

十九、IIC驱动框架介绍及驱动代码解析
一、IIC驱动框架简介
1、IIC物理总线
- SCL:时钟线,数据收发同步。
- SDL:数据线,具体数据
支持一主多从,各设备地址独立,标准模式传输速率为100kbit/s,快速模式为400kbit/s
2、常见IIC设备
- EEPROM
- 触摸芯片
- 温湿度传感器
- mpu6050
3、框架图
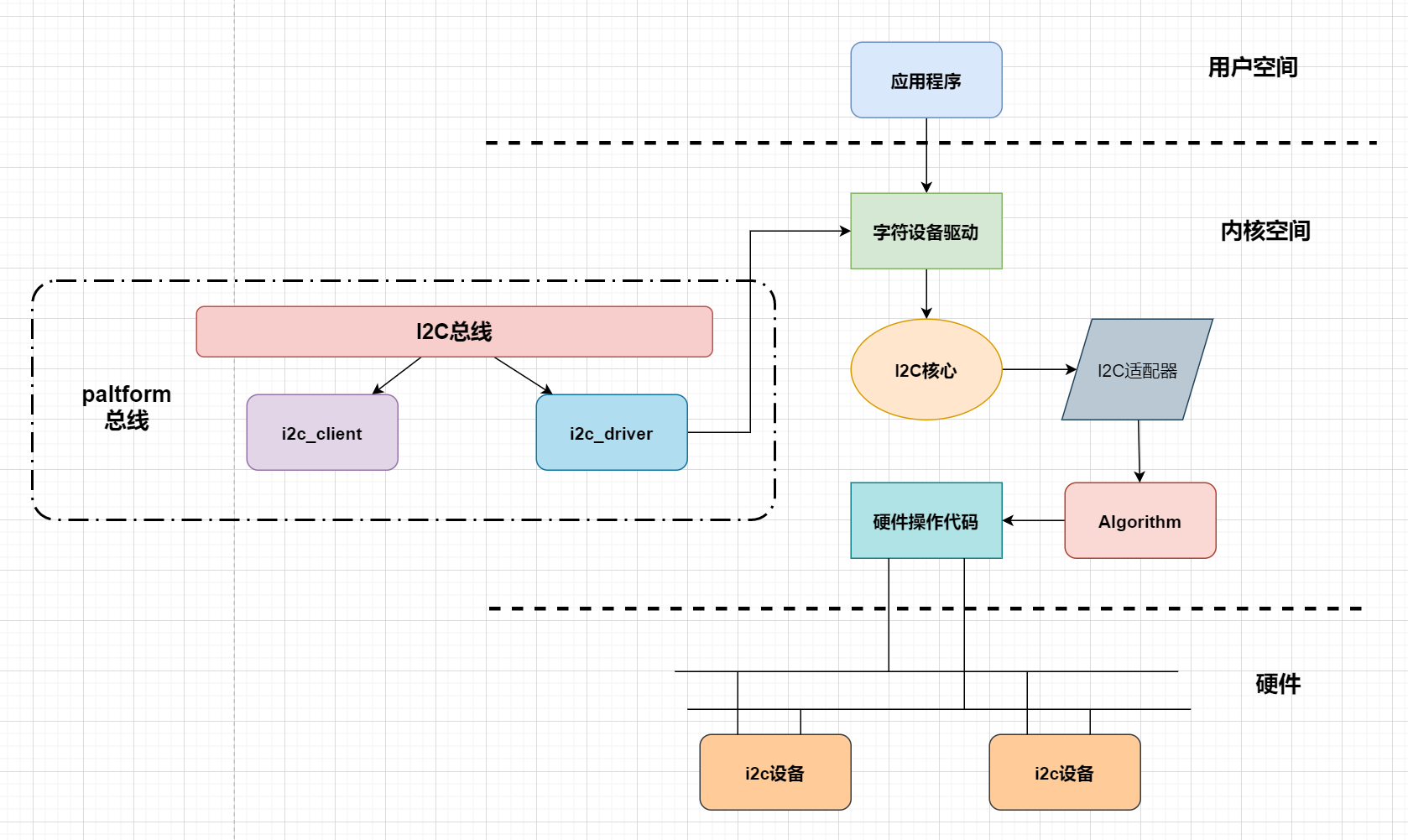
- I2C核心
提供I2C总线驱动和设备驱动的注册方法、注销方法、I2C通信硬件无关代码。
- I2C总线驱动
主要包含I2C硬件体系结构中适配器(IIC控制器)的控制,用于I2C读写时序。
主要数据结构:I2C_adapter、 I2C_algorithm.
