

卷积神经网络
一.图像(Image)
1.图像是人类在视觉方面对外界信息的表示,图:光的分布;像:图在人脑中的描述或认识。图像可以简单理解为人眼中画面,可以表示二维或三维信息
2.图像分为模拟图像(像素点无限稠密,连续函数)和数字图像(像素点有限且为离散数值),明显,现在计算机能够处理的只能是数字图像,
3.数字图像:以像素为基本元素,一个图像由有限个像素点组成(矩形点阵),二维图像的大小(height,weight)是指在高(宽)方向有多少个像素点,一个(28,28)的图像在宽、高方向分别有28列像素点,则该图像一共有28*28=784个像素
4.像素pixel:每个像素点在计算机中表示是在离散空间中的一个值,一般为整数,一个像素一般是二维图像中的一个小方格,包含位置信息和光亮度信息
5.数字图像分类
(1)二值图像:一个像素1bit存储,只有黑白两种颜色,用1表示白色,0表示黑色
(2)灰度图像:一个像素8bit(1字节)存储,用黑色来显示物体,以黑色为基准色,亮度从深到浅,0表示黑色,255表示白色,0-255表示不同亮度
(3)RGB图像:一个像素3字节存储,由3个灰度图分别结合洋红(Magenta)、黄(Yellow )与青(Cyan )三个通道组成,原因是这三种颜色任意比例混合可以得到任何一种颜色,也就是说:三通道的图像只是表示亮度的强弱,而加上rgb三原色可以显现为彩色图像,此时亮度相当于颜色比例
二.卷积(Convolution)
1.数学上的卷积:是一种两个函数间的数学运算
(1)卷表现为相同的重复,积表现为(范围内的)积分,若是离散的,也就是加权叠加。
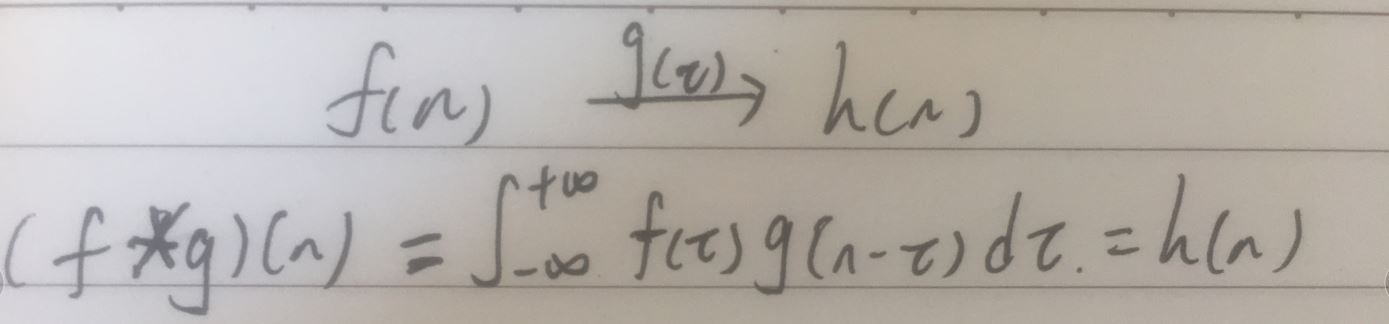
【1】解释:对于一个稳定的系统f,给予一些冲击g,这些冲击会对这个系统造成改变,这个系统在某个时刻n的状态由稳定的状态f(n)变为受到之前一旦时间所有的状态f以及对应每次冲击g的双重影响h(n),把这段时间可以看做一个个独立的近似无穷小的时刻(负无穷~正无穷),这和积分的概念一样,相当于当前时刻n的状态是由之前每个时刻的状态和对应冲击共同影响的(f*g)(n)。若是离散时间段,则就是相乘叠加,这大概就是‘积’的概念---每步的输出受到之前每步输入和对应冲击的共同影响
【2】又由于每个时刻设定的受到的影响范围都是一样的,即每个时刻受到之前相同时间段内状态和冲击的影响,即表示每个时刻其实是一样的,平行的,类似于平面上的平行线(斜率一样)(类似卷布),这大概就是‘卷’的概念----每一步都是重复进行的,每一次运算的规则都一样
【3】关于数学上要做g的翻转,可能是因为g的作用是对于第n时刻来说的,也就是只需要受到第n时刻之前的冲击影响,不需要考虑对第n时刻以后的影响,所以做了约束g(n-t)

2.卷积网络中的卷积:用于处理图像,提取特征
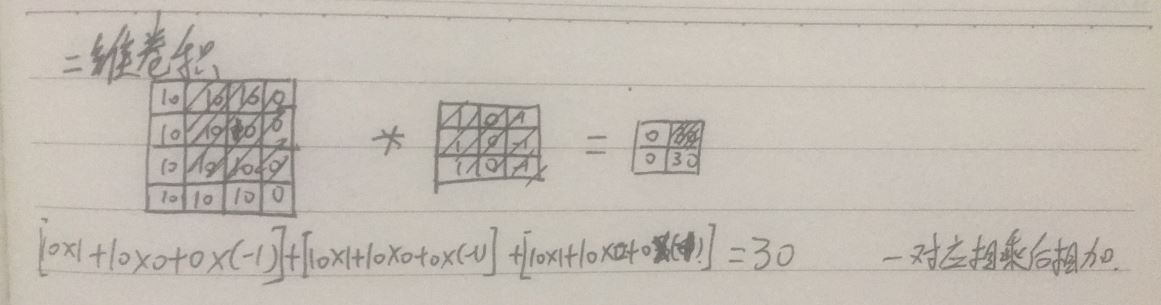
(1)二维图像的卷积运算:原图像上和卷积核一样大小的局部像素点阵与卷积核进行卷积运算(矩阵点乘、内积、数量积、元素相乘求和),得到一个像素点的值。因此可以把一个卷积核看做一个窗口,在原图像上滑动进行卷积运算,可以生成一张新的图像
