
IIC
1.IIC协议
I2C1_SCL使用的是UART4_TXD,复用为ALT2
I2C1_SDA使用的是UART4_RXD,复用为ALT2
注意:
SCL和SDA必须要上拉电阻接到VCC,选择4.7K,因为总线空闲时,两根线必须为高电平
IIC总线支持多从机,通过从机地址来进行通信
起始位
为高电平的时候,SDA跳变到低电平
停止位
SCL 为高电平,SDA上升沿
数据传输
在数据传输过程中,为了防止数据变化,当SCL为低电平时允许数据变化,高电平的时候数据必须保持稳定
应答信号
应答信号是从机发出的,主机需要提供应答信号所需时钟
IIC写时序


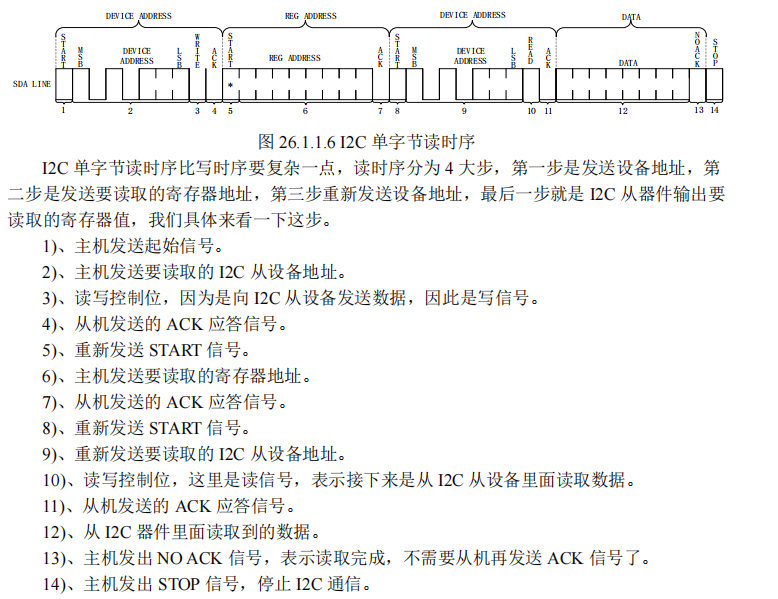
IIC读时序
2.代码
i2c.h
#ifndef __BSP_I2C_H
#define __BSP_I2C_H
#include "imx6ul.h"
/* 定义相关宏 */
/* 相关宏定义 */
#define I2C_STATUS_OK (0)
#define I2C_STATUS_BUSY (1)
#define I2C_STATUS_IDLE (2)
#define I2C_STATUS_NAK (3)
#define I2C_STATUS_ARBITRATIONLOST (4) /* 仲裁丢失 */
#define I2C_STATUS_TIMEOUT (5)
#define I2C_STATUS_ADDRNAK (6)
/*
* I2C方向枚举类型
*/
enum i2c_direction
{
kI2C_Write = 0x0, /* 主机向从机写数据 */
kI2C_Read = 0x1, /* 主机从从机读数据 */
} ;
/*
* 主机传输结构体
*/
struct i2c_transfer
{
unsigned char slaveAddress; /* 7位从机地址 */
enum i2c_direction direction; /* 传输方向 */
unsigned int subaddress; /* 寄存器地址 */
unsigned char subaddressSize; /* 寄存器地址长度 */
unsigned char *volatile data; /* 数据缓冲区 */
volatile unsigned int dataSize; /* 数据缓冲区长度 */
};
/*
*函数声明
*/
void i2c_init(I2C_Type *base);
unsigned char i2c_master_start(I2C_Type *base, unsigned char address, enum i2c_direction direction);
unsigned char i2c_master_repeated_start(I2C_Type *base, unsigned char address, enum i2c_direction direction);
unsigned char i2c_check_and_clear_error(I2C_Type *base, unsigned int status);
unsigned char i2c_master_stop(I2C_Type *base);
void i2c_master_write(I2C_Type *base, const unsigned char *buf, unsigned int size);
void i2c_master_read(I2C_Type *base, unsigned char *buf, unsigned int size);
unsigned char i2c_master_transfer(I2C_Type *base, struct i2c_transfer *xfer);
#endif // !__BSP_I2C_H
i2c.c
#include "bsp_i2c.h"
#include "bsp_delay.h"
#include "stdio.h"
/*
* @description : 初始化I2C,波特率100KHZ
* @param - base : 要初始化的IIC设置
* @return : 无
*/
void i2c_init(I2C_Type *base)
{
/* 1、配置I2C */
base->I2CR &= ~(1 << 7); /* 要访问I2C的寄存器,首先需要先关闭I2C */
/* 设置波特率为100K
* I2C的时钟源来源于IPG_CLK_ROOT=66Mhz
* IC2 时钟 = PERCLK_ROOT/dividison(IFDR寄存器)
* 设置寄存器IFDR,IFDR寄存器参考IMX6UL参考手册P1260页,表29-3,
* 根据表29-3里面的值,挑选出一个还是的分频数,比如本例程我们
* 设置I2C的波特率为100K, 因此当分频值=66000000/100000=660.