- I2C设备驱动
通过I2C适配器与CPU交换数据。
主要数据结构:i2c_driver和i2c_client.
- I2C适配器
i2c adapter是软件上抽象出来的i2c总线控制器接口,物理上一条i2c总线可以挂接多个硬件设备(slave),一个CPU可以挂接多条i2c总线(想象一下PCI总线),i2c总线控制器就是CPU访问I2C总线的硬件接口,也就是你说的那几个寄存器
简单来说,你的开发板上有几个I2C接口,就有几个adapter , 也就是有几条I2C bus , I2C CLIENT 对应的就是你的外围I2C 设备,有几个就有几个CLIENT , 把这些设备插入开发板, 对应其中的一条BUS, 那么相应的就对应了其中的一个ADAPTER , 接下来的就是 CLIENT 与 ADAPTER 勾搭成对了, 后面就是做该做的事了
二、I2C驱动文件分析
1、i2c-dev.c
(1)初始化
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 | static int __init i2c_dev_init(void){ int res; printk(KERN_INFO "i2c /dev entries driver\n"); //1、注册字符设备 res = register_chrdev_region(MKDEV(I2C_MAJOR, 0), I2C_MINORS, "i2c"); if (res) goto out; //2、创建类 i2c_dev_class = class_create(THIS_MODULE, "i2c-dev"); if (IS_ERR(i2c_dev_class)) { res = PTR_ERR(i2c_dev_class); goto out_unreg_chrdev; } i2c_dev_class->dev_groups = i2c_groups; //3、追踪哪个i2c适配器被添加或者移除 /* Keep track of adapters which will be added or removed later */ res = bus_register_notifier(&i2c_bus_type, &i2cdev_notifier); if (res) goto out_unreg_class; //4、立即绑定已经存在的适配器 /* Bind to already existing adapters right away */ i2c_for_each_dev(NULL, i2cdev_attach_adapter); return 0;out_unreg_class: class_destroy(i2c_dev_class);out_unreg_chrdev: unregister_chrdev_region(MKDEV(I2C_MAJOR, 0), I2C_MINORS);out: printk(KERN_ERR "%s: Driver Initialisation failed\n", __FILE__); return res;} |
(2)文件操作集合
i2c设备驱动的文件操作集合中有两个ioctl:
1 2 3 4 5 6 7 8 9 10 | static const struct file_operations i2cdev_fops = { .owner = THIS_MODULE, .llseek = no_llseek, .read = i2cdev_read, //读 .write = i2cdev_write, //写 .unlocked_ioctl = i2cdev_ioctl, .compat_ioctl = compat_i2cdev_ioctl, .open = i2cdev_open, .release = i2cdev_release,}; |
两者的区别在于:
- 64位的用户程序运行在64位的kernel上,调用的是compat_ioctl,
- 32位的APP运行在32位的kernel上,调用的也是unlocked_ioctl。
(3)读操作
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 | static ssize_t i2cdev_read(struct file *file, char __user *buf, size_t count, loff_t *offset){ char *tmp; int ret; struct i2c_client *client = file->private_data; //最多读8192个字节 if (count > 8192) count = 8192; tmp = kzalloc(count, GFP_KERNEL); if (tmp == NULL) return -ENOMEM; pr_debug("i2c-dev: i2c-%d reading %zu bytes.\n", iminor(file_inode(file)), count); //接收到i2c传过来的数据 ret = i2c_master_recv(client, tmp, count); if (ret >= 0) //将数据拷贝到用户空间 if (copy_to_user(buf, tmp, ret)) ret = -EFAULT; kfree(tmp); return ret;} |
(4)写操作
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | static ssize_t i2cdev_write(struct file *file, const char __user *buf, size_t count, loff_t *offset){ int ret; char *tmp; struct i2c_client *client = file->private_data; if (count > 8192) count = 8192; //分配一块内存空间,将用户空间的数据拷贝进去 tmp = memdup_user(buf, count); if (IS_ERR(tmp)) return PTR_ERR(tmp); pr_debug("i2c-dev: i2c-%d writing %zu bytes.\n", iminor(file_inode(file)), count); //i2c发送 ret = i2c_master_send(client, tmp, count); kfree(tmp); return ret;} |
1 | memdup_user函数 |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 | /** * memdup_user - duplicate memory region from user space * * @src: source address in user space * @len: number of bytes to copy * * Return: an ERR_PTR() on failure. Result is physically * contiguous, to be freed by kfree(). */void *memdup_user(const void __user *src, size_t len){ void *p; //分配内核态的空间 p = kmalloc_track_caller(len, GFP_USER | __GFP_NOWARN); if (!p) return ERR_PTR(-ENOMEM); //从用户空间拷贝数据 if (copy_from_user(p, src, len)) { kfree(p); return ERR_PTR(-EFAULT); } return p;} |