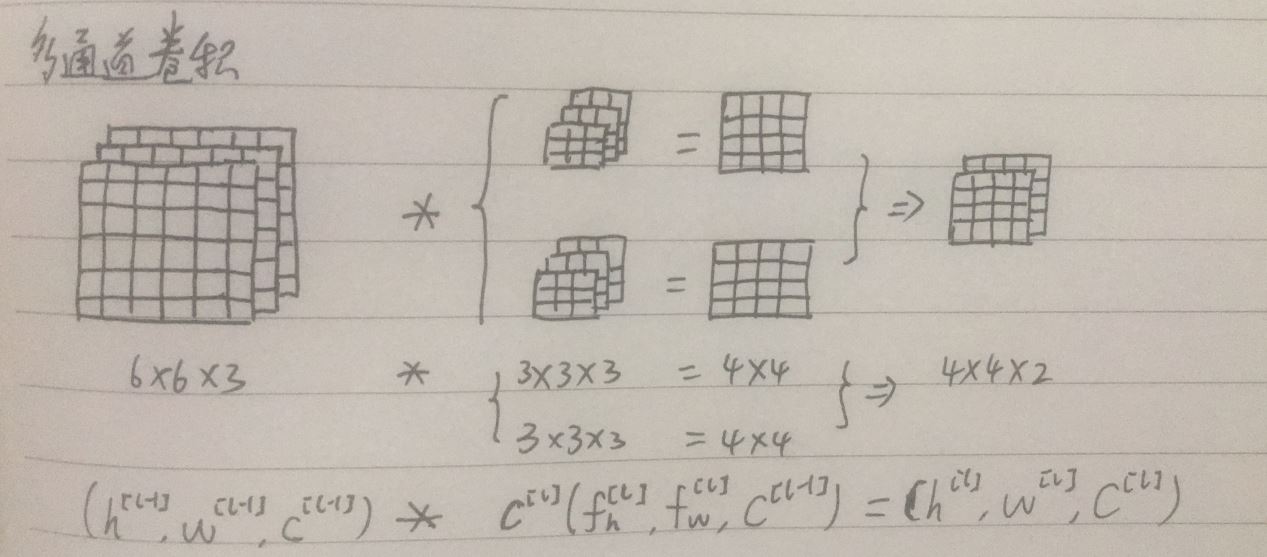
(2)多通道图像的卷积:对原图像使用多个卷积核进行卷积,每个卷积核的参数不一样,每个卷积核不一样,每个卷积核的通道数和原图像的通道数一样,每个卷积核和图像作卷积运算得到一个通道上的二维图像,卷积核数目就是输出图像的通道数数目
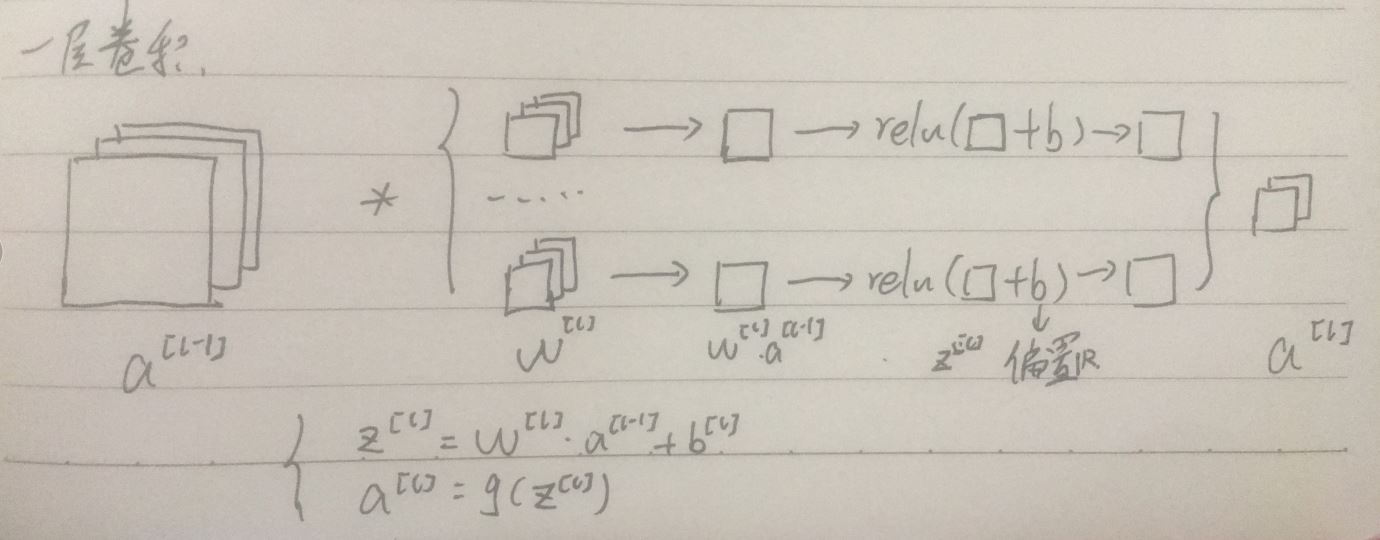
(3)一次卷积操作:一次卷积包括卷积操作以及激活函数的操作,非线性激活函数是必须的,单次卷积注重于对局部特征的提取
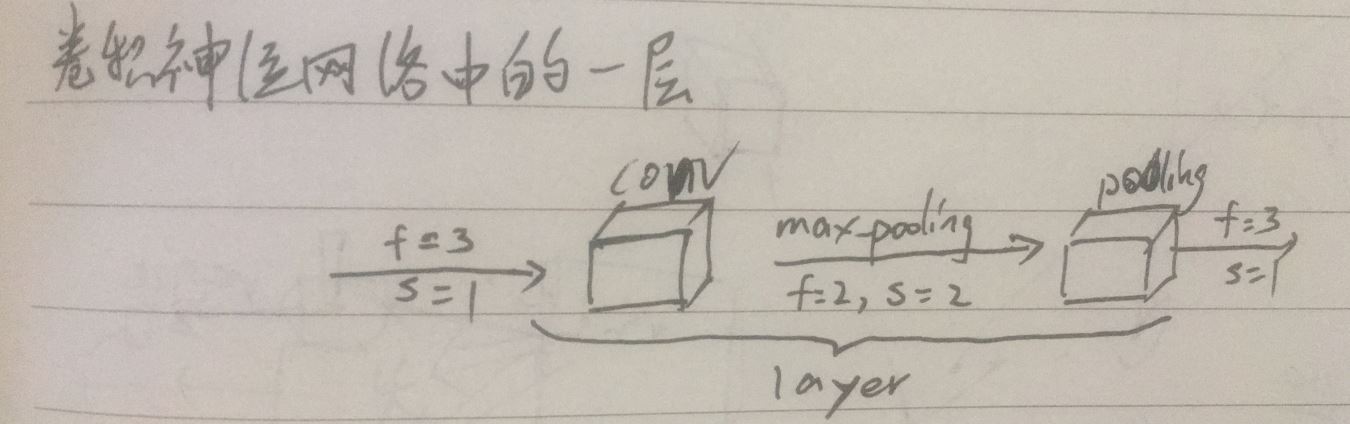
(3)卷积神经网络中的一层:卷积网络中的一层卷积指卷积层和池化层(因为卷积层通常统计具有权重和参数的层),卷积层负责提取局部特征,增加通道数,池化层负责缩小图像尺寸
(4)卷积神经网络:
【1】图像的表面包含了众多可见的信息(比如:线条,颜色等),以及需要人进行分析提取才能得到的隐含信息(比如:人的动作,表情等),卷积神经网络是模拟人脑的,人脑对信息的处理也分层(6层?),最外面的大脑皮层接受外界输入--最直观的图像,通过一层层神经元的处理,到最后得到深层次的信息--人的行为心理,这就是人类的认知,而且,有关研究证明:相比于其他动物,人类的神经元层数明显多于其他动物,而且更复杂,灵长类动物的神经元层数也比其他动物丰富,这说明人类与动物的差别在于认知,人类能挖掘出更深层次的信息,那问题来了,又有证明表示人类对大脑的开发不足,若人类要进化,则必须要先开发大脑,提高认知能力.....
【2】卷积神经网络模拟人脑,一般而言,层数在5-7层的效果更好(效果的好坏是人根据自身定义的,上限为人类的认知上限,所以,过多层数显现出来的‘差’的效果,说不定,是人脑不能理解,但是是更深层次的抽象信息,若我们通过不断归纳总结来理解这些信息,是不是相当于对人脑进行有效的开发?而且,不同人有不同的认知只是由于每个人的经历不同,也就是说每个人获得的输入不同,导致最后训练的人脑参数不同,若能获取这些参数和网络模型,输入进机器中,人类也就......),输入一个图像,通过不同卷积核过滤出不同特征,一层层对低级特征进行抽象,得到最终的高级特征,卷积网络的训练是对卷积核的训练,为了得到我们想要的特征,而不是什么特征都能够拿来使用,因为我们有标签,有目标。
三.通道(channel)
1.每个通道有一张灰度图,其中像素大小表示亮度的强弱,0表示暗,255表示亮,三通道可以用rgb三种颜色进行渲染,使得呈现给我们的图像是彩色的,而多通道无法具体呈现
2.卷积网络中,通过卷积操作到最后,每个通道的值或图像是由卷积核进行卷积操作,一层层过滤特征得来的,也就是说到最后,每个通道的图像代表一种局部特征,因为卷积核过滤掉了其他特征
3.一般而言,每层卷积后,卷积核的数量为输出图像的通道数,通道数翻倍,图像大小缩小四倍
