
无人驾驶——4.控制之MPC模型预测控制
源自:《无人驾驶无人驾驶车辆模型预测控制》——龚建伟
参考:https://wenku.baidu.com/view/8e4633d519e8b8f67c1cb9fa.html
0.车辆模型

汽车的车轮转角为δf
分别做垂直于后轮和前轮的射线,这两根射线会交于O点,两轮模型会绕O点进行运动,在短时间dt内,可以认为O点不动。连接O点和汽车的质心成一条线段,实际汽车的运动方向v将垂直于该线段。运动方向ψ与车身方向所成的夹角β,这个角度一般称为偏航角。
β 可以由如下公式计算求得
假设t时刻的汽车的状态为xt,yt,经过dt时间后的t+1时刻,状态为xt+1,yt+1,则他们之间的关系为

根据以上理论即可在丢失定位信息后的短时间内,依靠自身的传感器信息,进行位置和位姿估计。
1.基本原理
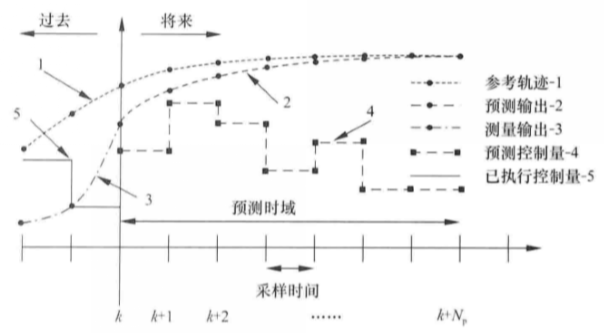
已知(输入):一条期望参考轨迹;当前k时刻的测量值;
设计:预测模型
目标:预测未来一段时域内[k,k+Np],系统的输出
方法:对这段时域内施加一系列控制序列4(k+1时刻的值为实际控制量)
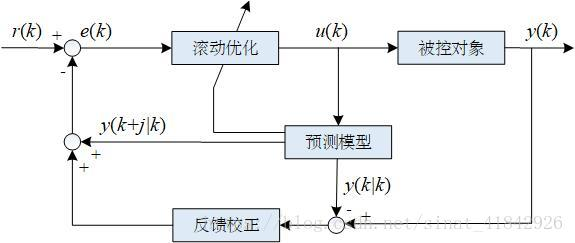
总结起来就是:预测模型;滚动优化;反馈校正
2.控制原理框图
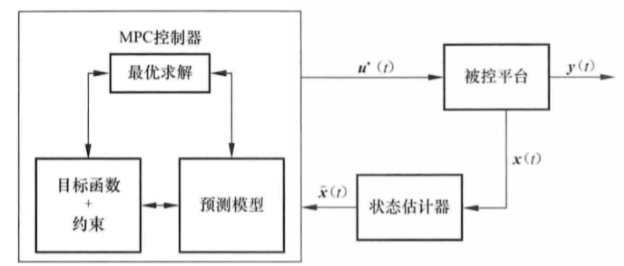
控制过程:
- 预测模型+目标函数+约束条件——>最优控制序列——>被控平台
- 被控平台响应
- 获取状态观测值x(t)——>状态估计器(卡尔曼滤波器、粒子滤波等)——>回到第一步,循环
3.常用模型
3.1 动态矩阵控制DMC
3.2 模型算法控制MAC
3.3 广义预测控制GPC
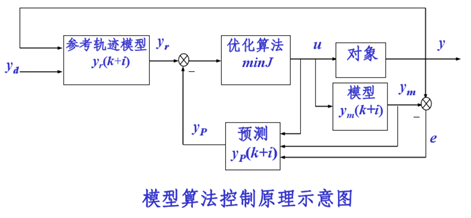
4.模型算法控制 MAC
参考:https://www.cnblogs.com/yrm1160029237/p/10087315.html
http://www.docin.com/p-1186007480.html
目的:使系统的输出沿着预先给定的参考轨迹逐渐到达设定值。
算法组成:预测模型、反馈校正、参考轨迹、滚动优化
其预测模型输出由两部分组成:过去已知控制量产生的预测模型输出、由现在和未来控制量产生的预测模型输出。
4.1 MAC算法原理图

