MATLAB自动驾驶工具箱的简单使用
文章目录
1. 开环场景
1.1 场景的建立与使用
drivingScenarioDesigner
输入命令,打开场景编辑器
随便加入一些道路和车辆
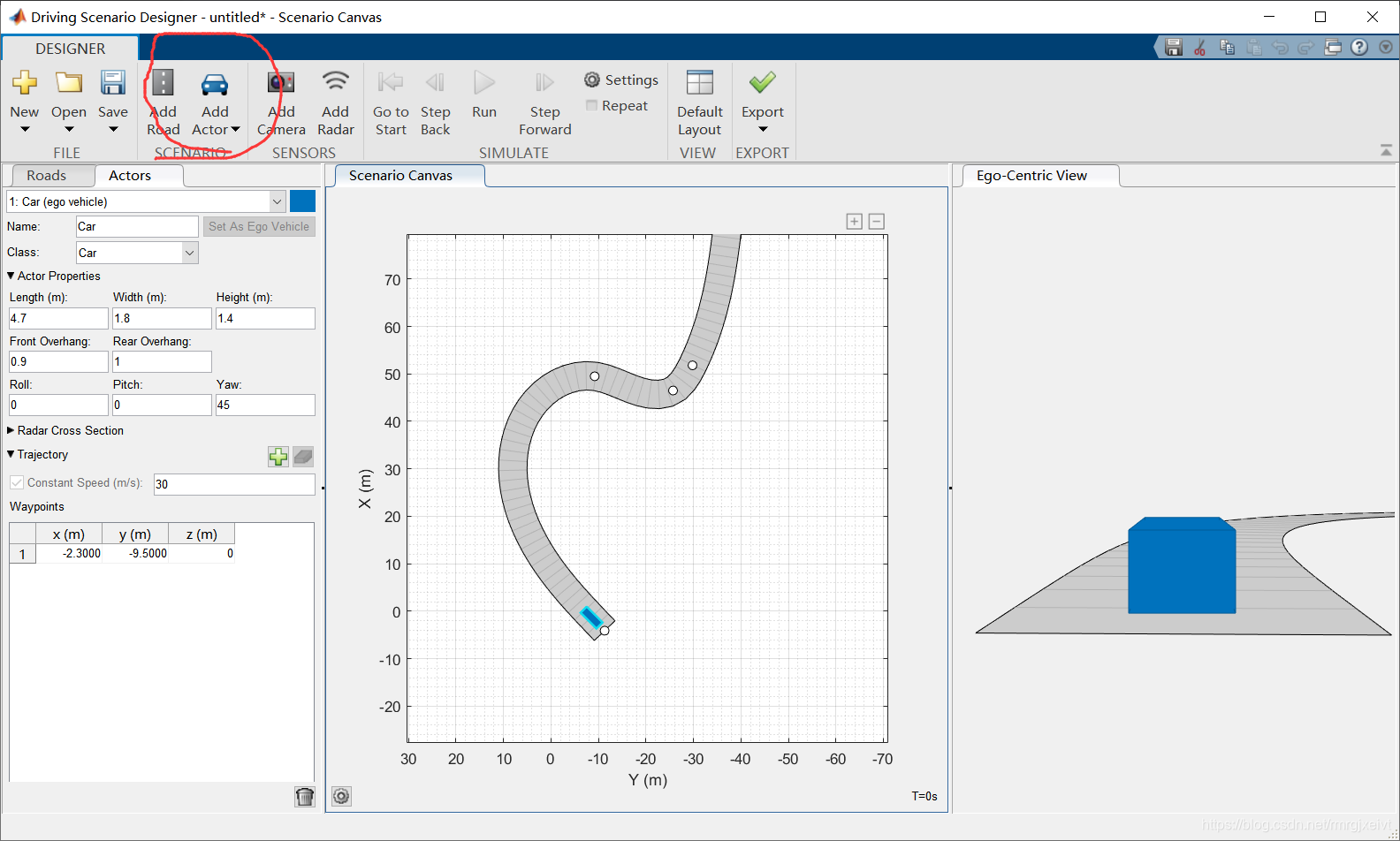
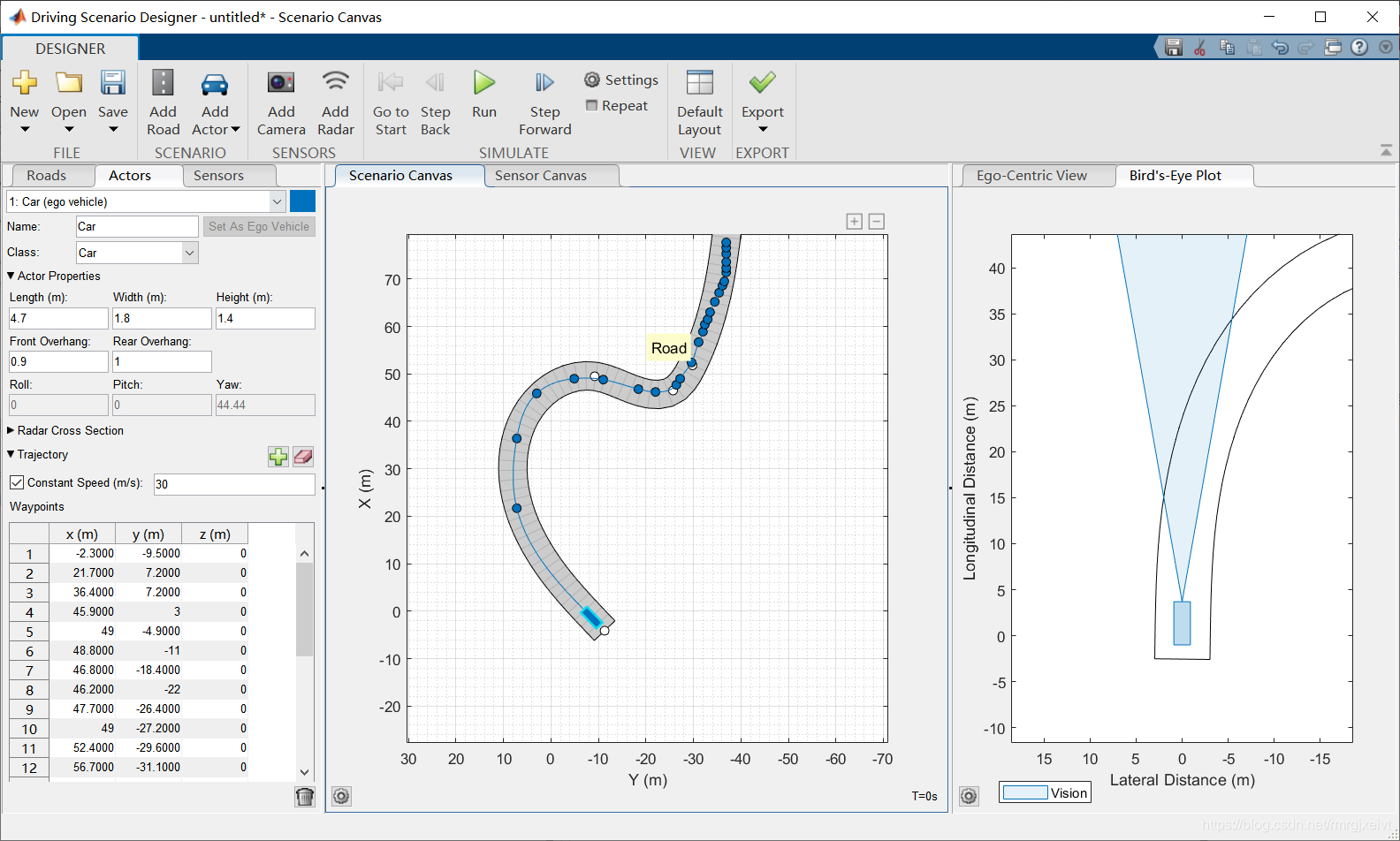
加入车辆行驶路径点,并加入一台camera
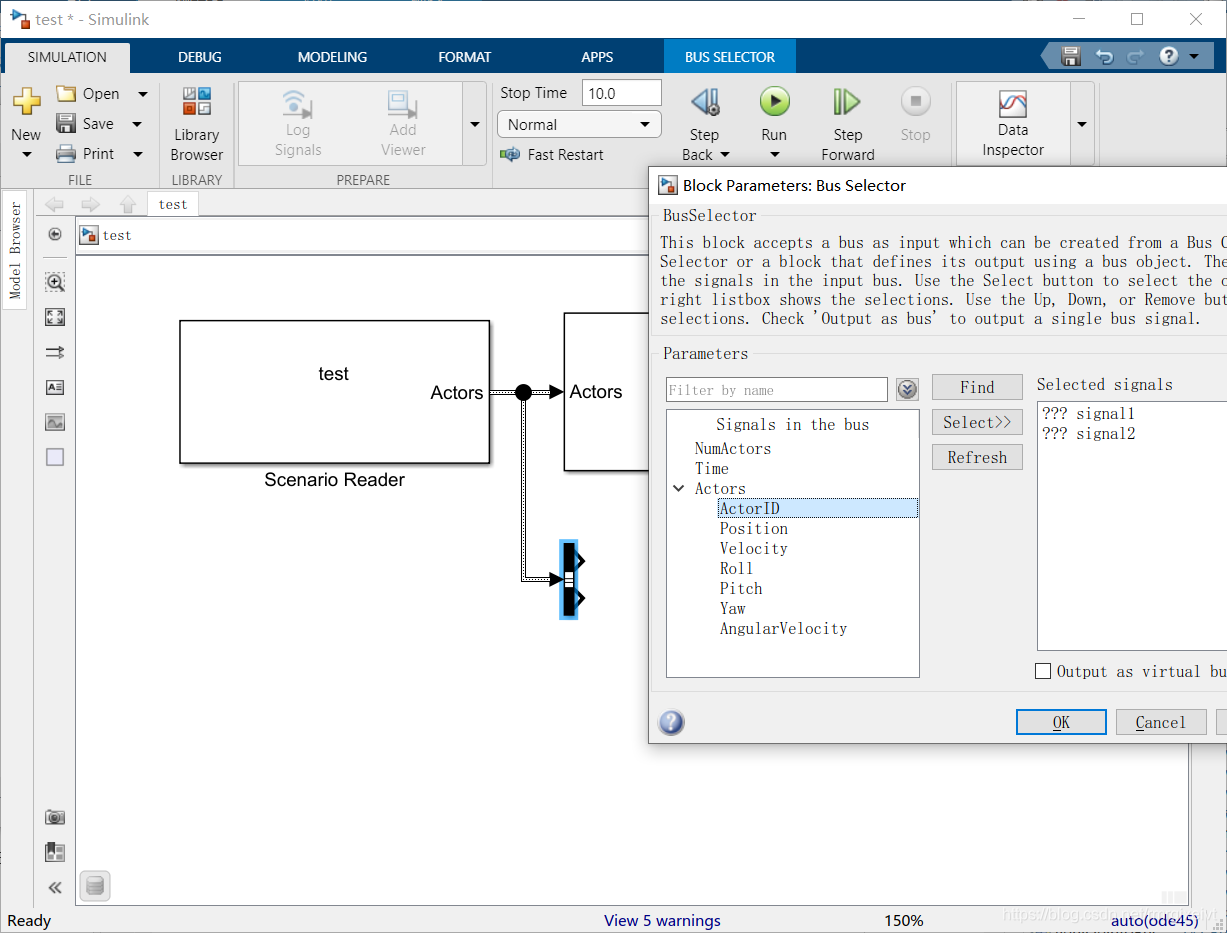
