

【图形学笔记】Lecture09-Mesh Representation &Geometry Processing-网格表示与几何处理
Lecture09-Mesh Representation &Geometry Processing-网格表示与几何处理
- Lecture09-Mesh Representation &Geometry Processing-网格表示与几何处理
Mesh Presentation网格表示
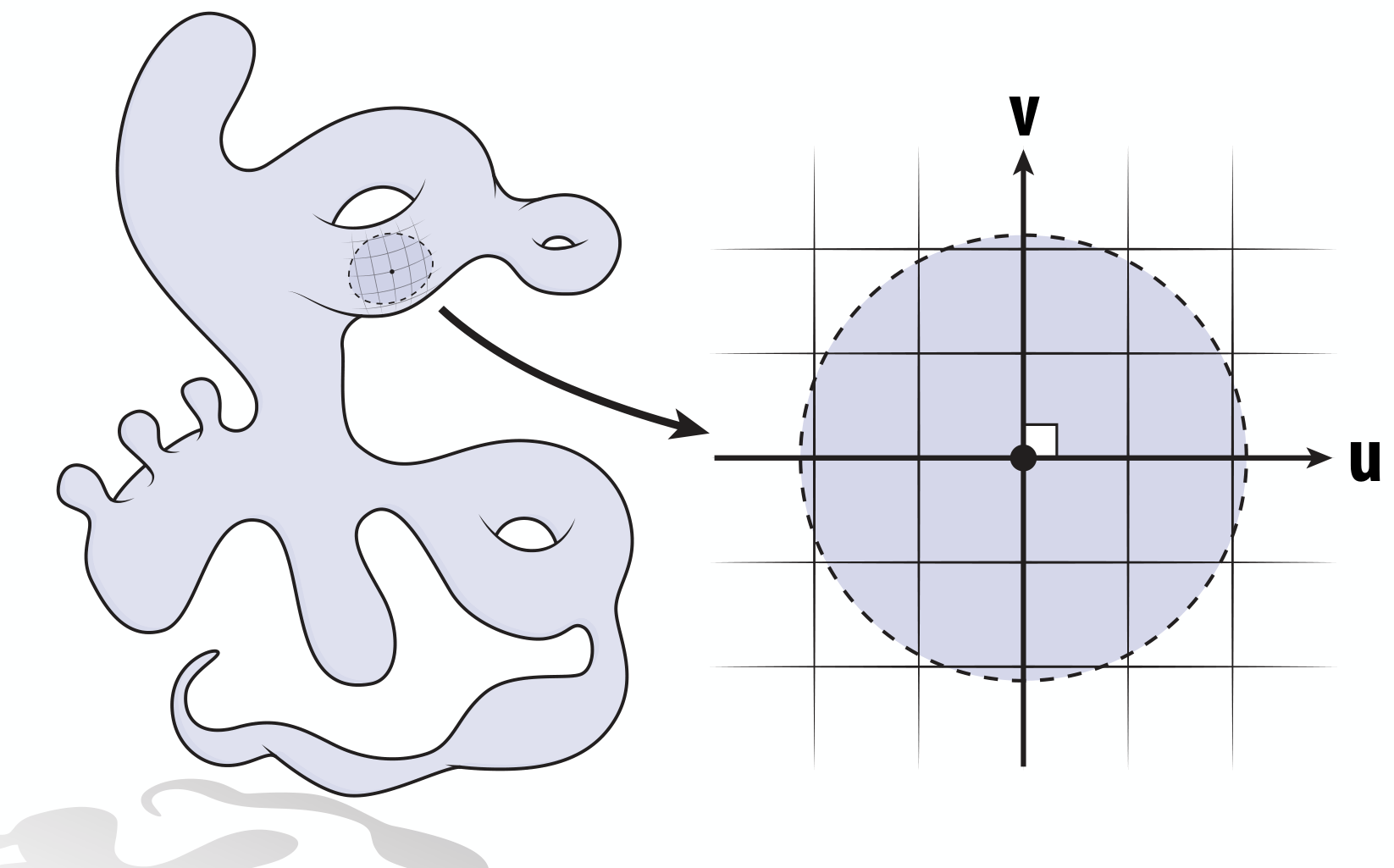
这种局部具有欧几里得性质的几何对象(严格地说:要每个点都存在一个和
- 位图(bitmap images):为了对图像进行编码,使用规则的像素网格,但是对于一些基本单元不是小方格的情况,效果可能不太好。
- so为什么要用规则的网格(regular grid)呢?——Regular grids make life easy!(??)