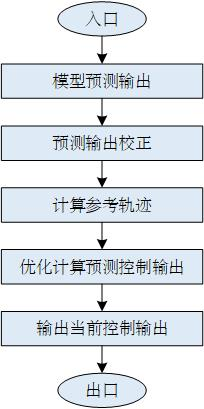
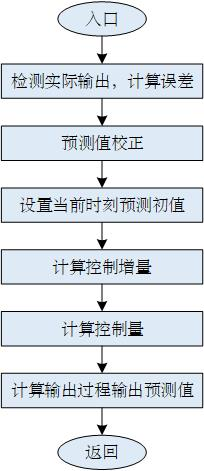
4.2 MAC在线计算程序流程图
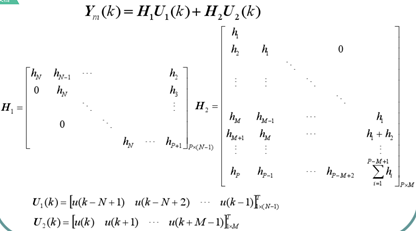
1.模型
- 预测模型:
 ,P-预测时域;
,P-预测时域;
假设:
 ,M—控制时域
,M—控制时域
于是,P步预测值:

从而:
- 反馈校正
当前过程的测量值-模型计算值的差,来修正:

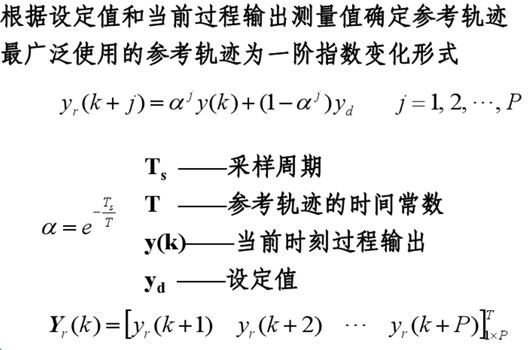
- 设定值(目标点)跟踪——>参考轨迹
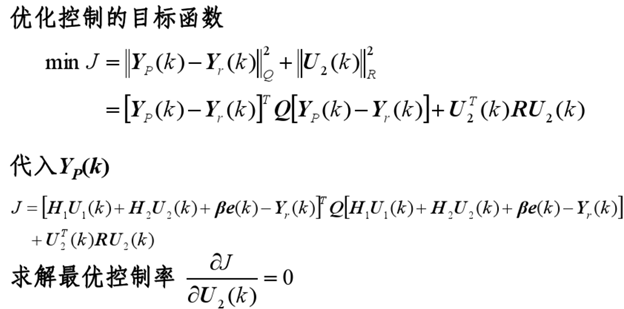
- 最优控制