(1)解释:每个通道代表一个特征,每个高级特征是前一层低级特征的组合,假设前一层特征有n种,则该层的特征组合最多有2**n中,因为每种低级特征有可以取或不取两种选择,也就是说通道数可以达到2**n个,通道数越多,网络的效果更好,但是,现在的算力不够,所以通道数不能取那么多
(2)其二,一般而言,每层卷积后图像的尺寸在H方向变为原来的二分之一,在W方向变为原来的二分之一,也就是一层卷积后,每个通道图像的大小缩小了成原来的四分之一,我们做卷积网络的目的是使得每次卷积后,整个图像的大小要变小,最终得到一个值或几个值 ,所以一般限制通道数的增长不能超过四倍,一般设置通道数为原来的两倍,当然也可以设置其他值,比如变为原来通道数加一个固定值等等
四.过滤器filter(卷积核函数kernel)(特征feature):一个包含长、宽、深三个属性的的三维张量(长方体),用于和输入的多通道图像作卷积运算
1.名称解释:
(1)过滤器:卷积核对输入进行卷积运算,得到我们想要的特征,也就是说卷积核能够过滤掉我们不需要的特征
(2)核函数:核函数是指用一个函数代替两个函数的内积,和卷积的定义相似
(3)特征:卷积核用来特征提取,本质上也是一种特征(万物皆可特征)
2.注意
(1)一层卷积,有多少个卷积核,输出图像就有多少个通道,而且这些卷积核都不一样,需要反向传播计算梯度更新卷积核参数,卷积核中每个元素对应一个权重参数,即模型通过训练数据自动找到好的过滤器,学习想要的特征
(2)每个卷积核的深度和输入图像的深度一致,卷积计算是所有对应元素相乘求和得到一个像素,通过滑动窗口的方式得到一个输出图像
(3)卷积核的长宽一般相等,卷积核大小越大越好,当和输入同大小时,就变成全连接了,但是带来参数巨多、训练难的问题,当为1时,不考虑周围元素,卷积后图像大小不变,通常用于改变通道数,是对特征的重新线性组合,就是对原图中的一个像素点的所有通道的线性变换。卷积核大小一般为奇数,比如3x3、5x5...常用3x3(已证明比5x5好:一次5x5的卷积,相当于两次3x3,同时参数个数由5x5xn变为2x3x3xn,减少了百分之28,而且,两次3x3比一次5x5更注重局部特征的提取,所以一般用3x3),卷积核大小为奇数是因为
【1】只有一个中心像素点会更方便,便于指出过滤器的位置;
【2】为了便于对称填充padding
(4)同一通道上所有像素点所用的卷积核一样,卷积参数一样,卷积窗口不一样
(5)坐标相同,不同通道的像素点卷积窗口一样,但卷积核不一样,卷积参数不一样
(6)卷积核越大,效果越好,特征越抽象,但带来计算的相关问题
五.步长stride:每次操作,过滤器窗口滑动的距离,整数,最小为1
1.步长一般不大于卷积核大小,若步长太大,则会有一些特征未能被有效提取,若步长太小,提取特征会很全面,但是计算量也大,
2.步长也分上下和左右两个步长,用元组表示,一般在长和宽两个方向的值,行进顺序是从左往右,从上往下,过滤器不超出图像
3.s=1的过滤器更注重局部特征的学习,一般用于卷积操作,而s=2的卷积表示跳格平移,用于减小图像尺寸,一般用于池化层
六.填充padding:一般在卷积的开始前进行边缘扩充
1.为什么要padding?