- 1、更简单高效,比如每个点的领域只有4个格子,标号和存储也非常方便。
- 2、基本上可以编码任何图像
- 但是规则的网格是位图最好的选择吗!!!
- 并不是!可能有些不太好的结果,比如各向异性,不能捕获边缘(它在说什么?)
Smooth Surfaces光滑曲面
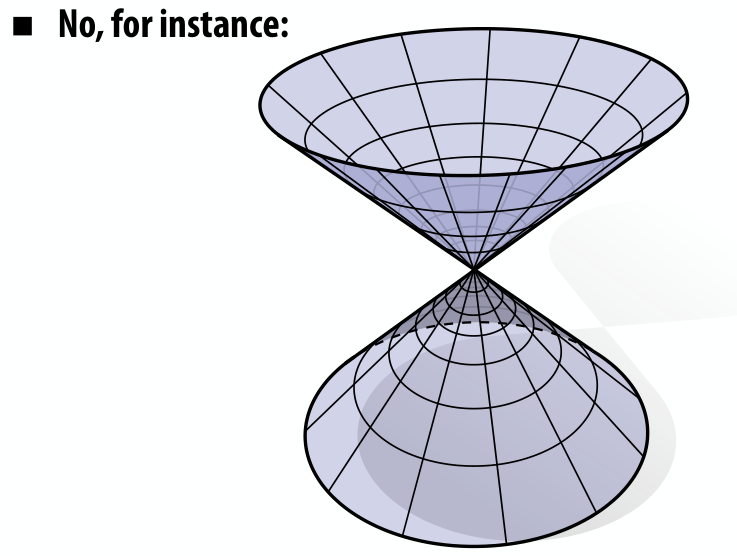
光滑曲面是流形,但并不是所有形状都是流形!比如下图中间那个点,不管怎么取领域都不会有欧式性质。
怎么判断简单多边形构成的图形是不是流形?有很简单的判断方式:
- 每条边只出现在两个多边形内,即不能有“鳞”(fins)
- 对每个顶点,包含它的多边形构成“扇形”(fans)
为什么流形这么重要呢?——可以保证数据结构和算法简单高效。
如何编码?数组、链表、块状链表(bushi)
Polygon soup-多边形汤
注:“汤”似乎是用来形容这种“无组织”的方式。
- 基本观点
- 每个三角形只存储三个点的坐标。
- 没有关于连通性的信息。
Adjacency List-邻接表
(你管这玩意叫邻接表?)
用一个矩阵存结点的坐标,比如:
然后紧接着的问题是,如何快速查找所有和某个点(比如2号点)相邻(有公共边)的点?
Incidence Matrix-关联矩阵
Q:如果要快速回答“领域查询”要怎么办呢?