5.动态矩阵控制 DMC
算法组成:阶跃响应模型预测、反馈校正、滚动优化
其预测模型输出由两部分组成:待求解的未知控制增量产生的输出值、过去控制量产生的已知输出初值。
DMC算法原理图:
DMC在线计算程序流程图:
MPC算法的特点
模型要求不高,不需要深入的了解过程内部机理;
适用约束条件、大纯滞后、非最小相位及非线性等过程;
滚动优化策略能弥补外部因素引起的不确定性,动态性能较好;
缺点:不能描述不稳定系统,不适用于不稳定对象;系统模型在线辨识比较困难。
参考:https://blog.csdn.net/sinat_41842926/article/details/82995065
6.滚动优化
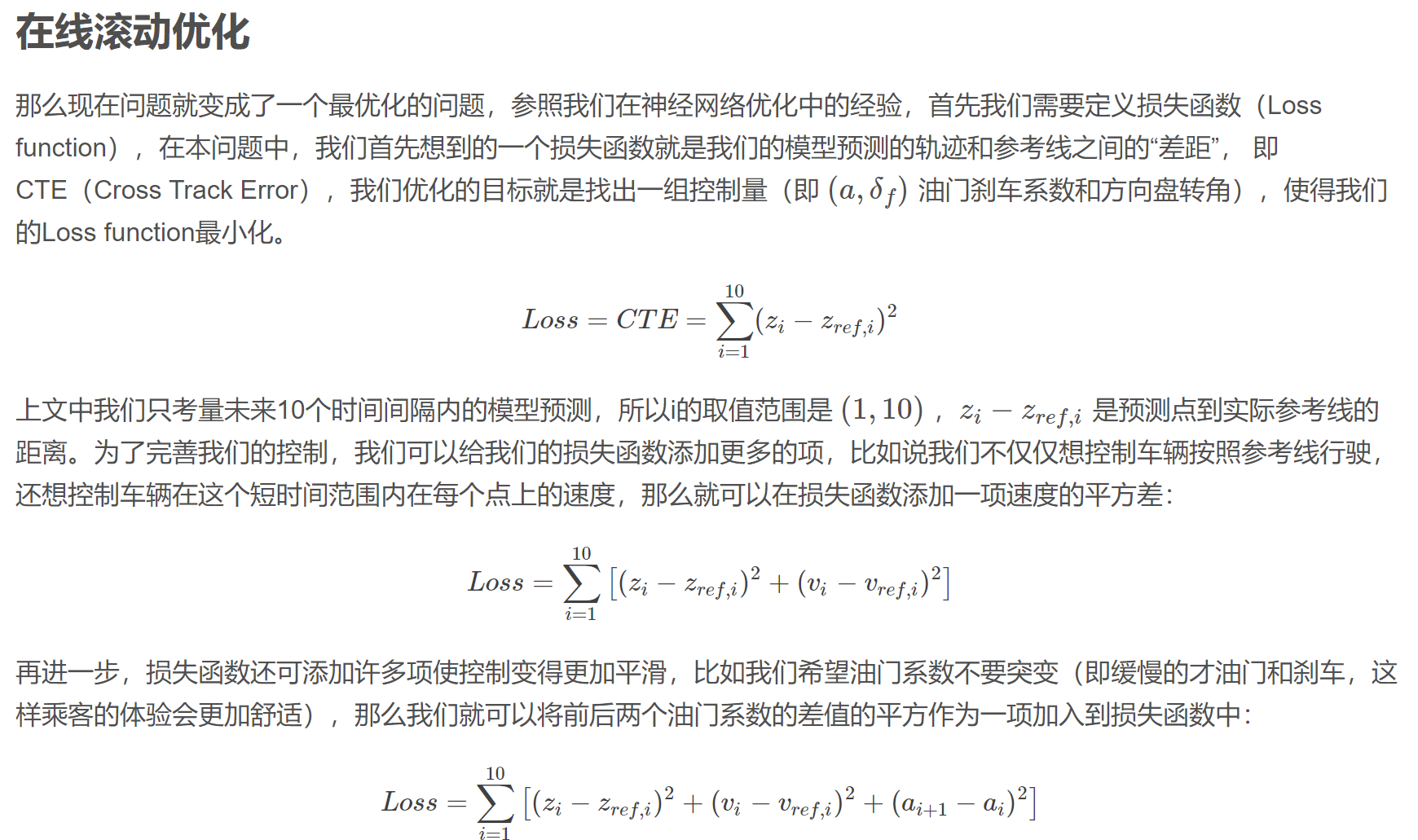
参考:https://blog.csdn.net/AdamShan/article/details/79083755
7.反馈校正
7.1 KF/EFK
7.2 粒子滤波