(1)卷积是在图像里进行的,一般而言,卷积核大小大于1,这就导致边缘的点和中间点的卷积的不公平,这就会导致丢失图像边缘的一些信息,所以在卷积前在图像边缘添加一层层像素点就有了意义,使得边缘的点能像中间的点一样,参与多次卷积运算
(2)若不填充,由于卷积元素设定不超过图像,则当卷积核大于1时,图像尺寸经过卷积后必然减小,也就是丢失了部分信息,这与我们期望不符
2.padding常用模式
(1)'valid':不填充
(2)‘same’:填充padding,使得填充后,使得原来按步长卷积后需要丢弃的像素,可以在补padding后参与计算,即:当步长为1时,输入和输出图像大小一致;当步长为2时,输出图像的大小为输入图像的一半...
3.注意
(1)我们添加padding像素点,是表示一层层的添加,而且最好是对称添加,若是奇数,多出1,则约定:左边比右边少1,上边比下边少1
(2)卷积的图像是padding之后的图像,而不是padding之前的图像
(3)padding的大小可以表示单边添加的层数,也可以表示双边添加的层数,这需要指明
七.激活函数
1.激活:现实中是指人脑神经元的激活,在神经网络中是指映射变换。卷积神经网络中一般使用relu非线性函数
2.和神经网络加入激活函数原因一样,添加非线性变换使得神经网络拟合能力更强,拟合多折线(曲线),(举例:若是全连接,则样本点之间用直线
(1)补充:非线性变换对神经网络的影响:二维空间中,神经网络的实质是用线来拟合样本点,若是一个输入,一个神经元,一个输出的网络,则它的数学表达式为y=ax+b,这表示用一条直线拟合每两个样本点,若加了relu函数,则表示用一个斜率任意的二折线来拟合每两个样本点,当该层神经元数增加1时,表示进行了两次二折线操作,即把这两条二折线叠加,用有一条三折线来拟合每两个样本点,同样,n个神经元就表示用一条n+1折线拟合两个样本点,最多有n个折点。而若是sigmoid函数,则表示用曲型拟合每两个样本点,极端情况sigmoid变成弓型拟合(梯度消失时),这反而造成了拟合的难度
(2)样本数和神经元数相同时,网络拟合的是每两个样本点之间的连线,单次全连接参数的个数,是此次折点数目的上限,当在多维空间时,使用超平面进行拟合,神经网络实质就是通过大量样本统计归纳规律,训练的实质就是拟合已知样本点,目的是对于未知样本点,找到其相邻样本,从而进行预测等操作
(3)补充:模型崩溃:参数发生一点更改,模型的结果变化巨大。原因:多维时,参数的微调可能导致相邻点的剧烈变化,从而导致模型结果通过训练发生巨大改变
3.常用激活函数
(1)sigmoid:反向更新梯度时,梯度最大为原来的四分之一(0时),这就导致更新几步,用链式法则求梯度后,梯度会趋向于0,到达饱和区,导致梯度消失,而且,在训练时,还应对输入作归一化处理,所以,一般不用其作为卷积后的激活函数,常用于做最后输出时求解一个概率值
(2)relu:常用于卷积层激活函数,计算简单、无梯度消失的问题,但是,当为负值时,激活值0,负梯度为0,可能会导致一些节点‘死亡’,网络变稀疏,所以应把lr设置的小一下,使得其变化地不那么剧烈;其二,当参数变大时,由于链式法则反向更新梯度,也有可能会导致梯度爆炸,