A:简化邻接表的存储方式!就是再用一个关联矩阵来存放信息:
当然很明显这样会有资源浪费,只有
这样做的优缺点就很明显了,存储非常浪费,并且不太支持动态修改,但是查询是
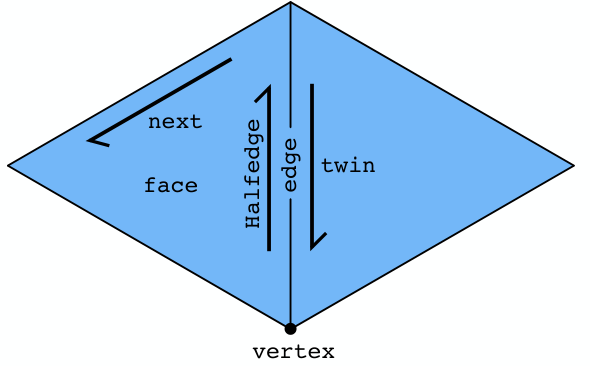
Half-Edge Data Structure(Linked-list-like)-半边数据结构(类似邻接表)
即,把一条边拆成两条边
-
存储邻域信息
-
*twin指向这条边对面的半边,*next表示下一条的半边,*edge,*face指向所在的边和面。
进一步,每个点、线、面的信息,其实也只需要存储“半边”——对于边来说,可以用twin访问,面的话可以一直跳next
struct Halfedge{ Halfedge* twin,* next; Vertex* vertex; Edge* edge; Face* face; }; struct Edge{ Halfedge* halfedge; }; struct Face{ Halfedge* halfedge; }; struct Vertex{ Point pt; Halfedge* halfedge; }; //它这里似乎认为一个“点”vertex,是
很明显,对于网格图,这种半边数据结构能够很方便遍历。
遍历一个面:
Halfedge* h = f->halfedge;// f: face do { process(h->vertex); h = h->next; } while( h != f->halfedge );
遍历一个点周围的边:
Halfedge* h = v->halfedge;// v: vertex do { process(h->edge); h = h->twin->next; } while( h != v->halfedge );
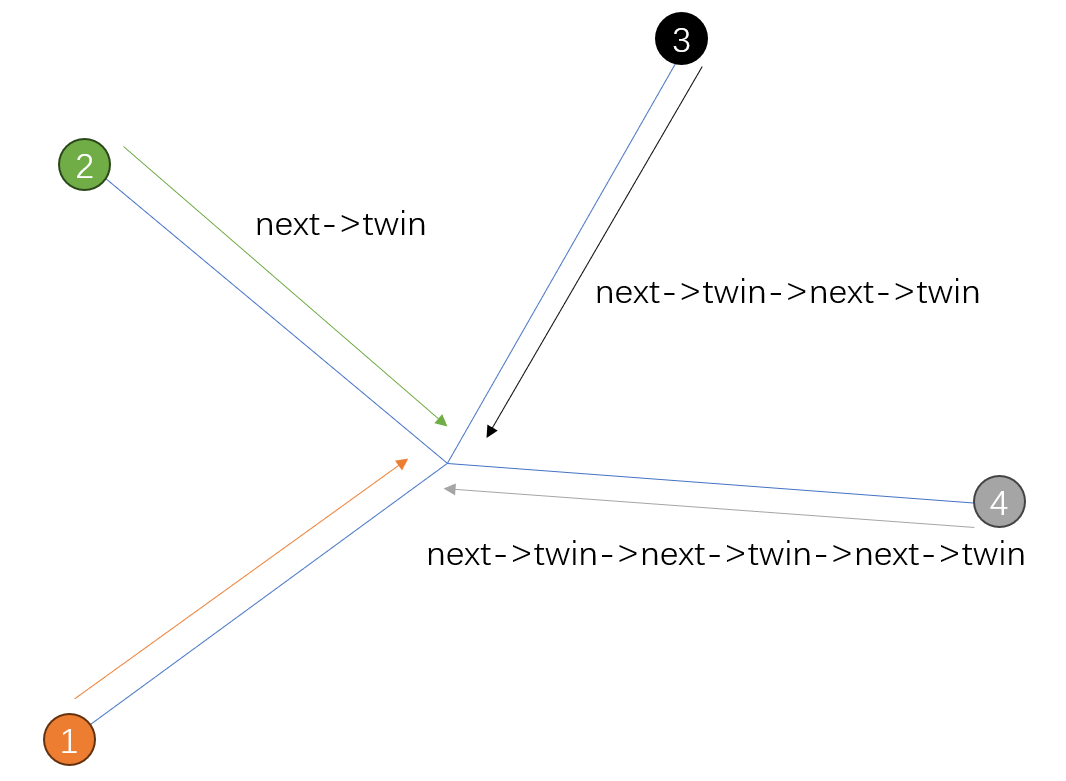
接着说,这种半边数据结构基本是“流形”,以及edge,face,vertex 的信息其实是可以隐藏起来的——真正要访问整个mesh,只需要*next,*twin两个信息:
- 沿着
