STM32(二十八)CAN总线
一、简介
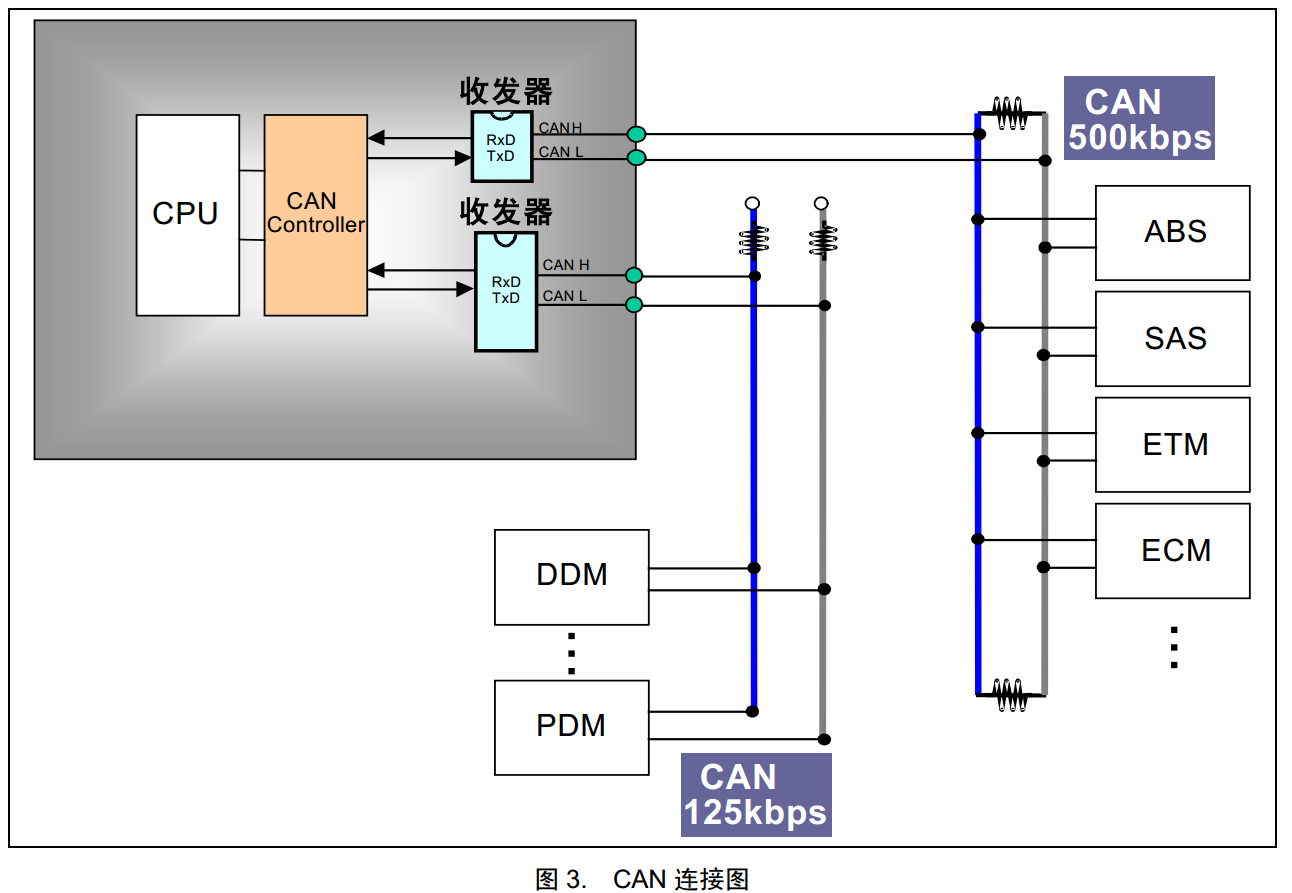
CAN是一种串行通信协议,CAN控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐形电平。发送方通过使总线电平发生变化,将消息发送给接收方。与I2C、SPI等具有时钟信号的同步通讯方式不同,CAN通讯并不是以时钟信号来进行同步的, 它是一种异步通讯,只具有CAN_High 和CAN_Low 两条信号线,共同构成一组差分信号线,以差分信号的形式进行通讯。can协议广泛应用与工业自动化、船舶、医疗设备、工业设备等方面。下图为总线拓扑图:
(1)差分信号
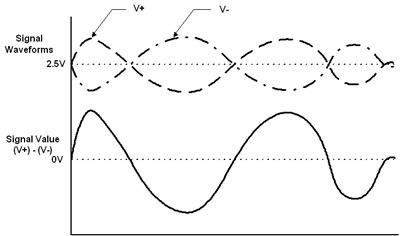
差分信号又称差模信号,与传统使用单根信号线电压表示逻辑的方式有区别,使用差分信号传输时,需要两根信号线, 这两个信号线的振幅相等,相位相反,通过两根信号线的电压差值来表示逻辑0 和逻辑1。见 下图,它使用了V+与V-信号的差值表达出了图下方的信号。