八.池化pooling:考虑到相邻特征可能具有某些关系(比如相邻像素点相似--衣服单一颜色),同时某些特征是我们不需要学习的(特征冗余),则我们可以用一个点特征来代替一块区域的特征,也就是池化操作
1.常用池化
(1)最大值池化(max pooling):计算图像区域的最大值作为该区域池化后的值。排除一些不需要的特征,保留纹理信息,最常用
(2)均值池化(Average pooling):计算图像区域的平均值作为该区域池化后的值。保留图像的背景信息,容易造成特征稀释(一大一小取均值时)
2.优缺点
(1)优点:
【1】简单,无可训练模型参数,只是单纯的计算,一般有两个超参数:过滤器大小f和步幅s,所以减少了网络的训练参数,减少了计算量
【2】池化层一般在卷积层之后,保留主要特征,去除冗余特征,减少了卷积层输出的特征数,变相地增加了下层卷积核的感受野,也就减弱了特征过多带来的过拟合问题
(2)缺点:实际上pooling层丢失了一部分信息,可能会导致一些问题
(3)本质:采用pooling通常是为了减少一半的图片尺寸,计算时尽量不重叠,通道数不变,本质上是进行了特征选择(保留主要特征,去除冗余特征),
(4)关于梯度:反向计算梯度时,有值的地方才有梯度,均值池化的梯度要除以卷积核元素数量,也就是梯度之和不变
九.其他
1.卷积实质:积分运算的离散实现,用以挖掘图像中的特征
【1】单次卷积是全连接操作的一种特殊情况,是线性的,是对图像局部特征(一些像素)的处理,将其转换为一个稍大一点的‘局部’特征(一个像素),局部的大小由卷积核大小决定
【2】每一个卷积核对一个图像作的卷积是对整个图像进行特征过滤,为了提取自己想要的关于图像的一个特征(一个通道)
【3】每一层卷积就是对图像中的各个特征的提取,多个通道代表多个特征,输出的多个特征间相互独立,因为参数不一样
【4】卷积神经网络:通过一层层卷积,得到最终想要的特征,
【5】卷积网络的训练:通过输入相似图片,进行卷积后,得到抽象的特征,将低级特征抽象为高级特征,是一种总结归纳,统计规律,比如:很多有实际人脸的图像,通过卷积后,得到‘人脸’这一个概念--有眼睛、嘴巴等,要抽象出什么特征取决于我们的目的,也就是标签,再通过不断优化参数得到最终能够提取我们想要特征的过滤器
2.经验:一般5-7层卷积最佳,单层最佳组合:卷积层(f=3,s=1,'same')+池化层(f=2/3,s=2),卷积层注重局部细节特征的学习,池化层注重全局特征的选择,两者的组合相当于使用一个更大的卷积核进行卷积操作
3.参数共享:卷积核提取的是特征,它本身也是一种特征,也就是说,无论对于图像哪里,它提取特征这个特性是不会改变的
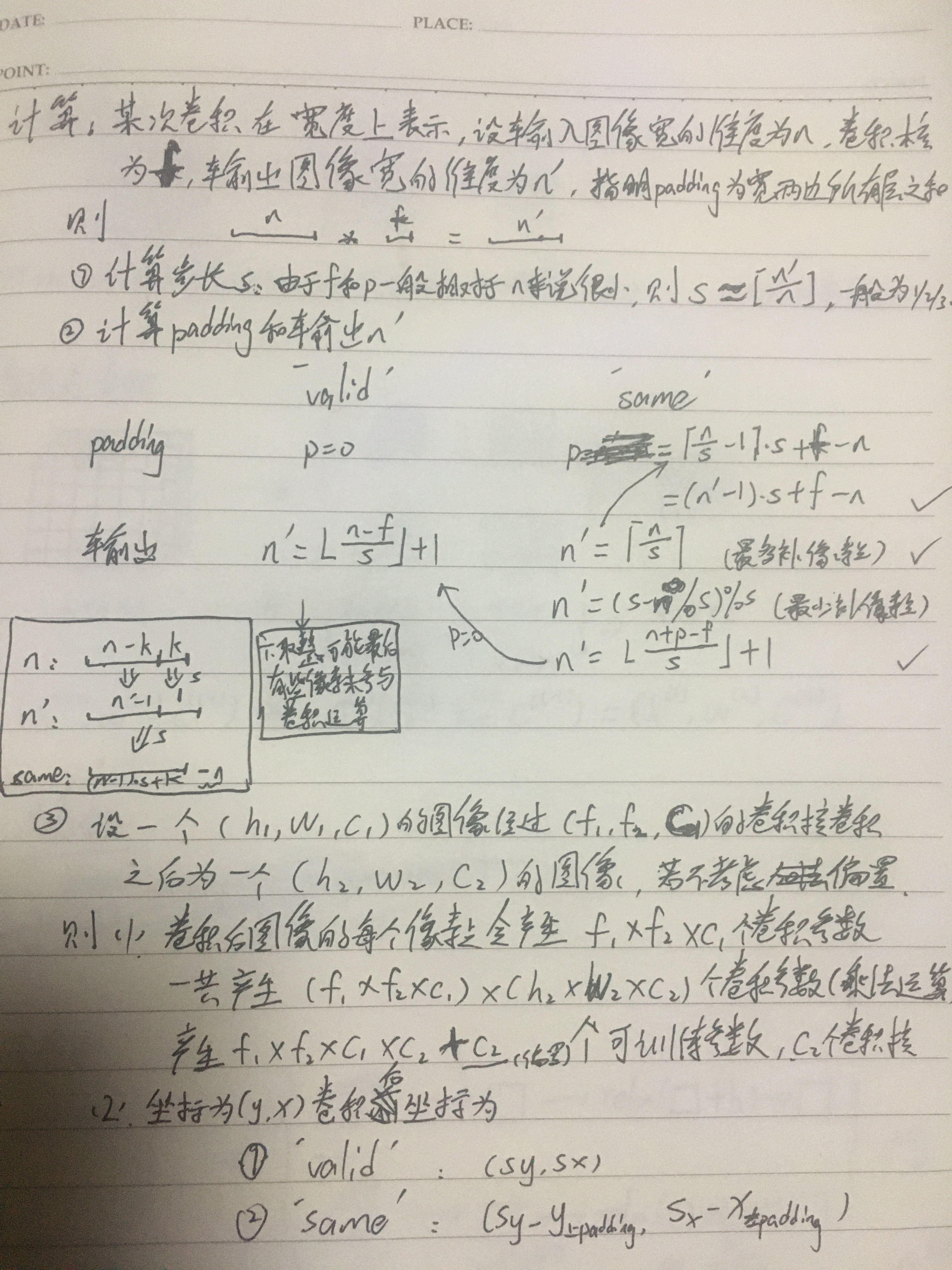
4.相关计算
十.卷积网络结构
1.经典卷积网络结构:自己设置参数
(1)输入:对于一张3通道的图片,关于图像尺寸,没有要求,但有时可能需先resize到我们需要的长宽一致的尺寸,比较好处理,比如224x224,再输入到网络中,而且输入尺寸最好为2**n的倍数(比如:若卷积5层,最好输入32的倍数)
(2)第一次卷积:需先将3通道的图像卷积为偶数通道的图像,比如64,32,16...