(5)i2cdev_ioctl
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 | static long i2cdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg){ struct i2c_client *client = file->private_data; unsigned long funcs; dev_dbg(&client->adapter->dev, "ioctl, cmd=0x%02x, arg=0x%02lx\n", cmd, arg); switch (cmd) { //设置从机地址 //I2C_SLAVE和I2C_SLAVE_FORCE的区别在于I2C_SLACE会检查设备地址,如果地址已经使用,就不能使用重复的地址,否则会返回-EBUSY,而I2C_SLACE_FORCE会跳过检查 case I2C_SLAVE: case I2C_SLAVE_FORCE: if ((arg > 0x3ff) || (((client->flags & I2C_M_TEN) == 0) && arg > 0x7f)) return -EINVAL; if (cmd == I2C_SLAVE && i2cdev_check_addr(client->adapter, arg)) return -EBUSY; /* REVISIT: address could become busy later */ client->addr = arg; return 0; //设置10bit地址模式 //如果select不等于0选择10bit地址模式,如果等于0选择7bit模式,默认7bit。只有适配器支持I2C_FUNC_10BIT_ADDR,这个请求才是有效的 case I2C_TENBIT: if (arg) client->flags |= I2C_M_TEN; else client->flags &= ~I2C_M_TEN; return 0; //设置传输后增加PEC标志(用于数据校验) //这个命令只对SMBus传输有效。这个请求只在适配器支持I2C_FUNC_SMBUS_PEC时有效;如果不支持这个命令也是安全的,它不做任何工作 case I2C_PEC: /* * Setting the PEC flag here won't affect kernel drivers, * which will be using the i2c_client node registered with * the driver model core. Likewise, when that client has * the PEC flag already set, the i2c-dev driver won't see * (or use) this setting. */ if (arg) client->flags |= I2C_CLIENT_PEC; else client->flags &= ~I2C_CLIENT_PEC; return 0; //获取适配器支持的功能:SMbus或者普通的I2C case I2C_FUNCS: funcs = i2c_get_functionality(client->adapter); return put_user(funcs, (unsigned long __user *)arg); //i2c读写,和i2c_read、i2c_write的区别在于这两个函数一次只能处理一条消息,而i2c_RDWR一次可以处理多条消息 case I2C_RDWR: { struct i2c_rdwr_ioctl_data rdwr_arg; struct i2c_msg *rdwr_pa; if (copy_from_user(&rdwr_arg, (struct i2c_rdwr_ioctl_data __user *)arg, sizeof(rdwr_arg))) return -EFAULT; if (!rdwr_arg.msgs || rdwr_arg.nmsgs == 0) return -EINVAL; /* * Put an arbitrary limit on the number of messages that can * be sent at once */ //最多处理42条message if (rdwr_arg.nmsgs > I2C_RDWR_IOCTL_MAX_MSGS) return -EINVAL; rdwr_pa = memdup_user(rdwr_arg.msgs, rdwr_arg.nmsgs * sizeof(struct i2c_msg)); if (IS_ERR(rdwr_pa)) return PTR_ERR(rdwr_pa); return i2cdev_ioctl_rdwr(client, rdwr_arg.nmsgs, rdwr_pa); } //smbus协议 case I2C_SMBUS: { struct i2c_smbus_ioctl_data data_arg; if (copy_from_user(&data_arg, (struct i2c_smbus_ioctl_data __user *) arg, sizeof(struct i2c_smbus_ioctl_data))) return -EFAULT; return i2cdev_ioctl_smbus(client, data_arg.read_write, data_arg.command, data_arg.size, data_arg.data); } //设置重试次数 //这句话设置适配器收不到ACK时重试的次数为m。默认的重试次数为1。 case I2C_RETRIES: if (arg > INT_MAX) return -EINVAL; client->adapter->retries = arg; break; //超时时间,时间单位为jiffes case I2C_TIMEOUT: if (arg > INT_MAX) return -EINVAL; /* For historical reasons, user-space sets the timeout * value in units of 10 ms. */ client->adapter->timeout = msecs_to_jiffies(arg * 10); break; default: /* NOTE: returning a fault code here could cause trouble * in buggy userspace code. Some old kernel bugs returned * zero in this case, and userspace code might accidentally * have depended on that bug. */ return -ENOTTY; } return 0;} |
1 | I2C_RDWR应用实例:i2c驱动之调用ioctl函数进行读写at24c08 |