相对于单信号线传输的方式,使用差分信号传输具有如下优点:
-
抗干扰能力强,当外界存在噪声干扰时,几乎会同时耦合到两条信号线上,而接收端只关心两个信号的差值,所以外界的共模噪声可以被完全抵消。
-
能有效抑制它对外部的电磁干扰,同样的道理,由于两根信号的极性相反,他们对外辐射的电磁场可以相互抵消,耦合的越紧密,泄放到外界的电磁能量越少。
-
时序定位精确,由于差分信号的开关变化是位于两个信号的交点,而不像普通单端信号依靠高低两个阈值电压判断, 因而受工艺,温度的影响小,能降低时序上的误差,同时也更适合于低幅度信号的电路。
由于差分信号线具有这些优点,所以在USB协议、485协议、以太网协议及CAN协议的物理层中,都使用了差分信号传输。
(2)CAN协议中的差分信号
CAN协议中对它使用的CAN_High及CAN_Low表示的差分信号做了规定,。以高速CAN协议为例,当表示逻辑1 时(隐性电平) ,CAN_High和CAN_Low线上的电压均为2.5v, 即它们的电压差VH-V:sub:L=0V;而表示逻辑0 时(显性电平) ,CAN_High的电平为3.5V, CAN_Low线的电平为1.5V, 即它们的电压差为VH-V:sub:L=2V。例如,当CAN收发器 从CAN_Tx线接收到来自CAN控制器的低电平 信号时(逻辑0), 它会使CAN_High输出3.5V,同时CAN_Low输出1.5V,从而输出显性电平表示逻辑0 。
二、can协议特点
(1)多主控制
在总线空闲时,所有的单元都可开始发送消息(多主控制)。最先访问总线的单元可获得发送权(CSMA/CA方式*)。多个单元同时开始发送时,发送高优先级ID消息的单元可获得发送权。
(2)消息的发送
在CAN协议中,所有的消息都以固定的格式发送。总线空闲时,所有与总线相连的单元都可以开始发送新消息。两个以上的单元同时开始发送消息时,根据标识符(Identifier 以下称为ID)决定优先级。ID并不是表示发送的目的地址,而是表示访问总线的消息的优先级。两个以上的单元同时开始发送消息时,对各消息ID的每个位进行逐个仲裁比较。仲裁获胜(被判定为优先级最高〉的单元可继续发送消息,仲裁失利的单元则立刻停止发送而进行接收工作。