(3)中间卷积层:每层卷积都是一层卷积操作用以提取局部特征(f=3,s=1,'same'),全连接操作参数多,容易过拟合,卷积不容易过拟合,池化操作用以缩小图像尺寸,关注全局特征(s=2,f=2/3,max_pooling),这样,每次卷积后图像通道数增一倍,图像尺寸变为原来四分之一,通常4-5层卷积层
(4)输出:将最后的一层的卷积输出先拍扁成向量(flatten),再进行一些全连接(FC)到我们需要的logits输出向量,根据需求对logits进行处理
【1】若是求一个值,则logits是一个值,若是一个概率值,需再用sigmoid函数将其转为概率,损失计算是将其直接与标签比较
【2】若目标是求得一个多维向量,则logits是一个向量,若是算几个概率,则需用softmax函数将这个logits向量变为概率向量,此时,若标签是一个值,则需先转为onehot向量,损失计算为概率向量与onehot向量在每个维度上的差距求和
【3】拍扁+全连接=全局卷积,全连接层在cnn中起到‘分类器’的作用,因为卷积层是注重从局部到整体的特征提取和组合,得到的每个特征是关于整个图像的一个全局特征,注重图像的全局信息,这些全局特征都是相互独立的,而且未能体现各个全局特征在图像中的空间位置信息,因此要将它们组合起来,通过全连接得到一个较为完整的、既包含全局特征、又包含位置信息的特征,再将其全连接映射为类别特征,进行softmax分类,比如卷积层得到一些特征:眼、耳、口...而输出的人脸类别具有位置信息,在全连接层将他们进行重新组合,形成真正的人脸特征
【4】另外:全连接:指下一层的每个节点都与上一层每个节点有关,在CNN中则是图像与和图像大小一样的卷积核作卷积,CNN中的全连接层是把图像拍扁再作全连接,实质是特征组合;全卷积网络就是把CNN后面的全连接层变为卷积层,但不要求图像尺寸,是局部特征的组合
(5)局部连接:每个输出值只与部分输入有关;共享参数:一个卷积核用于一整张图像,提取各个局部特征
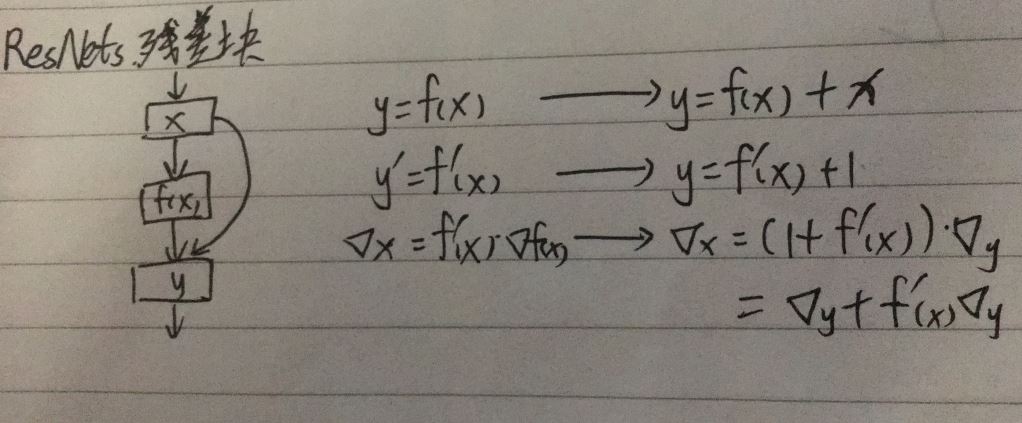
2.残差网络(ResNets)(Residual Networks):残差捷径
(1)相关概念:
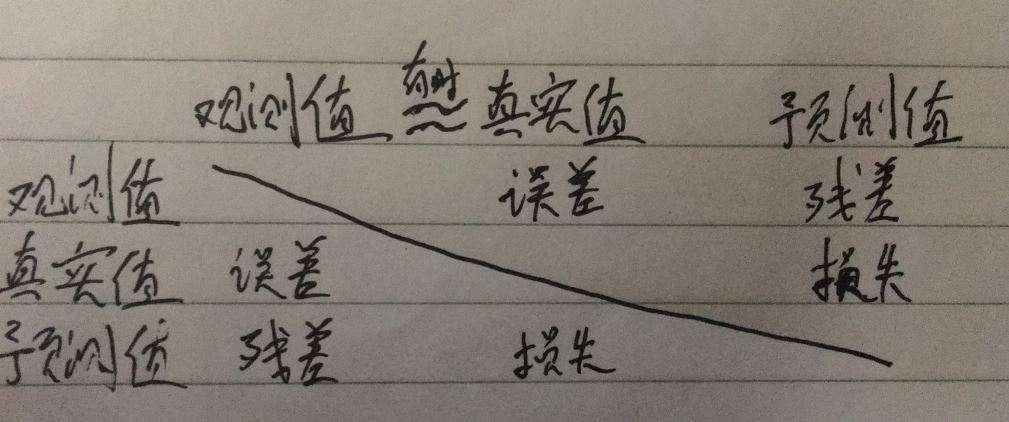
【1】误差:观测值与真实值的差距;偏差:个别观测值与观测均值之间的差距;残差:观测值与预测值之间的差距;损失:预测值与真实值之间的差距
【2】一般而言,真实值是不知道的,观测的目的是为了得到真实值,我们用多次观测的结果统计规律得出的值代替真实值,也就是说有时把观测值代替真实值
(2)结构和改变
(3)特点:
【1】从梯度角度,本被可能导致的梯度消失的问题不容易发生,从而解决梯度消失问题,而且根据梯度反向传播的原理,一个残差块其实就是一层的传播,也就解决了网络过深带来的训练效果差的问题,它所真实的层数其实很小,一个残差块只是一层
【2】从模型角度,就是在本身网络层与层之间加入了一些残差学习层,为了学习原来网络没有学到的信息,所以一般而言,增加了残差学习的网络效果比原来更好,而且,若跳转学习的错误率为e1,残差学习的错误率为e2,则整个模型训练的错误率变为两者都出错的概率e1*e2,模型犯错的概率降低,类似于集成方法思想(GBDT)
https://blog.csdn.net/u013181595/article/details/80990930
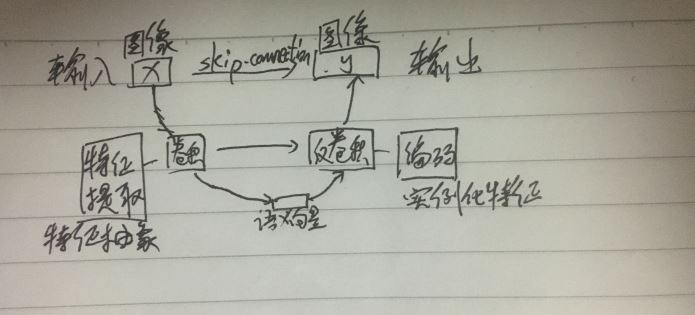
3.Unet:图像到图像
(1)特点
【1】输入一张图片,输出一张图片,整个网络看上去是对称的,和生成模型类似,先将输入图像进行特征提取,也就是编码过程,再利用反卷积进行解码操作得到输出图像,为了防止信息的丢失,还加入了skip-connection
(2)skip-connection:在用特征抽象后得到的语义向量(高级特征,全局特征)还原到和原图相关的图像(低级特征,局部特征)时(先确定整体,再确定局部),实例化特征时可能带来信息丢失的问题,也就是和原图像关联程度低,所以加入了skip-connection,也就是说,把encode时得到的特征图和decode时的特征图对应,在编码阶段保存特征图(堆栈),在解码阶段,将堆栈中的特征图加入其中,得到对应的解码时的特征图