next转一圈,得到整个face。 - 沿着
twin走,得到这条边。 - 沿着
next->twin,得到一圈的顶点。
Q:如何表示一些不是流形的图像?(好像没给回答)
Half-Edge meshes are easy to edit
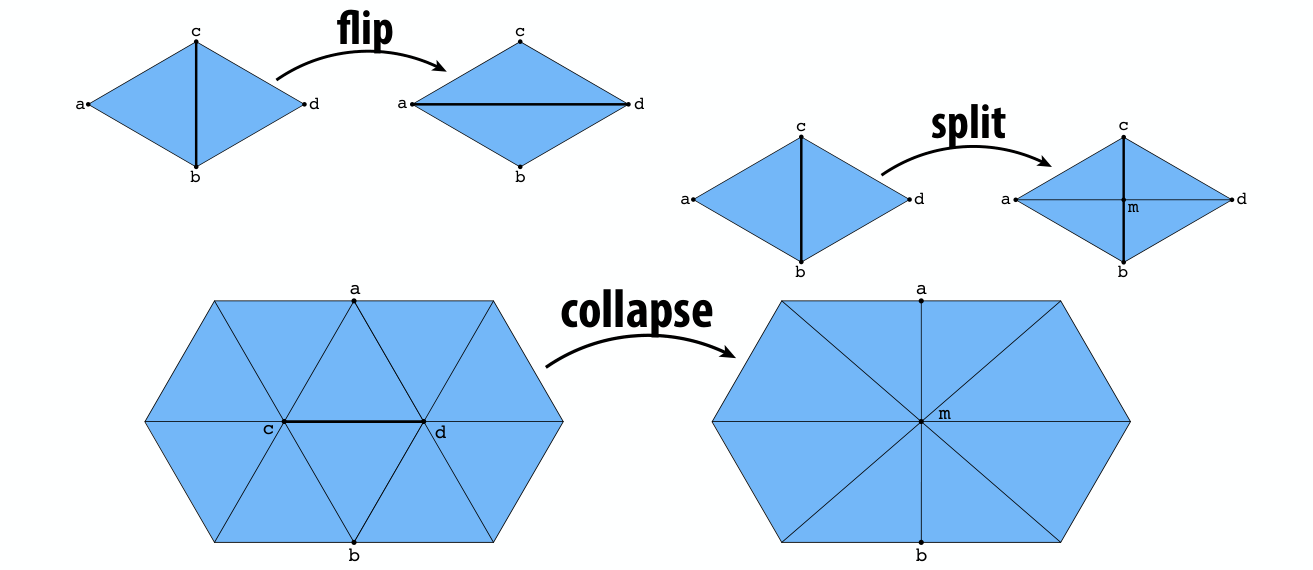
对于三角形网格,一些可能的原子/基本操作(atomic operation):翻转、分裂、坍缩
如何去分配(Allocate?)/删除一个元素,或者重新分配指针?需要非常小心地去保持流形的性质!!(这要你说?)
这三个操作课件也只是bb了一下有哪些操作,应该不需要在意具体细节:
Edge Flip(Triangles)边的翻转
Edge Split(Triangles)边的分裂
需要添加一个新的边
Edge Collapse(Triangles)边的坍缩
把
Geometry Processing 几何处理
扩展传统的数字信号处理(音频、视频等)以处理几何信号:
- 上采样/下采样/重采样/滤波…
- 混叠(?没懂这是啥,aliasing)
(然后这里开始说一些实际应用的场景了,应该不太重要)
-
重建:给一个几何图形的样本,重新构建表面;
- 这个样本可能是什么样的?有很多可能:点、点&法线、曲线密度积分…
- 如何得到表面,也有很多种技术:基于轮廓线、基于Voronoi图、还有PDE和Radon变换
-
上采样:通过插值提升分辨率!
- 对于图像(image):比如通过双线性,双三次插值(bilinear, bicubic interpolation)
- 多边形网格::细分(subdivision),双边上采样(bilateral upsampling)
-
下采样:降低分辨率,并且最好能保持形状。
- 对于图像:最近邻域/双线性/双三次插值
- 点云:二次采样(subsampling)——取更少的点
- 多边形网格:迭代抽取、形状近似
-
重采样:修改采样点的分布,以提升质量。
- 多边形网格:保持多边形非常重要!不同的任务有不同的“质量”的概念…
- 比如:可视化/解方程(可能对于质量的需求就不一样?)