(3)系统的柔软性
与总线相连的单元没有类似于“地址”的信息。因此在总线上增加单元时,连接在总线上的其它单元的软硬件及应用层都不需要改变。
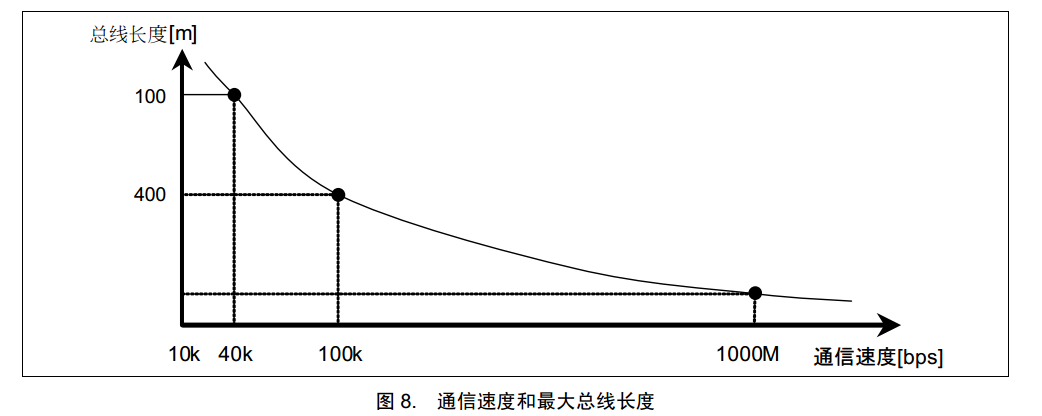
(4)通信速度
根据整个网络的规模,可设定适合的通信速度。在同一网络中,所有单元必须设定成统一的通信速度。即使有一个单元的通信速度与其它的不一样,此单元也会输出错误信号,妨碍整个网络的通信。不同网络间则可以有不同的通信速度。
(5)远程数据请求
可通过发送“遥控帧”请求其他单元发送数据。
(6)错误检测功能·错误通知功能·错误恢复功能
所有的单元都可以检测错误(错误检测功能)。检测出错误的单元会立即同时通知其他所有单元(错误通知功能)。正在发送消息的单元一旦检测出错误,会强制结束当前的发送。强制结束发送的单元会不断反复地重新发送此消息直到成功发送为止(错误恢复功能)。
(7)故障封闭
