


Ros学习——移动机器人Ros导航详解及源码解析
1 执行过程
- 1.运行仿真机器人fake_turtlebot.launch:加载机器人模型——启动机器人仿真器——发布机器人状态
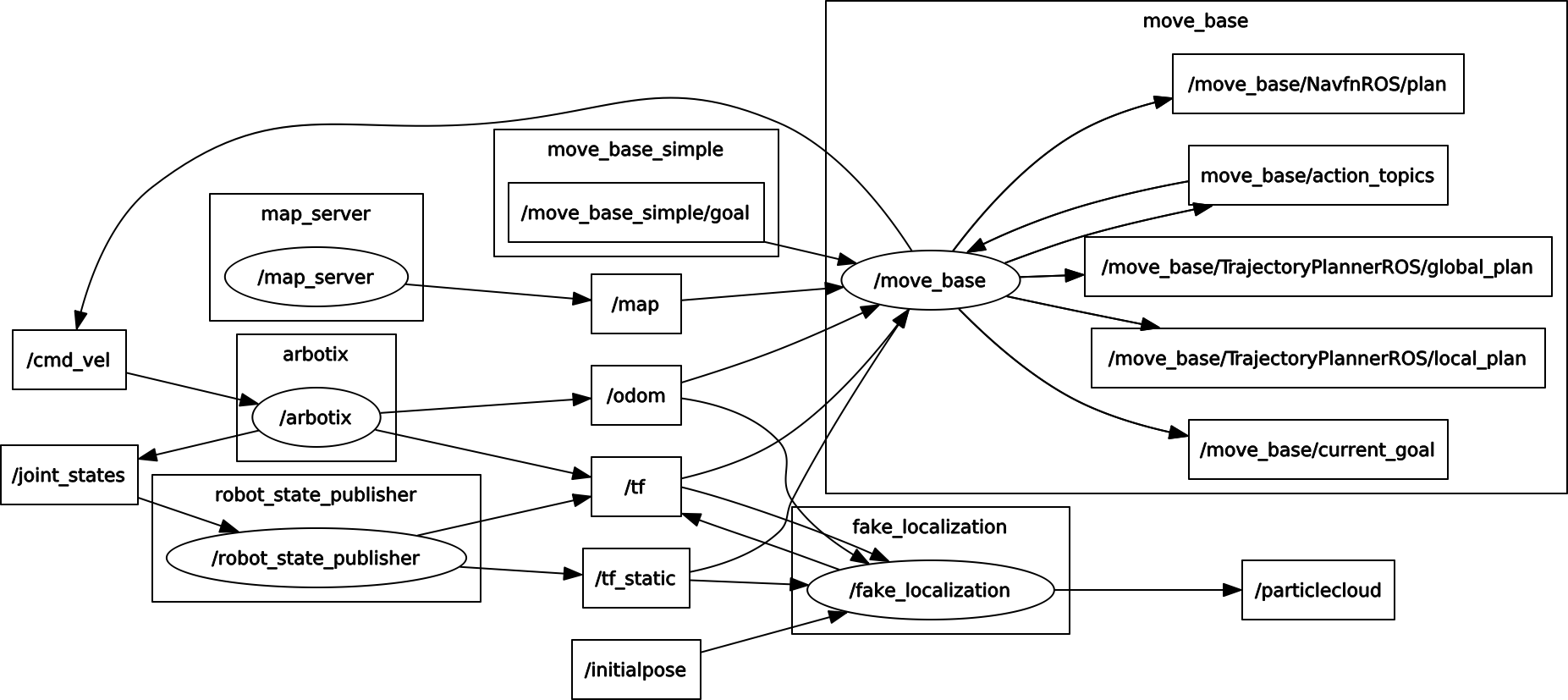
- 2.运行amcl节点fake_amcl.launch:加载地图节点map_server——加载move_base节点——加载fake_localization节点(AMCL)
- 3.运行rviz
2 机器人仿真
//fake_turtlebot.launch
<launch>
<param name="/use_sim_time" value="false" />
<!-- Load the URDF/Xacro model of our robot -->
<arg name="urdf_file" default="$(find xacro)/xacro.py '$(find rbx1_description)/urdf/turtlebot.urdf.xacro'" />
<param name="robot_description" command="$(arg urdf_file)" />
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen" clear_params="true">
<rosparam file="$(find rbx1_bringup)/config/fake_turtlebot_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
</launch>
-
2.1加载机器人模型turtlebot.urdf.xacro,包括:
1.硬件模型turtlebot_hardware.urdf.xacro
2.机器人本体模型turtlebot_body.urdf.xacro
3.标定参数turtlebot_calibration.xacro
4.运动学模型turtlebot_kinect.urdf.xacro
-
2.2 加载arbotix模拟器,即arbotix节点(加载配置文件:fake_turtlebot_arbotix.yaml)
port: /dev/ttyUSB0
baud: 115200
rate: 20
sync_write: True
sync_read: True
read_rate: 20
write_rate: 20
controllers: {
# Pololu motors: 1856 cpr = 0.3888105m travel = 4773 ticks per meter (empirical: 4100)
base_controller: {type: diff_controller, base_frame_id: base_footprint, base_width: 0.26, ticks_meter: 4100, Kp: 12, Kd: 12, Ki: 0, Ko: 50, accel_limit: 1.0 }
}
-
2.3 加载robot_state_publisher节点(设置频率publish_frequency:20)
3 机器人控制
//fake_amcl.launch
<launch>
<param name="use_sim_time" value="false" />
<!-- Set the name of the map yaml file: can be overridden on the command line. -->
<arg name="map" default="test_map.yaml" />
<!-- Run the map server with the desired map -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find rbx1_nav)/maps/$(arg map)"/>
<!-- The move_base node -->
<include file="$(find rbx1_nav)/launch/fake_move_base_amcl.launch" />
<!-- Run fake localization compatible with AMCL output -->
<node pkg="fake_localization" type="fake_localization" name="fake_localization" clear_params="true" output="screen">
<remap from="base_pose_ground_truth" to="odom" />
<param name="global_frame_id" value="map" />
<param name="base_frame_id" value="base_footprint" />
</node>
</launch>
- 3.1加载地图服务器节点map_server,配置地图文件:test_map.yaml
image: test_map.pgm //包含占用数据的图像文件的路径; 可以是绝对的,或相对于YAML文件的位置 resolution: 0.050000 //地图的分辨率,米/像素 origin: [-13.800000, -12.200000, 0.000000] //地图中左下像素的2-D姿态为(x,y,yaw),偏航为逆时针旋转(yaw = 0表示无旋转)。系统的许多部分目前忽略偏航。 negate: 0 //白/黑自由/占用语义是否应该被反转(阈值的解释不受影响) occupied_thresh: 0.9 //占据概率大于该阈值的像素被认为完全占用 free_thresh: 0.196 //占有概率小于该阈值的像素被认为是完全自由的
