺序存储结构 (对链式存储结构无效)
分块查找(索引查找)
将表分成几块,块间有序,块内可无序
时间效率位于折半查找与顺序查找之间
- 优:插入、删除比较容易,无需进行大量移动
- 缺:要增加一个索引表的存储空间,并对其排序
适用于:既要快速查找,又要动态变化
| 顺序查找 | 折半查找 | 分块查找 | |
|---|---|---|---|
| ASL | 最大 | 最小 | 中间 |
| 表结构 | 有序表、无序表 | 有序表 | 分块有序 |
| 存储结构 | 顺序表、线性链表 | 顺序表 | 顺序表、线性链表 |
树表的查找
改用动态查找表——特殊的树
表结构在查找过程中动态生成
给定值key,若表中存在则返回;不存在则插入关键字等于key的记录
二叉排序树
-
若左子树非空,左子树上所有结点值均小于根结点的值
-
若右子树非空,右子树上所有结点值均大于等于根结点的值
-
左右子树又是一颗二叉排序树
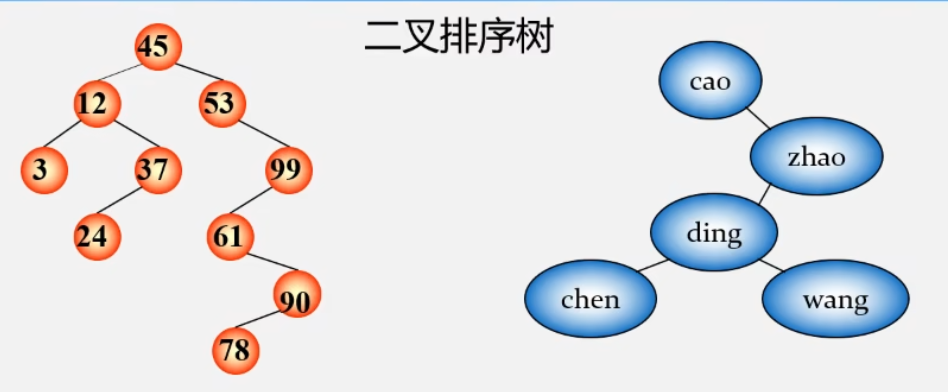
中序遍历二叉排序树是一个按关键字排列递增有序的序列