i2c数据传输主要通过i2c_transfer函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 | /** * i2c_transfer - execute a single or combined I2C message * @adap: Handle to I2C bus * @msgs: One or more messages to execute before STOP is issued to * terminate the operation; each message begins with a START. * @num: Number of messages to be executed. * * Returns negative errno, else the number of messages executed. * * Note that there is no requirement that each message be sent to * the same slave address, although that is the most common model. */int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num){ int ret; if (!adap->algo->master_xfer) { dev_dbg(&adap->dev, "I2C level transfers not supported\n"); return -EOPNOTSUPP; } /* REVISIT the fault reporting model here is weak: * * - When we get an error after receiving N bytes from a slave, * there is no way to report "N". * * - When we get a NAK after transmitting N bytes to a slave, * there is no way to report "N" ... or to let the master * continue executing the rest of this combined message, if * that's the appropriate response. * * - When for example "num" is two and we successfully complete * the first message but get an error part way through the * second, it's unclear whether that should be reported as * one (discarding status on the second message) or errno * (discarding status on the first one). */ ret = __i2c_lock_bus_helper(adap); if (ret) return ret; ret = __i2c_transfer(adap, msgs, num); i2c_unlock_bus(adap, I2C_LOCK_SEGMENT); return ret;} |
(6)退出函数
1 2 3 4 5 6 7 | static void __exit i2c_dev_exit(void){ bus_unregister_notifier(&i2c_bus_type, &i2cdev_notifier); i2c_for_each_dev(NULL, i2cdev_detach_adapter); class_destroy(i2c_dev_class); unregister_chrdev_region(MKDEV(I2C_MAJOR, 0), I2C_MINORS);} |
2、i2c_algorithm
两种i2c算法,一种是普通的I2c数据通讯协议,一种是SMbus协议,是两种不同的通信方法
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 | /** * struct i2c_algorithm - represent I2C transfer method * @master_xfer: Issue a set of i2c transactions to the given I2C adapter * defined by the msgs array, with num messages available to transfer via * the adapter specified by adap. * @master_xfer_atomic: same as @master_xfer. Yet, only using atomic context * so e.g. PMICs can be accessed very late before shutdown. Optional. * @smbus_xfer: Issue smbus transactions to the given I2C adapter. If this * is not present, then the bus layer will try and convert the SMBus calls * into I2C transfers instead. * @smbus_xfer_atomic: same as @smbus_xfer. Yet, only using atomic context * so e.g. PMICs can be accessed very late before shutdown. Optional. * @functionality: Return the flags that this algorithm/adapter pair supports * from the I2C_FUNC_* flags. * @reg_slave: Register given client to I2C slave mode of this adapter * @unreg_slave: Unregister given client from I2C slave mode of this adapter * * The following structs are for those who like to implement new bus drivers: * i2c_algorithm is the interface to a class of hardware solutions which can * be addressed using the same bus algorithms - i.e. bit-banging or the PCF8584 * to name two of the most common. * * The return codes from the @master_xfer{_atomic} fields should indicate the * type of error code that occurred during the transfer, as documented in the * Kernel Documentation file Documentation/i2c/fault-codes.rst. */struct i2c_algorithm { /* * If an adapter algorithm can't do I2C-level access, set master_xfer * to NULL. If an adapter algorithm can do SMBus access, set * smbus_xfer. If set to NULL, the SMBus protocol is simulated * using common I2C messages. * * master_xfer should return the number of messages successfully * processed, or a negative value on error */ int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs, int num); int (*master_xfer_atomic)(struct i2c_adapter *adap, struct i2c_msg *msgs, int num); int (*smbus_xfer)(struct i2c_adapter *adap, u16 addr, unsigned short flags, char read_write, u8 command, int size, union i2c_smbus_data *data); int (*smbus_xfer_atomic)(struct i2c_adapter *adap, u16 addr, unsigned short flags, char read_write, u8 command, int size, union i2c_smbus_data *data); /* To determine what the adapter supports */ u32 (*functionality)(struct i2c_adapter *adap);#if IS_ENABLED(CONFIG_I2C_SLAVE) int (*reg_slave)(struct i2c_client *client); int (*unreg_slave)(struct i2c_client *client);#endif}; |
3、i2c总线驱动分析(i2c-core-base.c)
(1)i2c总线定义
1 2 3 4 5 6 7 | struct bus_type i2c_bus_type = { .name = "i2c", .match = i2c_device_match, .probe = i2c_device_probe, .remove = i2c_device_remove, .shutdown = i2c_device_shutdown,}; |
(2)总线注册
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 | static int __init i2c_init(void){ int retval; retval = of_alias_get_highest_id("i2c"); down_write(&__i2c_board_lock); if (retval >= __i2c_first_dynamic_bus_num) __i2c_first_dynamic_bus_num = retval + 1; up_write(&__i2c_board_lock); retval = bus_register(&i2c_bus_type); if (retval) return retval; is_registered = true;#ifdef CONFIG_I2C_COMPAT i2c_adapter_compat_class = class_compat_register("i2c-adapter"); if (!i2c_adapter_compat_class) { retval = -ENOMEM; goto bus_err; }#endif retval = i2c_add_driver(&dummy_driver); if (retval) goto class_err; if (IS_ENABLED(CONFIG_OF_DYNAMIC)) WARN_ON(of_reconfig_notifier_register(&i2c_of_notifier)); if (IS_ENABLED(CONFIG_ACPI)) WARN_ON(acpi_reconfig_notifier_register(&i2c_acpi_notifier)); return 0;class_err:#ifdef CONFIG_I2C_COMPAT class_compat_unregister(i2c_adapter_compat_class);bus_err:#endif is_registered = false; bus_unregister(&i2c_bus_type); return retval;} |
(3)i2c设备和驱动匹配规则
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | static int i2c_device_match(struct device *dev, struct device_driver *drv){ struct i2c_client *client = i2c_verify_client(dev); struct i2c_driver *driver; /* Attempt an OF style match */ if (i2c_of_match_device(drv->of_match_table, client)) return 1; /* Then ACPI style match */ if (acpi_driver_match_device(dev, drv)) return 1; driver = to_i2c_driver(drv); /* Finally an I2C match */ if (i2c_match_id(driver->id_table, client)) return 1; return 0;} |
- i2c_of_match_device:设备树匹配方式
比较I2C设备节点的compatible属性和of_device_id中的compatible属性
- acpi_driver_match_device: ACPI匹配方式
- i2c_match_id: i2c总线传统匹配方式
比较i2c设备名字和i2c驱动的id_table->name字段是否相等
三、SMbus介绍
1、介绍
- 系统管理总线(SMBus)是一个两线接口。通过它,各设备之间以及设备与系统的其他部分之间可以互相通信。
- 它基于I2C操作原理。SMBus为系统和电源管理相关的任务提供一条控制总线。一个系统利用SMBus可以和多个设备互传信息,而不需使用独立的控制线路。
- 系统管理总线(SMBus)标准涉及三类设备。从设备-接收或响应命令的设备。主设备-用来发布命令,产生时钟和终止发送的设备。主机,是一种专用的主设备,它提供与系统CPU的主接口。主机必须具有主-从机功能,并且必须支持SMBus通报协议。
- 在一个系统里只允许有一个主机。
2、SMBus和I2C之间的相似点
- 2条线的总线协议(1个时钟,1个数据) + 可选的SMBus提醒线
- 主-从通信,主设备提供时钟
- 多主机功能
- SMBus数据格式类似于I2C的7位地址格式
3、SMBus和I2C之间的不同点
| SMbus | i2c |
| 传输速度 10khz~100khz | 最小传输速度 10kHz 无最小传输速度 |
| 最小传输速度 35ms时钟低超时 | 无时钟超时 |
| 固定的逻辑电平 | 逻辑电平由VDD决定 |
| 不同的地址类型(保留、动态等) | 7位、10位和广播呼叫从地址类型 |
| 不同的总线协议(快速命令、处理呼叫等) | 无总线协议 |
4、SMBus应用用途
利用系统管理总线,设备可提供制造商信息,告诉系统它的型号/部件号,保存暂停事件的状态,报告不同类型的错误,接收控制参数,和返回它的状态。SMBus为系统和电源管理相关的任务提供控制总线。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
2019-01-09 C语言可重入函数和不可重入函数