(3)反卷积(转置卷积):是一种特殊的卷积,通过一定的补0,扩大图像尺寸,但是不能还原数值
(4)常用于语义分割、实例分割,图像增强、性别变换等,不加全连接fc
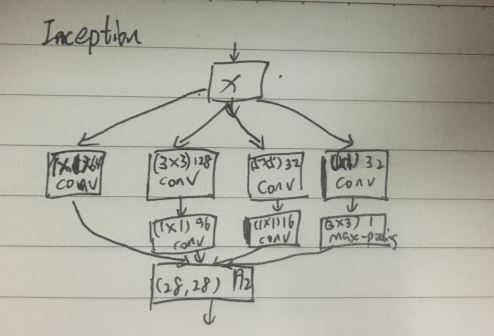
4.Inception:图像到图像
(1)特点:让网络代替人工来确定使用什么卷积核和池化层相关组合
【1】引入1x1卷积改变通道数,对特征重新组合
【2】通过增加网络的宽度丰富每层的信息,来提高网络性能
【3】让原图经过各种操作后,根据通道feature将他们的结果concat组合起来,
【4】适用于大特征和小特征同时存在的图像,常用于人脸检测,要跟fc
十一.应用方向
1.应用:卷积神经网络将低维特征抽象为高维特征,使用的映射思路是不断提取局部特征从而得到全局特征,多用于图像,可以应用于语音、文本等
2.图像分类(image classification):识别图像内容
(1)流程
【1】输入:一些图片,可能带有类别标签,这个标签的表示可能是一个值,可能是一个语义,也可能是一张特征图。一般一张图片对应一个类别标签,也可能一张图片对应多个标签,这一个数据集可能有多个类别,将其放入cnn中训练
【2】输出:输出的类别标签,和给定真实标签作损失计算,反向梯度更新参数,注意:输出可能是一个值,也可能是多个值,有时要用softmax
【4】预测:给定一张图片,可以通过训练所得的网络后,输出它的类别
【5】目标:预测一张图片的类别
(2)应用:图像识别、人脸验证
(3)人脸识别:
【1】问题:有一个人脸数据库,输入一张人脸,若数据库中只有一张或没有该人脸,该怎么判断?重新训练模型在现实中是不可能的。解决:生成每个人脸的语义向量,将这张人脸的语义和数据库中每个人脸语义进行比对,低于某个阈值,表示这两张图片是一样的
2.图像分割:理解图像各个像素的意义(类别),画语义或实例的轮廓,轮廓不会交叉或重叠
(1)语义分割(semantic segmentation):语义就是类别,对图像中每个像素点进行分类,得到每个类别物体的轮廓
【1】是N+1的对于每个像素的分类问题,N表示图像中的所有类别总数,1表示背景,对于每个像素进行预测分类,从而分割出不同类的区域,可以把同一类物体的轮廓标注出来----若有两个物体是同一类而且连接在一起,则会判别为同一类物体,轮廓也是这两个物体的外轮廓
【2】常用方法:类似于UNet,先用卷积从原图中提取抽象特征,再用反卷积映射为一样大小的类别图像,并标注对应物体类别,从而知道原图上有什么,在哪里,像素之间完全映射,
(2)实例分割:实例就是单个物体,对图像中每个像素点进行分类,得到每个实例物体的轮廓
【1】是N+2的每个像素分类问题,N表示前景中类别总数,2表示背景和边界两类,根据像素分类结果,根据边界,将不同个体分割出来,再用另一个网络进行类别判断
(3)特点:样本难以标注(画轮廓),模型简单,效果好
3.目标检测:图像中目标物体的定位+分类
目的:给定一个图片,能够用一个长方形的框将目标对象框起来,长方形框可以重叠,也就是能够检测目标在图像中位置和类别
相关概念:
(1)绑定框(bounding box-倾向于单个框)(ground truth-倾向于框的集合):指用来框出图像上物体的长方形框,一般用一个五元组表示:左上角纵坐标x,左上角横坐标y,框的高度h,框的宽度w,框中物体的类别c;若绑定框完全框住某个物体,则为正绑定框,否则为负绑定框
(2)候选框:图像上的子框
(3)图像交并比(Intersection Over Union,IOU ):两个图像交集的面积除以并集的面积,用以衡量两个图像的位置上的相似度
(4)非极大值抑制(Non-Maximum Suppression, NMS):找到与标签最接近的候选框:对于某个物体绑定框,计算所有候选框跟它的IOU,选择其中最大的候选框作为预测该物体的框,对于它,计算其他相似候选框与他的IOU,设定阈值(如0.8),大于阈值的候选框抑制(在小样本集上排除,不作为输入,不参与下一步IOU计算,但在大样本集上,这些固定的候选框是不变的),重复以上步骤,对每个大样本,依次找到每个物体预测的框并排除不能预测物体的框
【1】若阈值高了,只有很接近的框才会被抑制,则留下一些相似的负框,干扰模型训练;若阈值低了,会抑制很多框,导致一些BB框不能选择很好的正框(但两个物体很接近了,本来很好的候选框可能被抑制),导致训练的难度