导出到SIMULINK,自动生成slx与mat文件
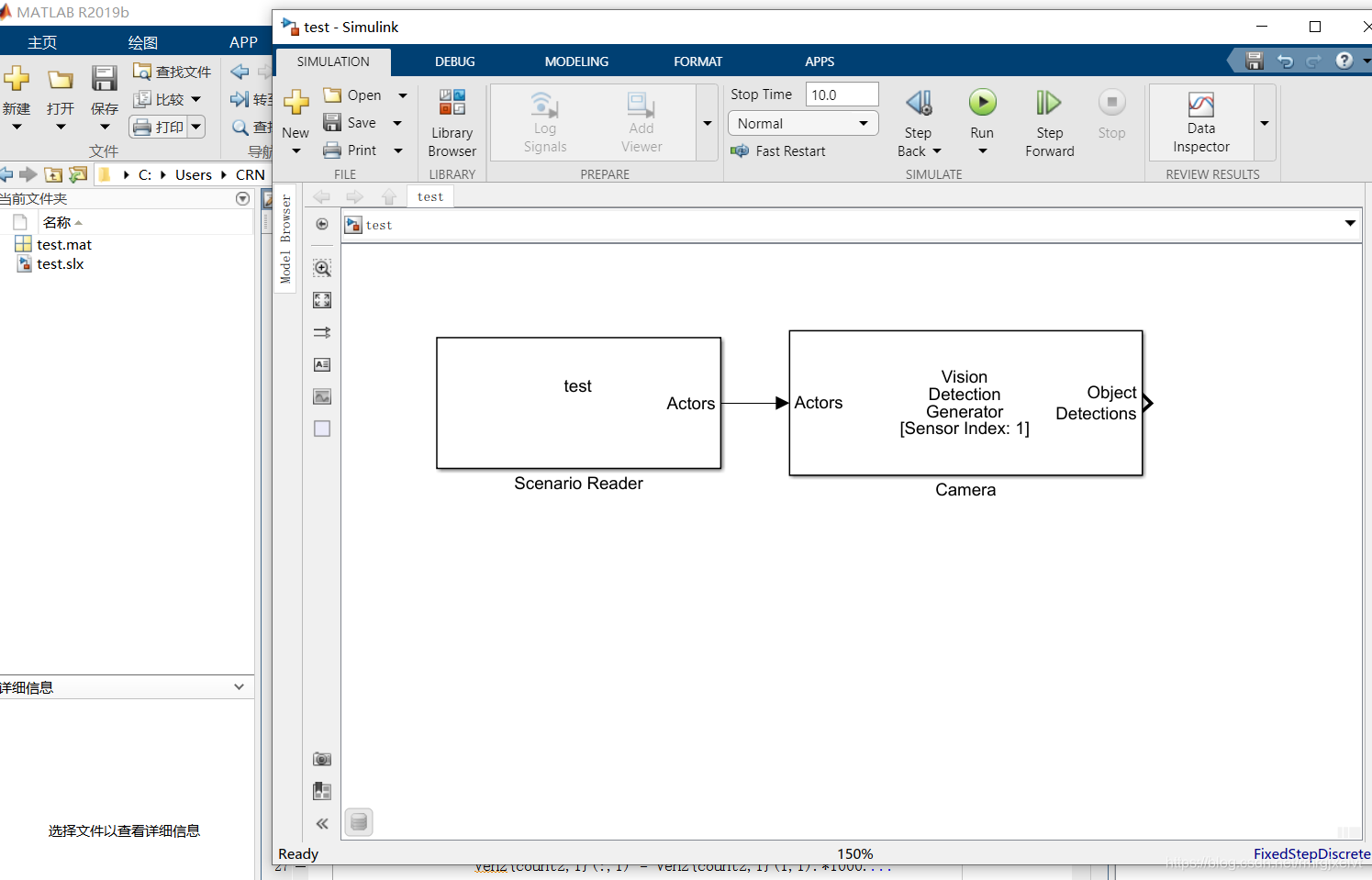
SCENARIO模块输出的车辆数据格式如下,可用Bus模块分解,也可作为结构体使用matlab function 解码
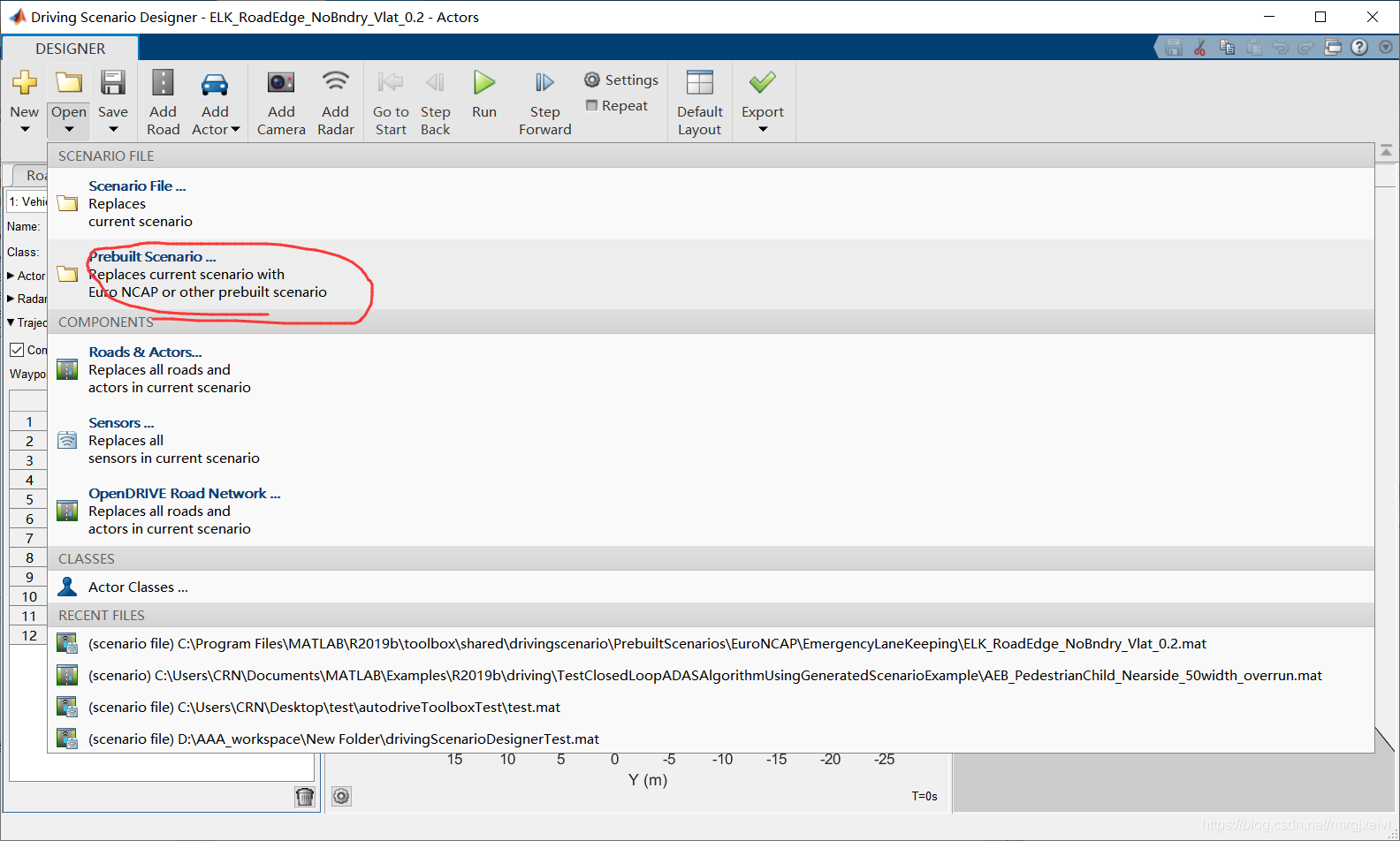
1.2 使用现有场景
如图所示,matlab附带众多标准化的试验场景
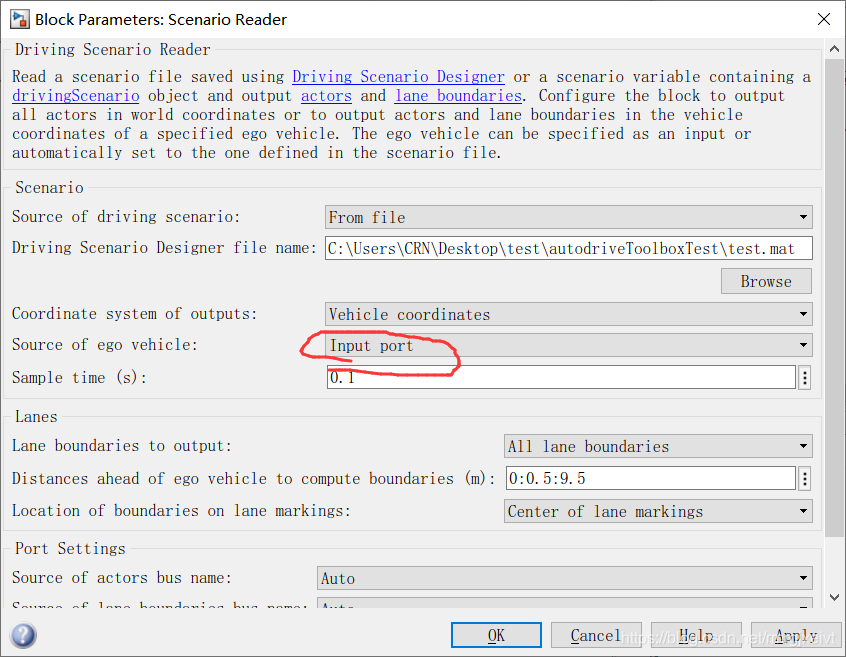