CAN可以判断出错误的类型是总线上暂时的数据错误(如外部噪声等)还是持续的数据错误(如单元内部故障、驱动器故障、断线等)。由此功能,当总线上发生持续数据错误时,可将引起此故障的单元从总线上隔离出去。
(8)连接
CAN总线是可同时连接多个单元的总线。可连接的单元总数理论上是没有限制的。但实际上可连接的单元数受总线上的时间延迟及电气负载的限制。降低通信速度,可连接的单元数增加;提高通信速度,则可连接的单元数减少。
三、CAN协议的基本概念
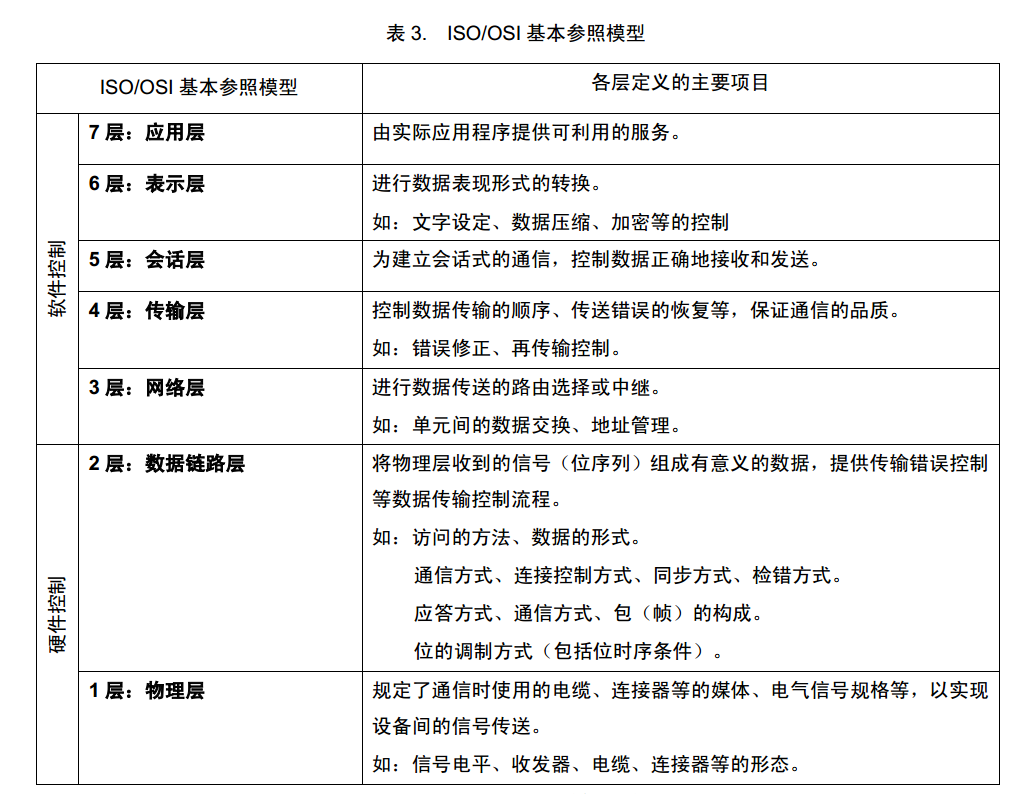
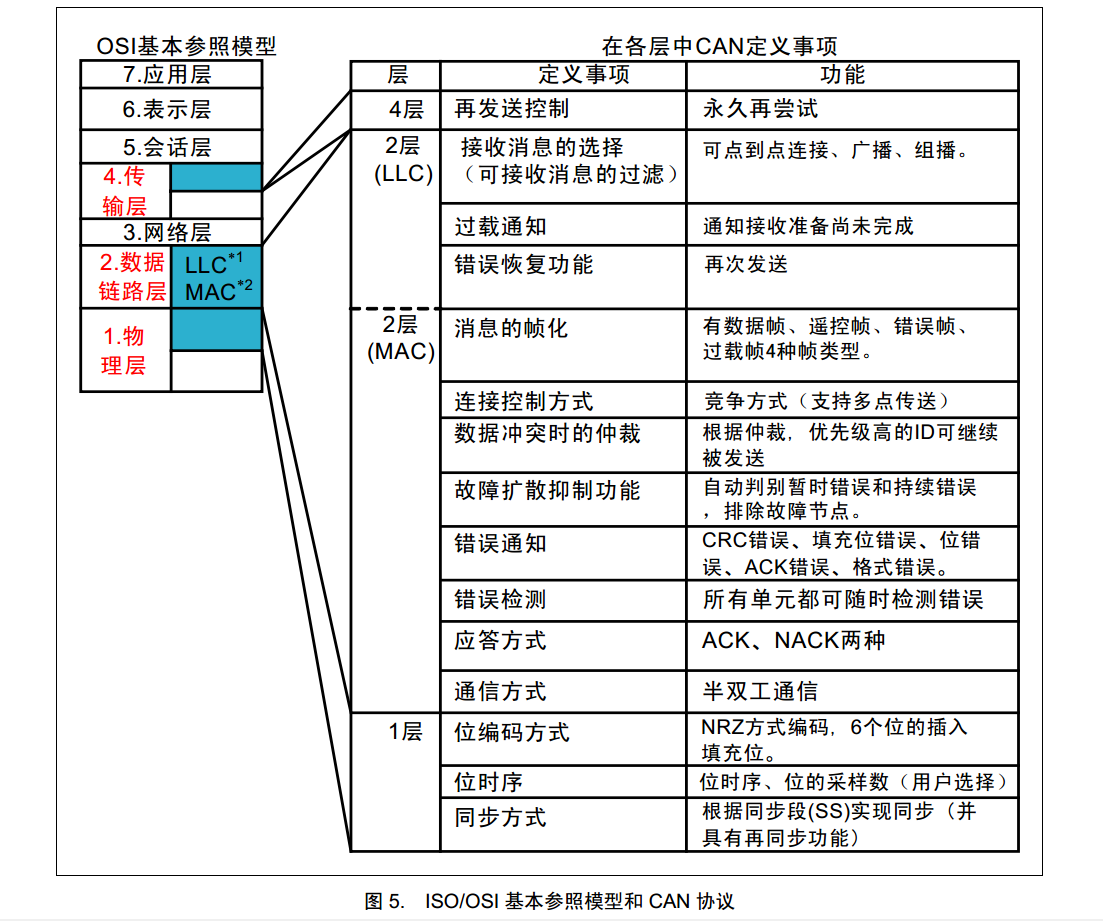
CAN协议如表3所示涵盖了ISO规定的OSI*基本参照模型中的传输层、数据链路层及物理层。
四、ISO11898和ISO11519-2的不同点
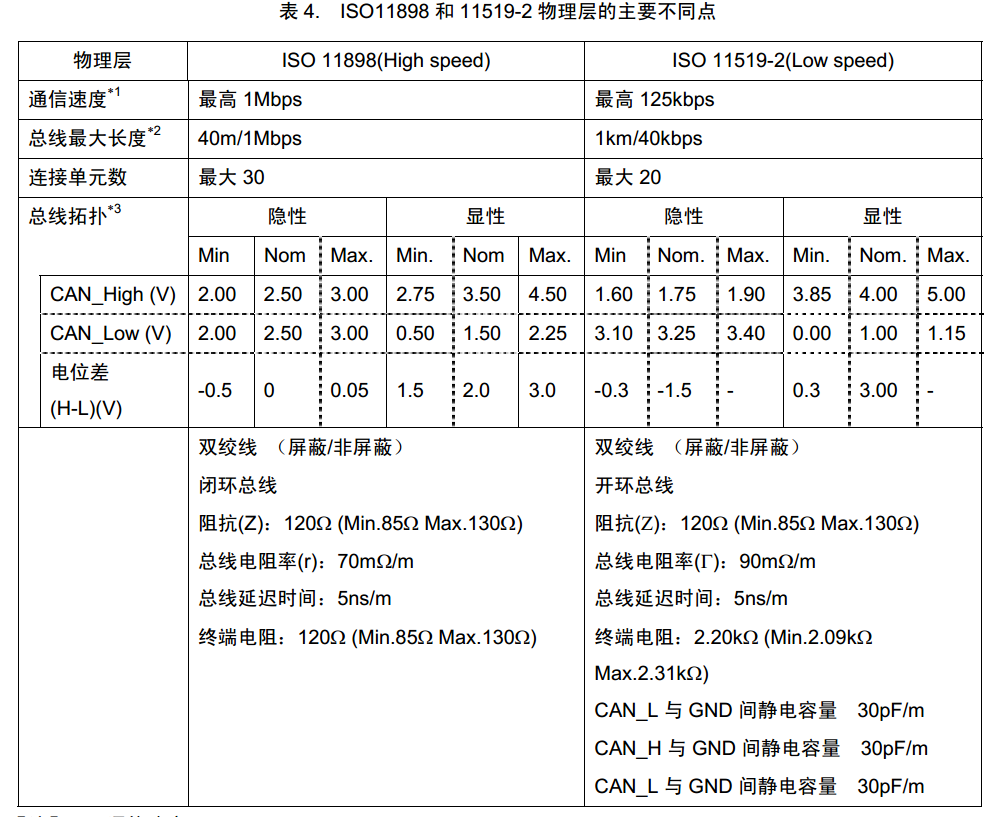