查找步骤:
- 查找的关键字等于根结点,成功
- 查找的关键字等于根结点
- 小于根结点,查其左子树
- 大于根结点,查其右子树
- 在左右子树上的操作类似
typedef struct {
int key;
}KeyType;
typedef struct BSTnode{
KeyType data;
struct bSTnode *lchild,*rchild;
}BSTNode,*BSTree;
BSTree SearchBST(BSTree T,int key){
if(!T||key==T->data.key) return T;
else if(key<T->data.key) return SearchBST((BSTree) T->lchild, key);
else if(key>T->data.key) return SearchBST((BSTree) T->rchild, key);
return 0;
}
平均查找长度ASL与树的深度有关
- 最好时:与折半查找的判定树相同,ASL=log2 (n+1) -1 ; 查找效率O(log2 n)
- 最坏时:单支树形态,与顺序查找相同,ASL=(n+1)/2; 查找效率O(n)
二叉排序树的插入
步骤:
- 若二叉排序树为空,则插入结点作为根结点插入到空树中
- 否则,继续在其左、右子树上查找
- 树中已有,不再插入
- 树中没有,查找直至某个叶子结点的左子树或右子树为空为止,则插入结点应为该叶子结点的左孩子或右孩子
- 一个无序序列可以通过二叉排序树变成一个有序序列,构造树的过程就是对无序序列进行排序的过程
- 插入的均为叶子结点,无需移动其他结点
- 关键字的输入顺序不同,建立的二叉排序树也不同
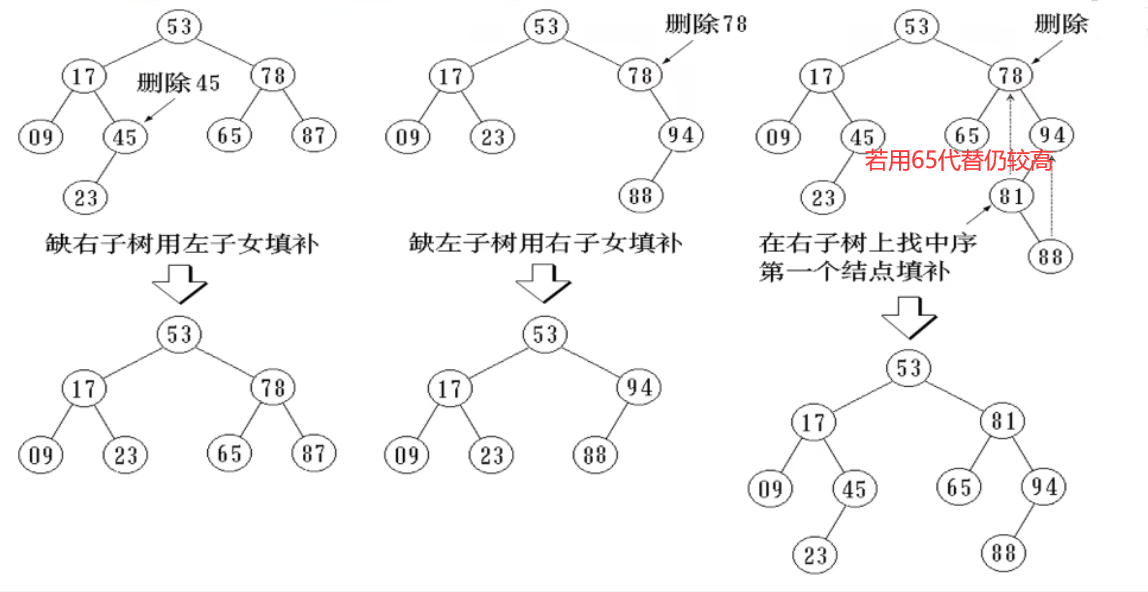
二叉排序树的删除: 高度不能增加
-
删除叶子结点:直接删除(其双亲指针域值改为空)
-
删除的结点只有左子树或右子树:用其左子树或右子树替换(其双亲结点的指针域指向删除结点的左子树或右子树)
-
删除的结点既有左子树又有右子树:
- 用左子树中最大结点代替,并删除左子树中最大结点