-
滤波:去除噪声、或者突出图像的重点特征
- 图像:模糊化、双边滤波器(?)、边缘探测
- 多边形网格:曲率流(?)、双边滤波器、分光滤波器
-
压缩:通过去除冗余信息(或者几乎不重要的信息),减少存储的大小
- 图像:1、哈夫曼编码、运行长度(run-length不懂咋翻译)——无损的!2、余弦/小波(JPEG/MPEG)——有损的
- 几何网格:压缩与连通性(?),有很多技术
-
形状分析:识别/理解重要的语义特征
- 图像:计算机视觉…
- 多边形网格:分割、对应、对称检测
Geometry ProcessingTasks: 3 Examples
细分、简化、标准化
Subdivision Surfaces 细分曲面
-
从一个粗糙的多边形网格开始:细分每个元素,再通过局部平均,更新顶点。
-
很多可能的规则:Catmull-Clark (四边形)、Loop (三角形)
-
共同的问题:插值还是近似?在顶点处连续?(保持连续性很难的啦!)
Loop Subdivision 循环细分
关于这个算法更多的细节:https://blog.csdn.net/McQueen_LT/article/details/106136324
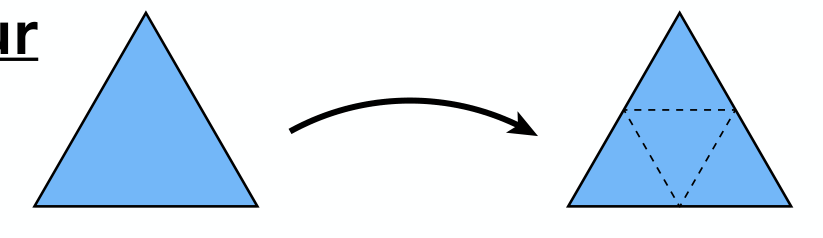
大体思路是把每个三角形分成四个,按照权重分配新的点,那么通常有一边上的新点,被两个面所共享,所以就有了Loop细分的规则:按照

那么对于老的(old)顶点呢? 设这个顶点度数是
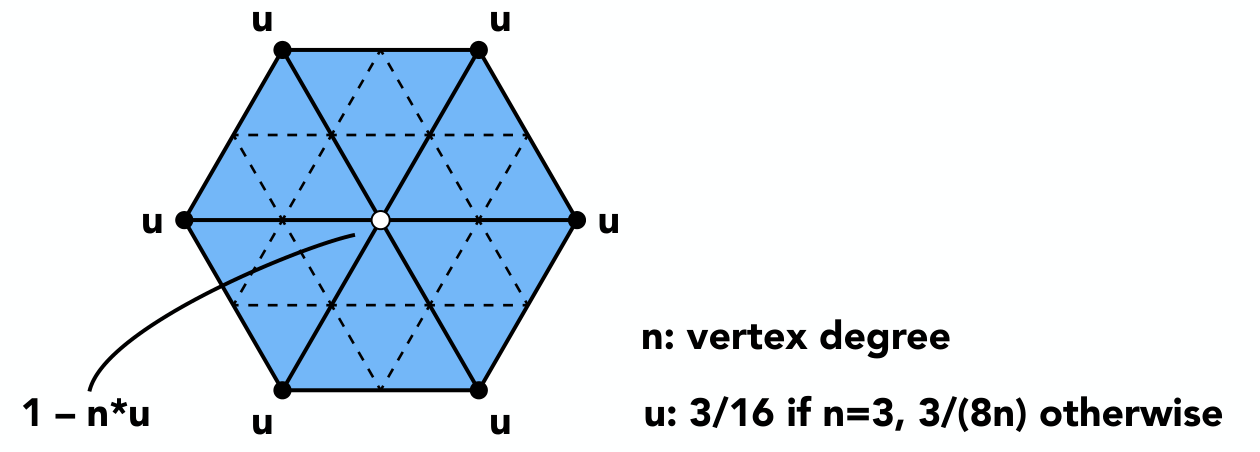
(“为什么叫Loop细分啊?“”Loop是人名“”草w“)
Catmull-Clark Subdivision (Regular Quad Mesh-普通四边形网格)
参考资料:https://en.wikipedia.org/wiki/Catmull–Clark_subdivision_surface
(Catmull是2019年图灵奖得主之一)
Loop细分只能解决三角形网格的细分,对于一般情况用Catmull-Clark细分
(注:课件上的图片总让人感觉看着像一个平面…看着让人误以为边点在边上…其实应该是空间里的图形,边点也不一定在边上)
- 面点(face point):每个面顶点的平均值
- 边点(edge point):一条边连接的两个面的面点
- 中点(midpoint):就是正常的中点,这里就是在强调midpoint和edge point不是同一个东西
- 原式顶点点(old "vertex" point):字面意思
对于每个原式顶点点
好了,然后看课件发现,咦我边点怎么没用的样子?
