

二十六【uart】Uart驱动架构分析
一、前言
在linux中,serial也对应着终端你,通常被称为串口终端。在shell上,我们看到得/dev/ttyS*就是串口终端所对应的设备节点。
uart(Universal Asynchronous Receicer and transmitter)即为“通用异步收发器”。它是串口设备驱动的封装层。
二、Uart驱动架构概貌
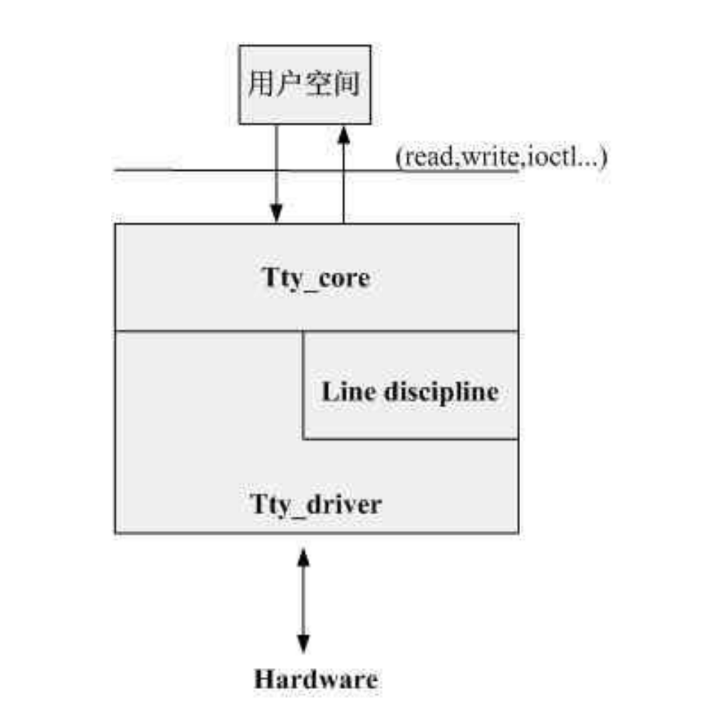
从上图可以看到,uart设备是继tty_drivers的又一层封装。实际上uart_driver就是对应tty_driver.在它的操作函数中,将操作转入uart_port.
- 在写操作的时候,先将数据放入一个叫做circ_buf的环形缓存区。然后uart_port从缓存区中取数据,将其写入到串口设备中。
- 当uart_port从serial设备接收到数据时,会将设备放入对应line discipline的缓存区中。这样,用户在编写串口驱动的时候,只先要注册一个uart_driver.它的主要作用是定义设备节点号。然后将对设备的各项操作封装在uart_port.驱动工程师没必要关心上层的流程,只需按硬件规范将uart_port中的接口函数完成就可以了。
三、uart驱动代码分析
1、uart驱动注册函数
drivers/tty/serial/serial_core.c
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 | /** * uart_register_driver - register a driver with the uart core layer * @drv: low level driver structure * * Register a uart driver with the core driver. We in turn register * with the tty layer, and initialise the core driver per-port state. * * We have a proc file in /proc/tty/driver which is named after the * normal driver. * * drv->port should be NULL, and the per-port structures should be * registered using uart_add_one_port after this call has succeeded. */int uart_register_driver(struct uart_driver *drv){ struct tty_driver *normal; int i, retval = -ENOMEM; BUG_ON(drv->state); /* * Maybe we should be using a slab cache for this, especially if * we have a large number of ports to handle. */ drv->state = kcalloc(drv->nr, sizeof(struct uart_state), GFP_KERNEL); if (!drv->state) goto out; normal = alloc_tty_driver(drv->nr); if (!normal) goto out_kfree; drv->tty_driver = normal; normal->driver_name = drv->driver_name; normal->name = drv->dev_name; normal->major = drv->major; normal->minor_start = drv->minor; normal->type = TTY_DRIVER_TYPE_SERIAL; normal->subtype = SERIAL_TYPE_NORMAL; normal->init_termios = tty_std_termios; normal->init_termios.c_cflag = B4000000 | CS8 | CREAD | HUPCL | CLOCAL; normal->init_termios.c_ispeed = normal->init_termios.c_ospeed = 4000000; //默认的波特率 normal->flags = TTY_DRIVER_REAL_RAW | TTY_DRIVER_DYNAMIC_DEV; normal->driver_state = drv; tty_set_operations(normal, &uart_ops); /* * Initialise the UART state(s). */ for (i = 0; i < drv->nr; i++) { struct uart_state *state = drv->state + i; struct tty_port *port = &state->port; tty_port_init(port); //端口初始化 port->ops = &uart_port_ops; } //驱动注册 retval = tty_register_driver(normal); if (retval >= 0) return retval; for (i = 0; i < drv->nr; i++) tty_port_destroy(&drv->state[i].port); put_tty_driver(normal);out_kfree: kfree(drv->state);out: return retval;} |
2、添加端口函数uart_add_one_port()
在uart_driver增加一个port
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 | /** * uart_add_one_port - attach a driver-defined port structure * @drv: pointer to the uart low level driver structure for this port * @uport: uart port structure to use for this port. * * This allows the driver to register its own uart_port structure * with the core driver. The main purpose is to allow the low * level uart drivers to expand uart_port, rather than having yet * more levels of structures. */int uart_add_one_port(struct uart_driver *drv, struct uart_port *uport){ struct uart_state *state; struct tty_port *port; int ret = 0; struct device *tty_dev; int num_groups; BUG_ON(in_interrupt()); if (uport->line >= drv->nr) return -EINVAL; state = drv->state + uport->line; port = &state->port; mutex_lock(&port_mutex); mutex_lock(&port->mutex); if (state->uart_port) { ret = -EINVAL; goto out; } /* Link the port to the driver state table and vice versa */ atomic_set(&state->refcount, 1); init_waitqueue_head(&state->remove_wait); state->uart_port = uport; uport->state = state; state->pm_state = UART_PM_STATE_UNDEFINED; uport->cons = drv->cons; uport->minor = drv->tty_driver->minor_start + uport->line; uport->name = kasprintf(GFP_KERNEL, "%s%d", drv->dev_name, drv->tty_driver->name_base + uport->line); if (!uport->name) { ret = -ENOMEM; goto out; } /* * If this port is a console, then the spinlock is already * initialised. */ if (!(uart_console(uport) && (uport->cons->flags & CON_ENABLED))) { spin_lock_init(&uport->lock); lockdep_set_class(&uport->lock, &port_lock_key); } if (uport->cons && uport->dev) of_console_check(uport->dev->of_node, uport->cons->name, uport->line); tty_port_link_device(port, drv->tty_driver, uport->line); uart_configure_port(drv, state, uport); port->console = uart_console(uport); num_groups = 2; if (uport->attr_group) num_groups++; uport->tty_groups = kcalloc(num_groups, sizeof(*uport->tty_groups), GFP_KERNEL); if (!uport->tty_groups) { ret = -ENOMEM; goto out; } uport->tty_groups[0] = &tty_dev_attr_group; if (uport->attr_group) uport->tty_groups[1] = uport->attr_group; /* * Register the port whether it's detected or not. This allows * setserial to be used to alter this port's parameters. */ tty_dev = tty_port_register_device_attr_serdev(port, drv->tty_driver, uport->line, uport->dev, port, uport->tty_groups); if (!IS_ERR(tty_dev)) { device_set_wakeup_capable(tty_dev, 1); } else { dev_err(uport->dev, "Cannot register tty device on line %d\n", uport->line); } /* * Ensure UPF_DEAD is not set. */ uport->flags &= ~UPF_DEAD; out: mutex_unlock(&port->mutex); mutex_unlock(&port_mutex); return ret;} |
首先这个函数不能在中断环境中使用.Uart_port-> line就是对uart设备文件序号.它对应的也就是uart_driver-> state数组中的uart_port->line项.
它主要初始化对应uart_driver-> state项.接着调用uart_configure_port()进行port的自动配置.然后注册 tty_device.如果用户空间运行了udev或者已经配置好了hotplug.就会在/ dev下自动生成设备文件了.
3、串口的文件操作集合
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 | static const struct tty_operations uart_ops = { .install = uart_install, .open = uart_open, .close = uart_close, .write = uart_write, .put_char = uart_put_char, //单字符写入 .flush_chars = uart_flush_chars, .write_room = uart_write_room, //检测缓冲区的剩余空间 .chars_in_buffer= uart_chars_in_buffer, //检测包含数据缓冲区的数量 .flush_buffer = uart_flush_buffer, //刷新缓冲区并丢弃其中的数据 .ioctl = uart_ioctl, .throttle = uart_throttle, .unthrottle = uart_unthrottle, .send_xchar = uart_send_xchar, .set_termios = uart_set_termios, .set_ldisc = uart_set_ldisc, //设置线路规程的函数 .stop = uart_stop, .start = uart_start, .hangup = uart_hangup, .break_ctl = uart_break_ctl, .wait_until_sent= uart_wait_until_sent, //用来向硬件发送数据#ifdef CONFIG_PROC_FS .proc_show = uart_proc_show,#endif .tiocmget = uart_tiocmget, //获取特定tty设备当前的线路设置 .tiocmset = uart_tiocmset, //设置特定tty设备当前的线路 .set_serial = uart_set_info_user, .get_serial = uart_get_info_user, .get_icount = uart_get_icount,#ifdef CONFIG_CONSOLE_POLL .poll_init = uart_poll_init, .poll_get_char = uart_poll_get_char, .poll_put_char = uart_poll_put_char,#endif}; |


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具