- 用右子树中最小结点代替,并删除右子树中最小结点
-
平衡二叉树/AVL树
-
是二叉排序树
-
左子树与右子树的高度差的绝对值≤1
平衡因子BF=左子树高度-右子树高度
-
左子树和右子树也是平衡二叉排序树
对于一棵有n个结点的AVL树,其高度保持在O(log2 n)数量级,ASL也保持在O(log2 n)量级;查找性能最好的二叉排序树
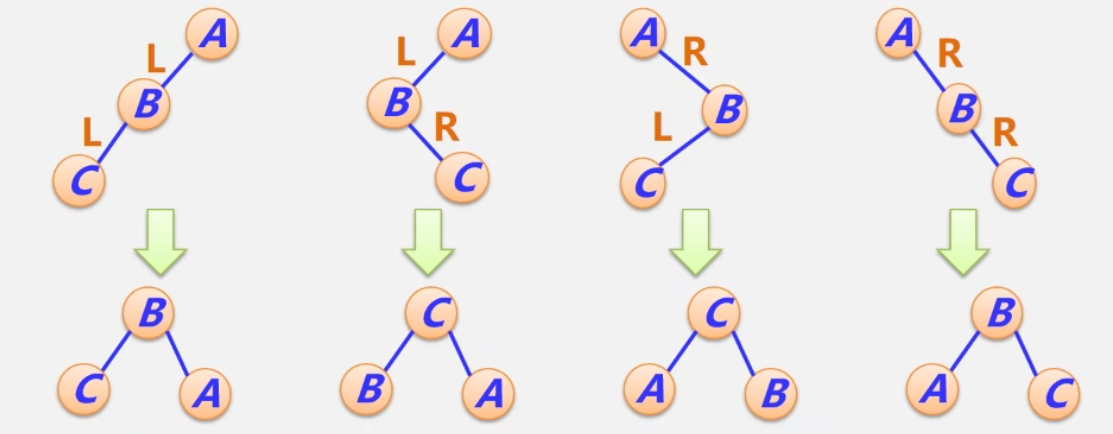
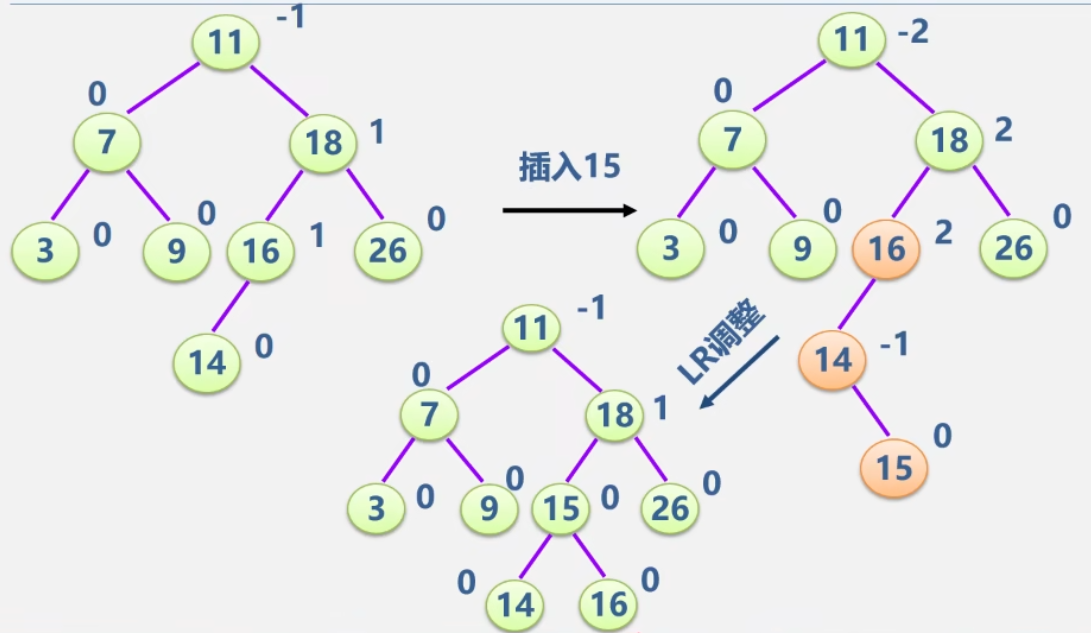
在平衡二叉排序树中插入新结点可能会导致失衡
当失衡结点不止一个时:找最小失衡子树的根结点
调整原则:降低高度;保持二叉排序树性质
-
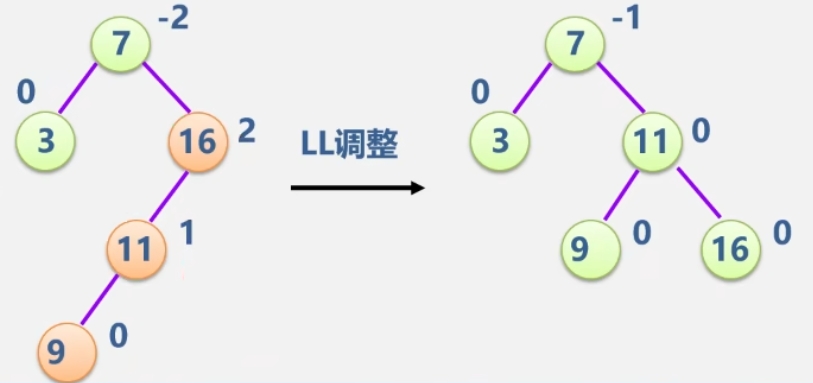
LL型
-
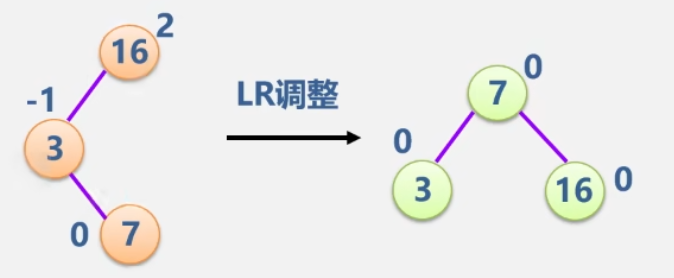
LR型
-
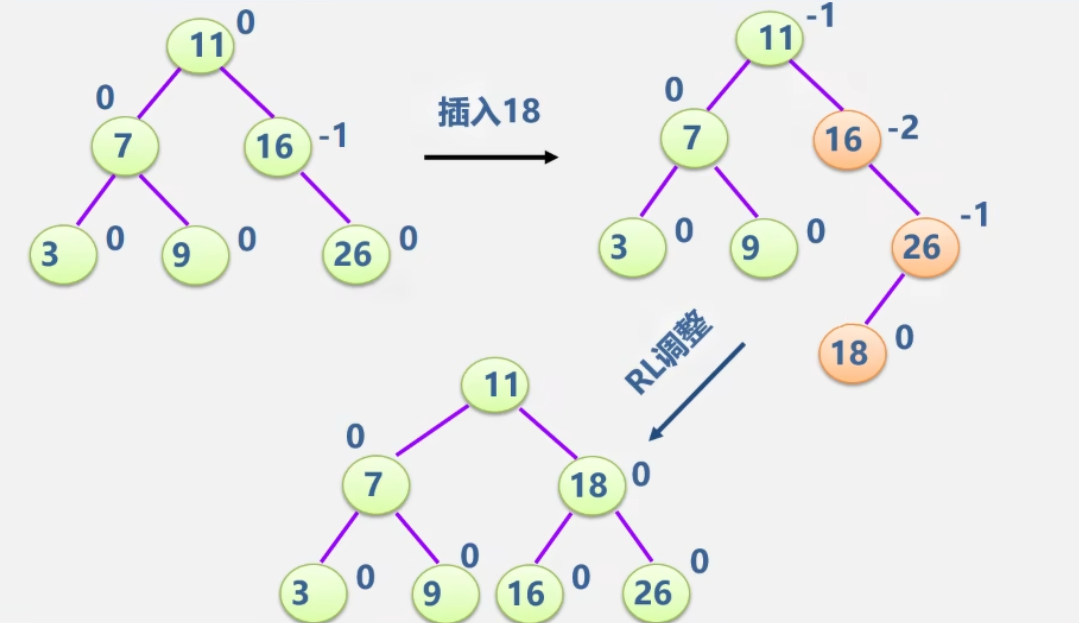
RL型
-