好像课件确实没提,因为步骤其实是这样:
- 1、求出面点、边点、新的顶点坐标。
- 2、每个面的面点连接边点,每个(新的)顶点再向对应的边点连边
- 如下图(蓝色是面点,粉色是边点,绿色是新点):

然后再回过头看课件,对于最简单的四边形网格(Regular Quad Mesh),每次做Catmull-Clark细分就只是给网格多划了几刀。然后对于一个一般的例子:
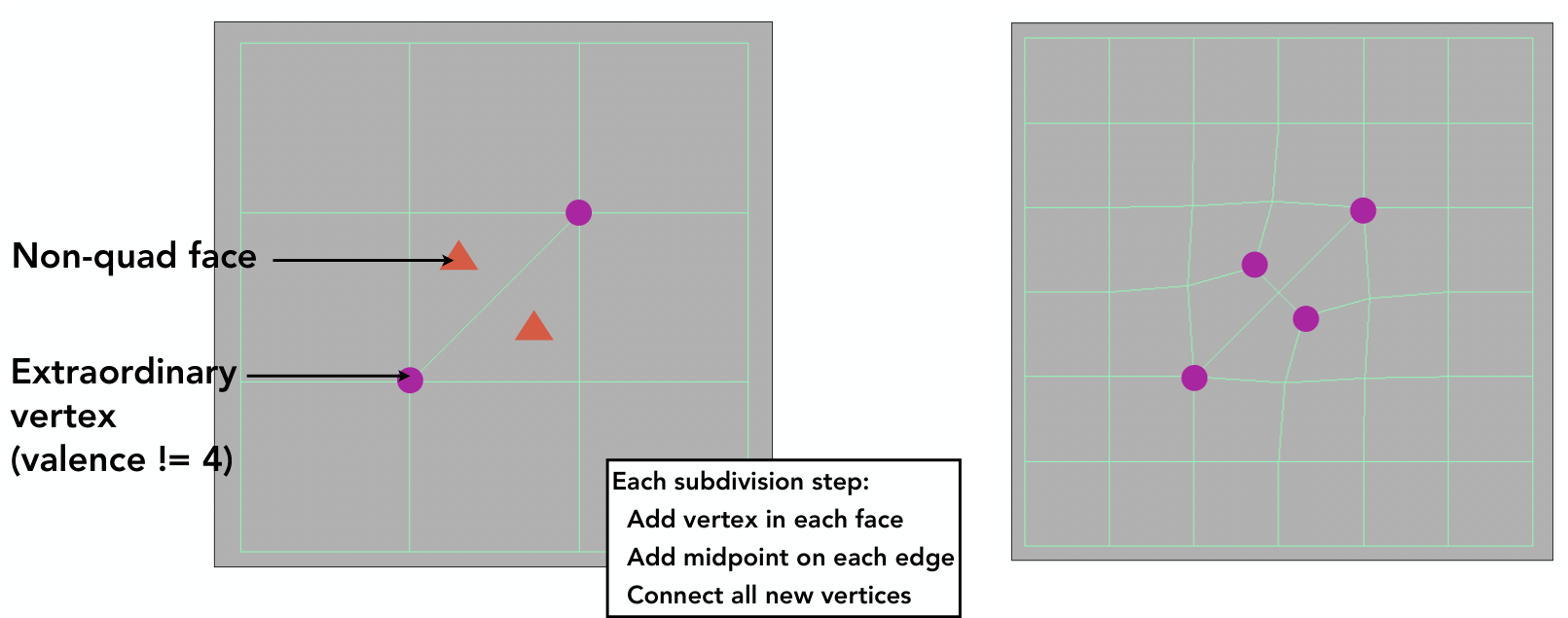
这里是8个正方形,以及2个三角形。
新加入的橙色三角形就是面点,然后在边上取中点(感觉应该是边点?)连接,以及新的结点照样计算,就连出来右边的效果。
-
Q:为什么细分之后,其他正方形也歪了?