2. 闭环场景
与开环场景类似,
SIMULINK中设置如下
数据打包如下
function egoActor = packEgo(pos,vel,yaw,yawRate)
% Pack ego information into a single ego actor bus
%
% Imoprtant note:
% Output is a bus of type BusActorsActors. This is the same bus used by the
% Scenario Reader to output an individual actor. If you change the
% output bus name of Scenario Reader, change the output bus name here
% as well by clicking on 'Edit Data' in the menu above.
egoActor = struct(...
'ActorID',2,...
'Position', [pos(1) pos(2) 0], ...
'Velocity', [vel(1) vel(2) 0], ...
'Roll', 0, ...
'Pitch', 0, ...
'Yaw', yaw, ...
'AngularVelocity', [0 0 yawRate]);
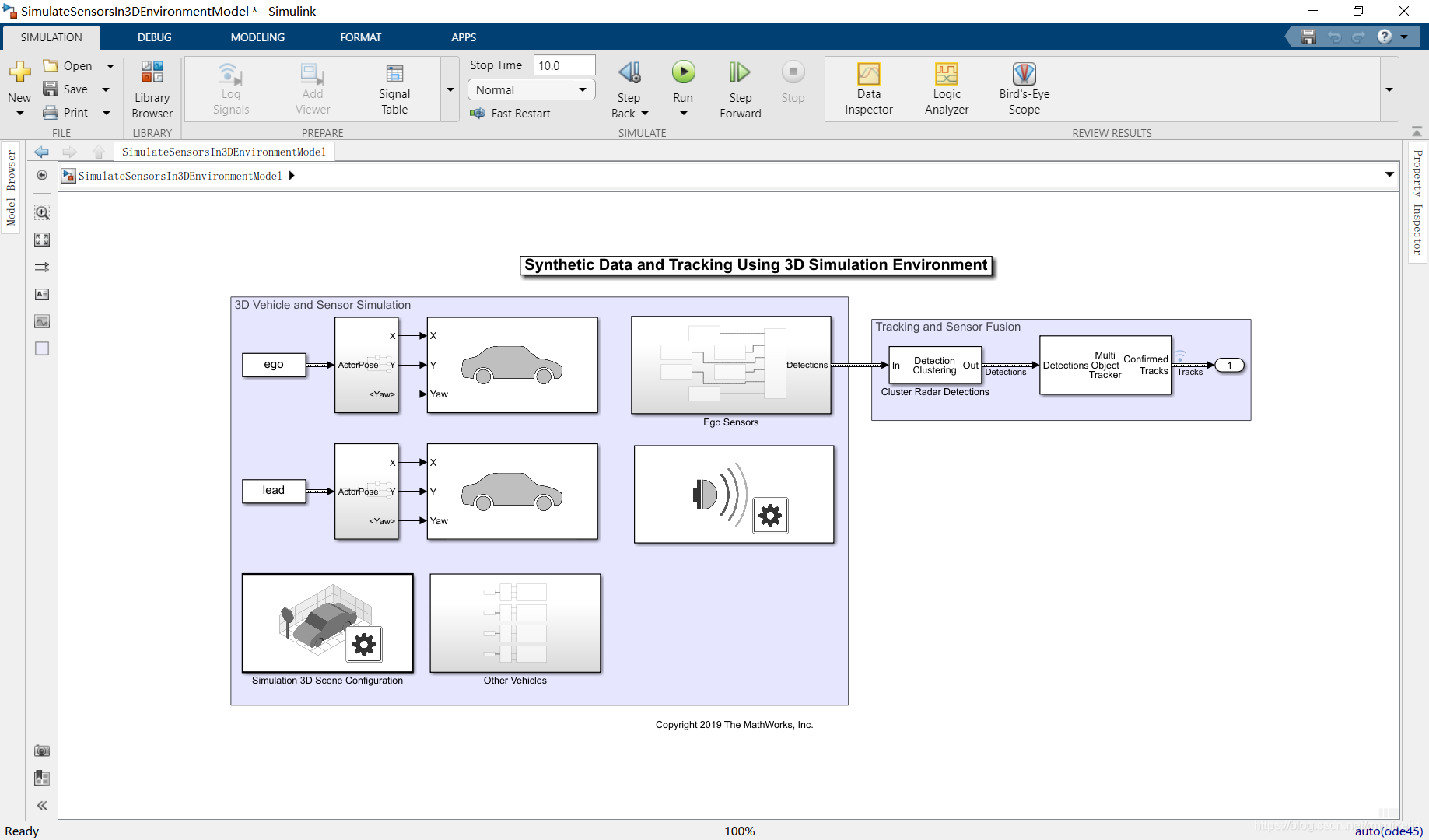
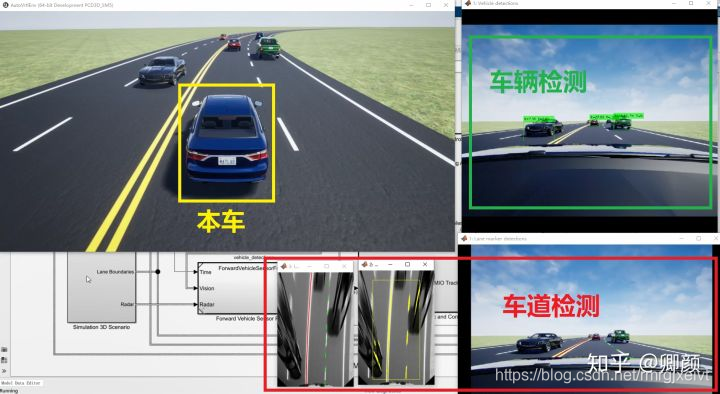