CAN收发器根据两根总线(CAN_High和CAN_Low)的电位差来判断总线电平。总线电平分为显性电平和隐性电平两种。总线必须处于两种电平之一。总线上执行逻辑上的线“与"时,显性电平为“0”,隐性电平为“1”。物理层的特征如图9所示。
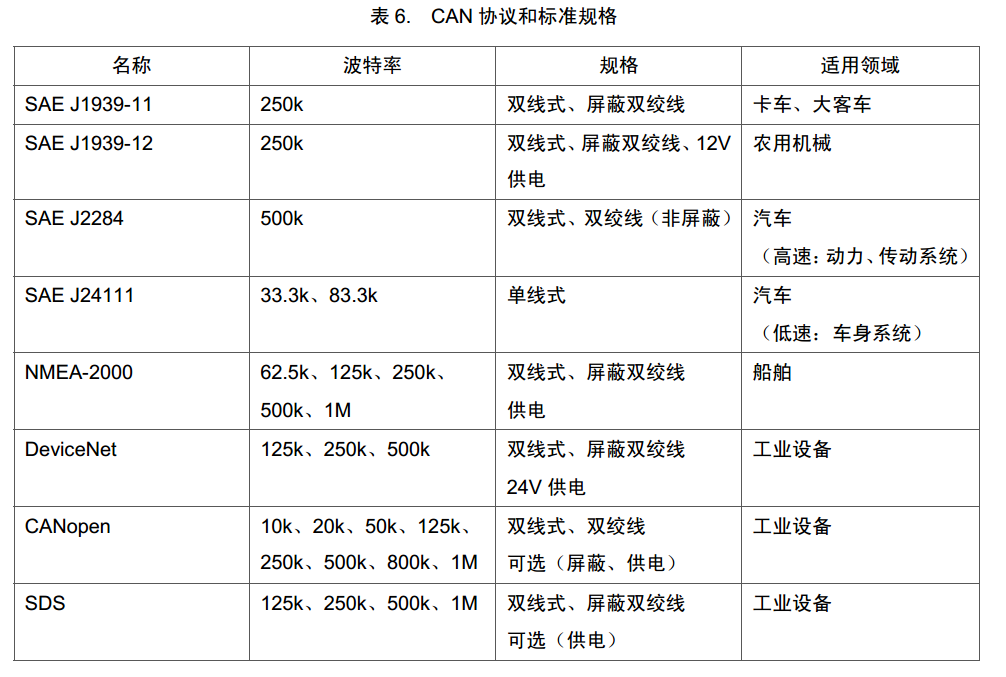
五、can和标准规格
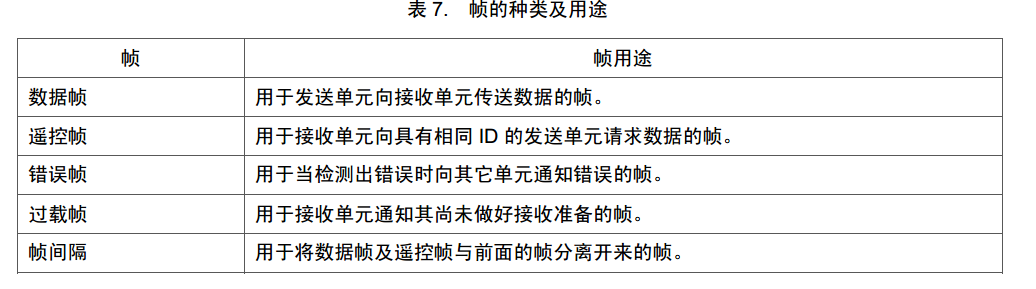
六、帧的种类
数据通信是通过以下 5 种类型的帧进行的。
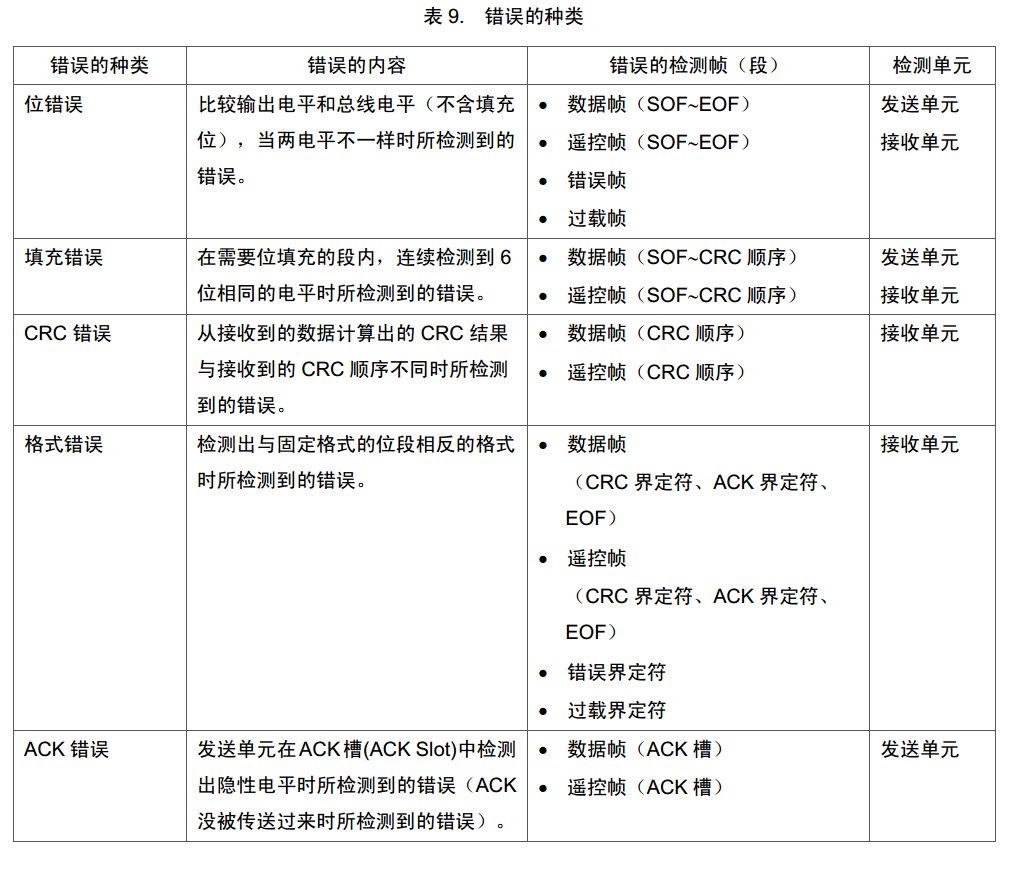
七、错误的种类
八、四种工作模式
各个工作模式介绍如下:
-
正常模式
正常模式下就是一个正常的CAN节点,可以向总线发送数据和接收数据。
-
静默模式
静默模式下,它自己的输出端的逻辑0数据会直接传输到它自己的输入端,逻辑1可以被发送到总线,所以它不能向总线发送显性位(逻辑0),只能发送隐性位(逻辑1)。输入端可以从总线接收内容。由于它只可发送的隐性位不会强制影响总线的状态,所以把它称为静默模式。这种模式一般用于监测,它可以用于分析总线上的流量,但又不会因为发送显性位而影响总线。
-
回环模式
回环模式下,它自己的输出端的所有内容都直接传输到自己的输入端,输出端的内容同时也会被传输到总线上,即也可使用总线监测它的发送内容。输入端只接收自己发送端的内容,不接收来自总线上的内容。使用回环模式可以进行自检。
-
回环静默模式
回环静默模式是以上两种模式的结合,自己的输出端的所有内容都直接传输到自己的输入端,并且不会向总线发送显性位影响总线,不能通过总线监测它的发送内容。输入端只接收自己发送端的内容,不接收来自总线上的内容。这种方式可以在“热自检”时使用,即自我检查的时候,不会干扰总线。
以上说的各个模式,是不需要修改硬件接线的,例如,当输出直接连输入时,它是在STM32芯片内部连接的,传输路径不经过STM32的CAN_Tx/Rx引脚,更不经过外部连接的CAN收发器,只有输出数据到总线或从总线接收的情况下才会经过CAN_Tx/Rx引脚和收发器。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号