-
A:想想很正常,
-
Q:细分之后有多少奇异点?(extraordinary vertices)他们的价是多少?有多少非四边形的面?
-
A:首先非四边形的面细分之后是没了(因为我们的连接方式连完之后都是四边形,除非有退化的情况?),而奇异点的个数不会变少,而每次细分后,奇异点增加的个数=细分前非四边形的面数,是不是和平面图转对偶图有异曲同工之妙。
后面提了一嘴,Catmull-Clark算法在三角形上跑的效果似乎不太好,有很多不规范的点,然后也有锯齿。
网格简化
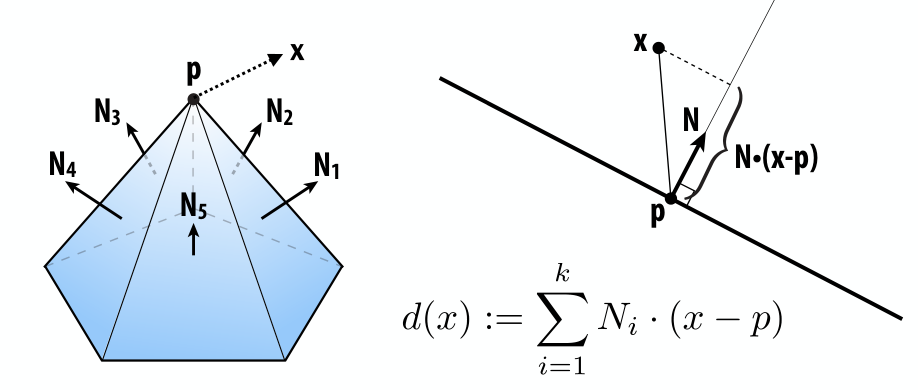
需要去决定修改(坍缩)哪些边,进一步考虑去分析:坍缩一条边之后,会有多少几何误差?二次误差度量(quadirc error matric)!
- 对每条边,考虑:假设坍缩这条边,得到的图形,所能得到的最小误差(坍缩之后得到一个点,这个点到其他面的距离平方)是多少?每次贪心地选择误差最小的;同时坍缩掉一条边之后,会影响一些已经存在的边,所以还要去更新一些边的答案,所以说要用优先队列维护。
- 注意:这里的贪心并不保证全局最优,只不过是根据经验来说比较优…
- 然后这里课件上用的”二次度量误差“其实也不是严格的距离,而是说假设坍缩之后的点从
Mesh Regularization 网格正规化
怎样的三角形算“好的”:希望内角不要太大或者太小。
更具体的情况——Delaunay空外接圆条件(没错就是前苏联的那个Delaunay):三角形圆外接圆内不包含其他顶点!
(补充:Delaunay三角剖分里,其实还有个最小角最大的条件,课件上没提)
一些其他“好的”网格的条件:顶点度数正规——最好度数是6(等边三角形的内角)
Isotropic Remeshing 各向同性网格重建
参考:https://blog.csdn.net/qq_32146369/article/details/105717778
希望让三角形在形状和大小上一致。
-
如何增加度数?把边翻转!理论上需要如果有一些点比6小,一些比6大,而实际上,遍历每条边,效果挺好的
-
如何让三角形更圆?通过顶点的中心来改善形状——考虑顶点在表面上/表面外的移动。
算法
- 1、超过
- 2、小于
- 3、翻转边,调整度数。
- 4、调整中心点。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· Docker 太简单,K8s 太复杂?w7panel 让容器管理更轻松!