- 3.2加载movebase节点:fake_move_base_amcl.launch——>运行成本、机器人半径、到达目标位置的距离,机器人移动的速度
1.costmap_common_params.yaml:配置基本的参数,这些参数会被用于local_costmap和global_costmap.
obstacle_range: 2.5 //障碍物探测,引入地图
raytrace_range: 3.0 //用于机器人运动过程中,实时清除代价地图中的障碍物
#footprint: [[0.175, 0.175], [0.175, -0.175], [-0.175, -0.175], [-0.175, 0.175]] //将机器人的几何参数告诉导航功能包集,机器人和障碍物之间保持一个合理的距离
#footprint_inflation: 0.01
robot_radius: 0.175
inflation_radius: 0.2 //机器人与障碍物之间必须要保持的最小距离
max_obstacle_height: 0.6
min_obstacle_height: 0.0
observation_sources: scan //设定导航包所使用的传感器
scan: {data_type: LaserScan, topic: /scan, marking: true, clearing: true, expected_update_rate: 0}
2.local_costmap_params.yaml;
local_costmap: global_frame: map robot_base_frame: base_footprint update_frequency: 3.0 //发布信息的频率,也就是costmap可视化信息发布的频率 publish_frequency: 1.0 static_map: true rolling_window: false //true:在机器人运动过程中,代价地图始终以机器人为中心 width: 6.0 height: 6.0 resolution: 0.01 //这三个是代价地图的的尺寸和分辨率,单位都是m transform_tolerance: 1.0
3.global_costmap_params.yaml;
global_costmap: global_frame: map //定义机器人和地图之间的坐标变换,建立全局代价地图必须使用这个变换。 robot_base_frame: base_footprint update_frequency: 1.0 //地图更新的频率 publish_frequency: 1.0 static_map: true //是否使用一个地图或者地图服务器来初始化全局代价地图 rolling_window: false resolution: 0.01 transform_tolerance: 1.0 map_type: costmap
4.base_local_planner_params.yaml;
controller_frequency: 3.0 recovery_behavior_enabled: false clearing_rotation_allowed: false TrajectoryPlannerROS: //机器人的最大和最小速度限制值,也设定了加速度的限值 max_vel_x: 0.5 min_vel_x: 0.1 max_vel_y: 0.0 # zero for a differential drive robot min_vel_y: 0.0 max_vel_theta: 1.0 min_vel_theta: -1.0 min_in_place_vel_theta: 0.4 escape_vel: -0.1 acc_lim_x: 1.5 acc_lim_y: 0.0 # zero for a differential drive robot acc_lim_theta: 1.2 holonomic_robot: false //全向移动机器人那么此值为true yaw_goal_tolerance: 0.1 # about 6 degrees xy_goal_tolerance: 0.05 # 5 cm latch_xy_goal_tolerance: false pdist_scale: 0.4 gdist_scale: 0.8 meter_scoring: true heading_lookahead: 0.325 heading_scoring: false heading_scoring_timestep: 0.8 occdist_scale: 0.05 oscillation_reset_dist: 0.05 publish_cost_grid_pc: false prune_plan: true sim_time: 1.0 sim_granularity: 0.05 angular_sim_granularity: 0.1 vx_samples: 8 vy_samples: 0 # zero for a differential drive robot vtheta_samples: 20 dwa: true simple_attractor: false
5.nav_test_params.yaml
TrajectoryPlannerROS: yaw_goal_tolerance: 6.28 # We don't care about orientation xy_goal_tolerance: 0.1 # 10 cm pdist_scale: 0.8 gdist_scale: 0.4 occdist_scale: 0.1
- 3.3加载fake_localization节点:ACML
3 Rviz显示