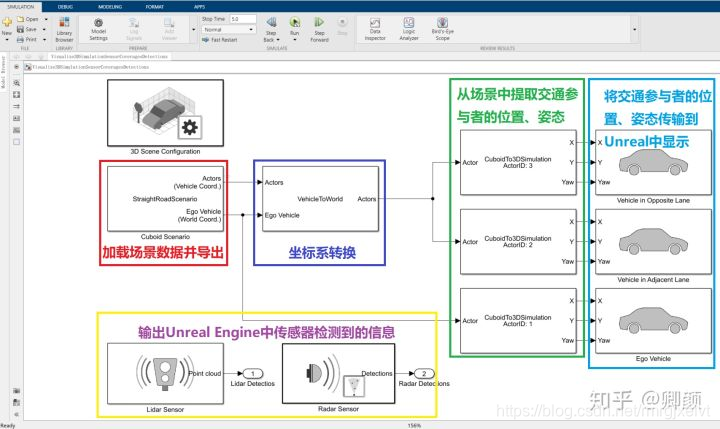
3.使用UNREAL 4引擎进行SCENARIO SIMULATION
参照MATLAB2019B中自带的例子

4.一些参考资料和附加说明
4.1 DRIVING SCENARIO DESIGNER
MATLAB/Simulink自动驾驶工具箱之Driving Scenario Designer
https://zhuanlan.zhihu.com/p/109939394
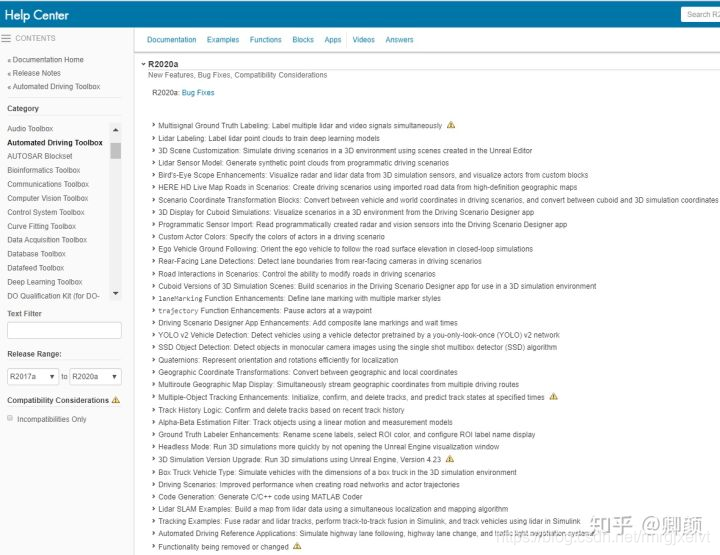
