

【图形学笔记】Lecture12-Path Tracing-路径追踪
Lecture12-Path Tracing-路径追踪
- Lecture12-Path Tracing-路径追踪
路径追踪=光追+蒙特卡洛方法
Ray Casting 光线追踪
- 通过追踪每个像素的光线,生成图片
- 通过光线能否到光源,来检查是否是阴影
Ray-surface intersection 射线-表面判交
光线和一个几何体的交点怎么算?对于封闭的几何体,只需要判断交点个数的奇偶性!
所以转换成与三角形网格的交点!(这样会有点慢,后面会有加速结构)
光线和平面
光线方程:
平面方程(也写成向量的形式):\((p-p')\cdot N=0\)(过 \(p'\) 点,以 \(N\) 为法向量)
联立代入,\((o+td-p')\cdot N=0\),得到
先 check 必要条件 \(0\leq t<\infty\)
光线和三角形判交——Möller Trumbore算法
先做完上一步,接着判断交点是否在三角形内,
平面是二维流形,对于三角形 \(P_0,P_1,P_2\),可以把三角形内的点写成重心坐标的形式:
Möller Trumbore Algorithm:
整理一下:
这里其实就是Cramer法则(乘法对应的是混合积):
整理系数得到线性方程(左边的行向量其实每个元素都是列向量,所以本质上是 \(3\times 3\) 的矩阵):
左边的行列式认为是混合积 \([\vec D,\vec P_{10},\vec P_{20}]=D\cdot (\vec P_{10}\times \vec P_{20})\) 根据Cramer法则:
和下面写的一大坨式子是一样的,现场推就好了(刚好每项差一个负号,最后全消掉了):

然后检查 \(b_1,b_2,t\) 是否规范(\(\geq 0\))即可。
Ray Intersection With Sphere
球:\((p-c)^2=R^2\),代入\(r=o+td\),得到\((o+td-c)^2=R^2\),转化成
标准的二次方程。
Ray Intersection With Implicit Surface
光线和隐式曲面求交,即如果有\(f(\vec p)=0\),就代入得到 \(f(\vec o +t\vec d)=0\)。
Bounding Volumes——包围盒er
-
可以预先处理每个物体的包围盒,判断交点之前先和包围盒进行一次判断。
-
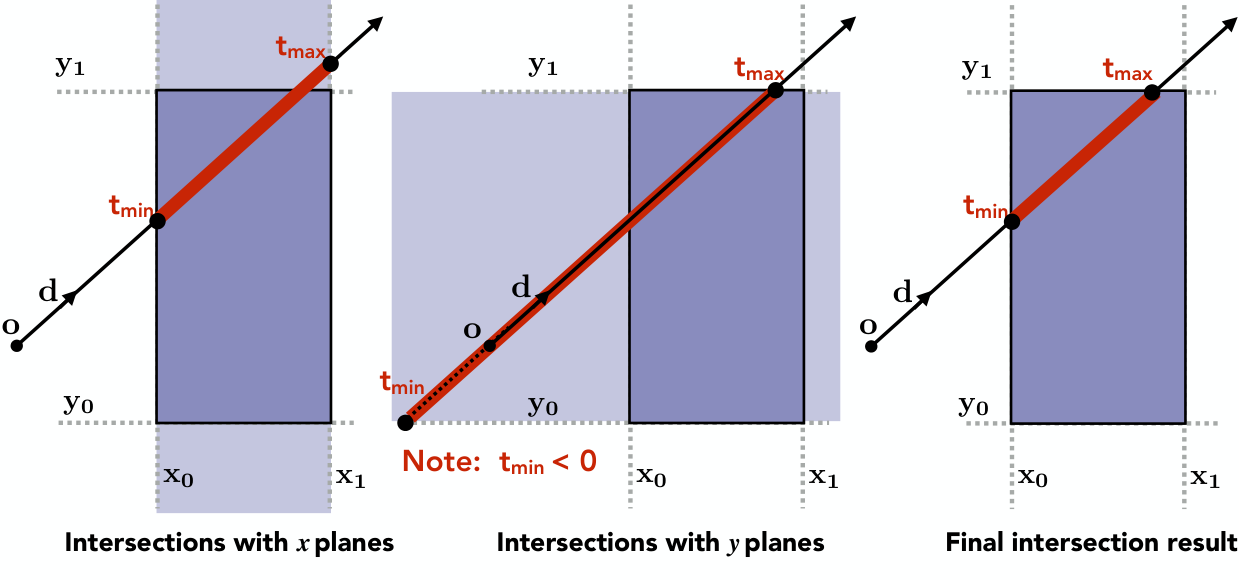
进一步可以考虑怎么做某一维(\(x,y,z\) 方向)的判断(axis-aligned bounding box——坐标轴平行、轴对齐的包围盒),算出每一组面的 \(t_{\min},t_\max\) 的区间,再求个交集(\(t_{enter} = \max{t_{\min}}, t_{exit} = \min{t_{\max}}\))
-
有交点当且仅当,\(t_{enter}< t_{exit}\) 且 \(t_{exit}\geq 0\).
-
AABB是个啥?坐标平行的包围盒(Axis-Aligned Bounding Box)
-
平行的平面求交会更好算: \(o_x +t d_x=p_x\),那么直接 \(t=\frac{p_x-o_x}{d_x}\),只需要简单的减法和除法。
Uniform Spatial Partitions-均匀的空间划分
- 1、光追之前,先做出包围盒
- 2、对包围盒进行划分,创建网格。
- 3、光线跟每个小盒子判交,如果有交点,再和内部的图形判断。
很明显,划分出来的格子数量不能太大,也不能太小,通常个数=某个常数 $\times $ 物体数量。
当然也有一些问题,比如它给了个“teapot in a stadium“,就是说一个很大的空间里,放了一个茶杯,那这种空间划分就很鸡肋。
Non-Uniform Spatial Partitions:Spatial Hierarchies-不均匀的空间划分
Oct-Tree 八叉树,KD-Tree,BSP-Tree空间划分树
KD-Tree
没什么好讲

按顺序遍历,光线求交。
Object Partition&Bounding Volume Hierarchy(BVH)物体划分-层次包围盒
KD树一个物体可能出现在多个节点里,而且对于一个固定的包围盒,判断一些图形是否在包围盒里,可能并不是很容易(比如三角形和立方体),所以就有了BVH的需要。
当然BVH也有个不好的地方,就是两个结点的包围盒可能是有交的。
如何划分空间?
- 比如 \(x,y,z\) 交替比较。
- 按照某一位排序,根据中位数划分,让左右两边的图形个数尽可能接近。
- 不管是KD树还是BVH,都是希望最小化期望的查询次数(毕竟用在光线追踪里面,光线是随机取的)