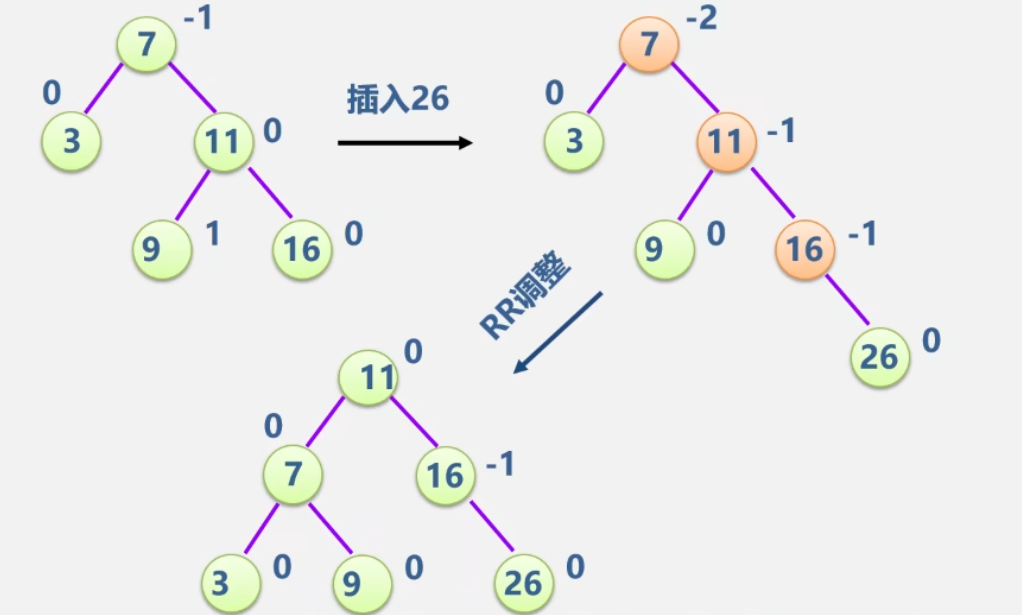
RR型
例:输入关键字序列(16,3,7,11,9,26,18,14,15)给出AVL树
哈希表的查找
记录的存储位置与关键字之间存在对应关系(hash散列函数)
LOC(i)=H(keyi)
- 优:查找效率高
- 缺:空间效率低 (空间换时间)
好的散列表需要好的散列函数+好的冲突方案
- 所选函数尽可能简单,以便提高转换速度
- 函数计算出的地址均匀分布,以减少空间浪费
考虑因素:
- 执行速度(计算散列函数所需时间)
- 关键字长度
- 散列表大小
- 关键字分布
- 查找频率
散列表的ASL取决于:
- 散列函数
- 处理冲突方法
- 散列表的装填因子α(α=表中填入的记录数/哈希表长)
散列表技术具有很好的平衡性能,优于一些传统技术
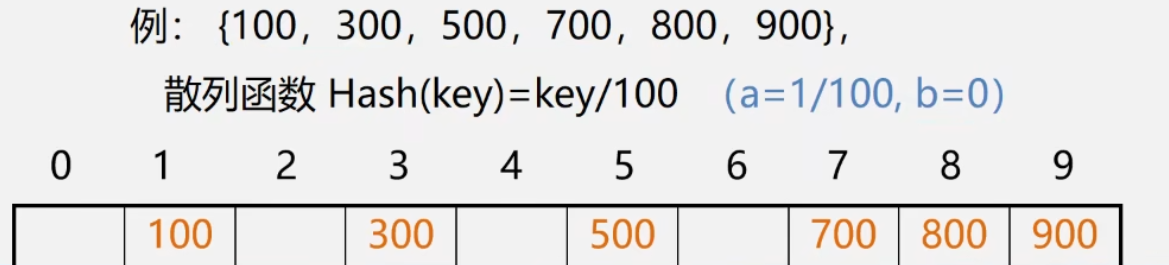
直接定址法
Hash(key)=a*key+b(a,b为常数)
- 优:以关键码key的某个线性函数值为散列地址,不会产生冲突
- 缺:要占用连续地址空间,空间效率低