4.2 matlab2020的自动驾驶工具箱更新了什么
参考:MATLAB2020a自动驾驶工具箱有哪些新特性?
https://zhuanlan.zhihu.com/p/115166496
(1)增加了几个自动驾驶demo——高速公路车道跟随、高速公路车道变更和交通信号协同系统
(2)Ground Truth Labeler可以同时标注代表同一场景的多个信号
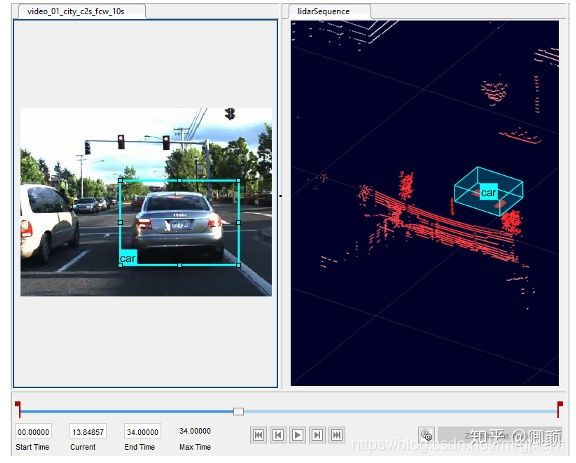
(3)增加了激光雷达传感器模型
(4)Driving Scenario Designer增加了3D显示

(5)提供了几个预构建场景,这几个预构建场景在仿真运行中打通了Driving Scenario Designer和Unreal Engine
这几个场景包括CurvedRoad、CurvedRoad、StraightRoad、USCityBlock、USHighway。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号