(5)锚框(anchor box) :对于一张图像上的每个像素点,按照长宽比例和单位长度给出每个像素点的锚框,比如长宽比例有1:1,1:2,2:1,最小单位长度有1,2,4,则每个像素点有3*3=9中锚框,这些框是以这个像素点为中心的,一般坐标表示是以左上角坐标为该像素点坐标
模型:
1.两步检测法(Two-Stages):第一步根据输入样本产生一些候选框(经验:2000个),第二步对每个样本根据候选框进行物体检测,两步互相独立
一些注意点:
(1)滑动窗口(Sliding Window):对图像进行滑动窗口的操作,穷举产生原图像的不同子图像,再将它放入分类器进行分类,判别出含有物体的窗口图像,采用非极大值抑制筛选出预测的物体,和标签作损失
【1】对于n*n的图像,一共有(1+2+3+...+n)*(1+2+3+...+n)=(n(n+1)/2)**2
(2)RCNN(Region CNN):与滑动窗口最大的不同在于:用某种方法(生成的候选框固定,对所有大样本都一样,可以适用于不同应用场景,一个候选框最多预测一个物体)创建约2000个候选框,而不是穷举
【1】用NMS确定每个物体应由哪些候选框负责预测(注意:这里不是标签,不是正框,只是输入)和剩余的负框
【2】将各个预测候选框从大样本上扣出变成一个个小样本,再resize到同样大小,输入到CNN中,
【3】输出分为类别和框,对应分类(softmax预测类别)和回归(四元组表示位置)
【4】注意:
【【1】】标签:由于约定:输入的值和模型参数应在(-1,1)间,容易收敛;但正框相对于原大样本的坐标很大,这就要求回归输出也要很大,这不利于模型训练,则要把正框的位置作变换,变成最好为(-1,1)间,已知正框坐标,预测物体的候选框的坐标,resize后的大小,则做映射,再作转换,将正框坐标变为(-1,1)之间,从而得到相对于候选框的坐标标签
【【2】】损失:由于负框只关心分类出来的是背景,不关心回归结果,所以loss=正框分类损失+正框回归损失+负框分类损失,分类用交叉熵,回归用均方差;其次,由于负样本很多,导致正负样本数量不平衡,那么训练出的学习器偏向性很大,无价值,所以一般设定一个损失系数(充分学习背景),或者让正负样本的数量差不多(训练快)
(3)FastRCNN:和RCNN不同在于:将大样本输入网络,输入一个唯一特征图,在fm上按照候选框的位置和大小(原候选框要进行缩放和移动)抽取特征
【1】SPP:本质为多次池化操作,目的是把大小不同的区域特征图转为长度相同的一维向量,
(4)FasterRCNN:与FastRCNN不同,该方法提出了RPN(Region Proposal Network)区域候选网络的概念,来给出特征图的候选框
【1】RPN:在特征图上生成候选框。本身是一个卷积网络,给定一个特征图,参考锚框,输出一组候选框
3.一步检测法(One-Stages):样本从模型的输入端进入,直接从输出端输出
(1)SSD(Single Shot multi-box Detector)单次多框检测:给定样本,输入网络中得到不同大小的特征图,在特征图上对应物体位置的每个像素都有锚框,再映射回原图,得到用来预测物体的框,从而得到相对坐标的标签,再将网络的预测值与标签作损失
【1】注意:每个特征图上的锚点最多负责一个物体的预测,每个物体可以被多个锚点检测
【2】重点:卷积操作的特性就是运算后,图像的空间位置信息不变,位置对应关系仍然保持
(2)YOLO(You Only Look Once):与SDD先求出预测物体的缺省框不同在于,YOLO则根据物体BB框的中心点位置确定由哪个像素点来负责预测它,标签的相对坐标是相对于自身来说的
【1】缺点:不能适应大小差别较大的物体,小物体和相邻物体不尽人意;若有两个以及两个以上的物体的BB框的中心点落在特征图的同一个像素内,则只有一个被检测出来;精度稍差
【2】优点:训练快,只有一次CNN
训练:
输入:多个图像样本,每个图像样本上面有若干物体目标,每个物体被不同颜色的长方形框框起,表示五元组标签,颜色表示类别,长方形框表示位置
输出:每个图像样本上的目标的位置和种类,一个五元组,和标签五元组作损失
预测:给定一个图像,可以预测出其中物体的位置和种类,种类是用概率最大的类别作为预测输出