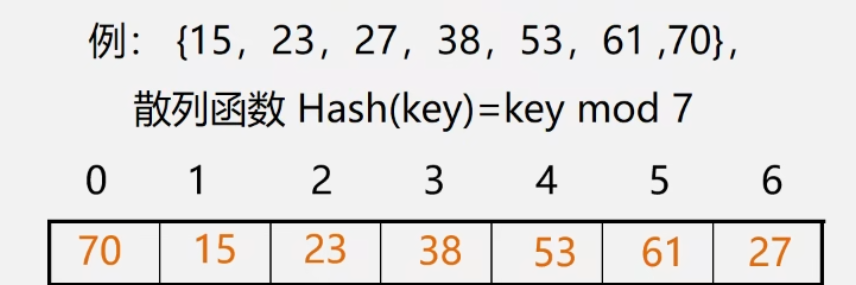
除留余数法
除留余数法作散列函数优于其他类型函数
Hash(key)=key mod p(p是个整数)
设表长为m,取p≤m且为质数
处理冲突的方法
冲突:不同的关键字映射到同一个散列地址
同义词:具有相同函数值的多个关键字
在散列查找方法中冲突不可能避免,只能尽可能减少
开放定址法(开地址法)
有冲突时就寻找下一个空的散列地址,只要散列表足够大,空的散列地址总能找到,并将数据元素存入
如:H=(Hash(key)+di)mod p
常用方法:
- 线性探测法:di为1,2,3,4...等线性序列
- 二次探测法:di为1^2,- 1^2, 2^2, - 2^2,...二次序列
- 伪随机探测法:di为伪随机数序列
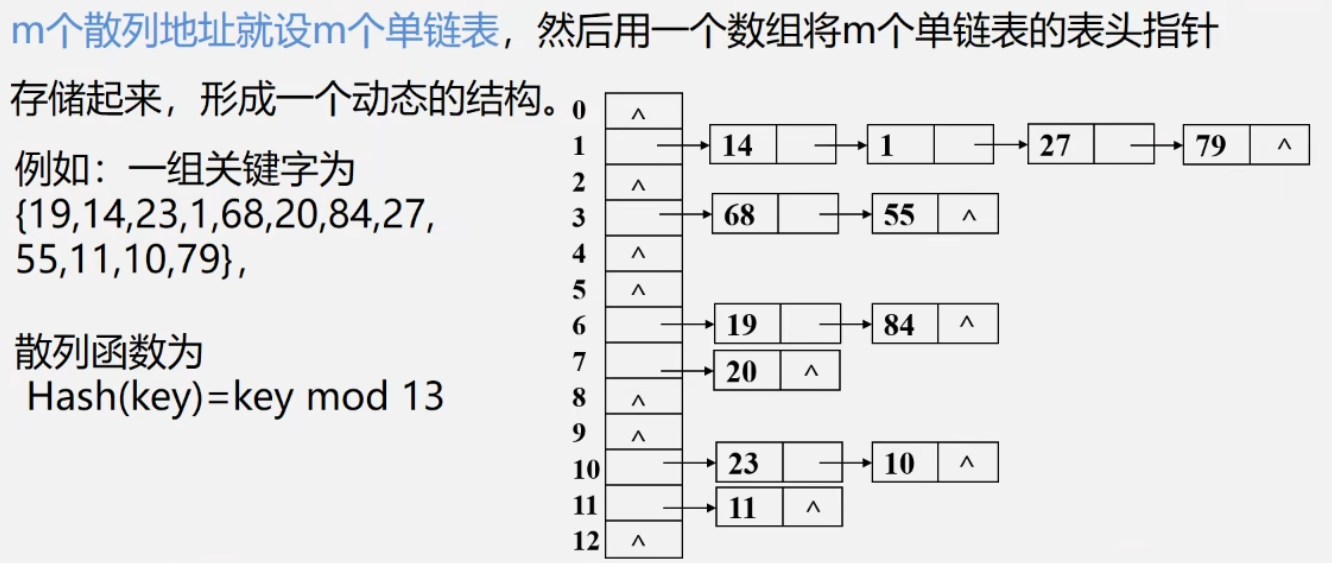
链地址法(拉链法)
相同散列地址的记录链成一单链表
非同义词不会冲突,无聚集现象;链表上的结点空间动态申请,更适合于表长不确定的情况
优于开放地址法