* 在表29-3里面查找,没有660这个值,但是有640,因此就用640,
* 即寄存器IFDR的IC位设置为0X15
*/
base->IFDR = 0X15 << 0;
/*
* 设置寄存器I2CR,开启I2C
* bit[7] : 1 使能I2C,I2CR寄存器其他位其作用之前,此位必须最先置1
*/
base->I2CR |= (1<<7);
}
/*
* @description : 发送重新开始信号
* @param - base : 要使用的IIC
* @param - addrss : 设备地址
* @param - direction : 方向
* @return : 0 正常 其他值 出错
*/
unsigned char i2c_master_repeated_start(I2C_Type *base, unsigned char address, enum i2c_direction direction)
{
/* I2C忙并且工作在从模式,跳出 */
if(base->I2SR & (1 << 5) && (((base->I2CR) & (1 << 5)) == 0))
return 1;
/*
* 设置寄存器I2CR
* bit[4]: 1 发送
* bit[2]: 1 产生重新开始信号,必须需要总线空闲的时候才可以
*/
/* 这里可以设置成主机模式,但是前面判断它工作再从模式就跳出啦,所以没有必要啦 */
base->I2CR |= (1 << 4) | (1 << 2);
/*
* 设置寄存器I2DR
* bit[7:0] : 要发送的数据,这里写入从设备地址
* 参考资料:IMX6UL参考手册P1249
*/
base->I2DR = ((unsigned int)address << 1) | ((direction == kI2C_Read)? 1 : 0);
return 0;
}
/*
* @description : 发送开始信号
* @param - base : 要使用的IIC
* @param - addrss : 设备地址
* @param - direction : 方向
* @return : 0 正常 其他值 出错
*/
unsigned char i2c_master_start(I2C_Type *base, unsigned char address, enum i2c_direction direction)
{
if(base->I2SR & (1 << 5)) /* I2C忙 */
return 1;
/*
* 设置寄存器I2CR
* bit[5]: 1 主模式
* bit[4]: 1 发送
*/
base->I2CR |= (1 << 5) | (1 << 4);
/*
* 设置寄存器I2DR
* bit[7:0] : 要发送的数据,这里写入从设备地址
* 参考资料:IMX6UL参考手册P1249
*/
base->I2DR = ((unsigned int)address << 1) | ((direction == kI2C_Read)? 1 : 0);
return 0;
}
/*
* @description : 检查并清除错误
* @param - base : 要使用的IIC
* @param - status : 状态
* @return : 状态结果
*/
unsigned char i2c_check_and_clear_error(I2C_Type *base, unsigned int status)
{
/* 检查是否发生仲裁丢失错误 */
if(status & (1<<4))
{
base->I2SR &= ~(1<<4); /* 清除仲裁丢失错误位 */
base->I2CR &= ~(1 << 7); /* 先关闭I2C */
base->I2CR |= (1 << 7); /* 重新打开I2C */
return I2C_STATUS_ARBITRATIONLOST;
}
else if(status & (1 << 0)) /* 没有接收到从机的应答信号 */
{
return I2C_STATUS_NAK; /* 返回NAK(No acknowledge) */
}
return I2C_STATUS_OK;
}
/*
* @description : 停止信号
* @param - base : 要使用的IIC
* @param : 无
* @return : 状态结果
*/
unsigned char i2c_master_stop(I2C_Type *base)
{
unsigned short timeout = 0xffff;
/*
* 清除I2CR的bit[5:3]这三位
*/
base->I2CR &= ~((1 << 5) | (1 << 4) | (1 << 3));
/* 等待忙结束 */
while((base->I2SR & (1 << 5)))
{
timeout--;
if(timeout == 0) /* 超时跳出 */
return I2C_STATUS_TIMEOUT;
}
return I2C_STATUS_OK;
}
/*
* @description : 发送数据
* @param - base : 要使用的IIC
* @param - buf : 要发送的数据
* @param - size : 要发送的数据大小
* @param - flags : 标志
* @return : 无
*/
void i2c_master_write(I2C_Type *base, const unsigned char *buf, unsigned int size)
{
/* 等待传输完成 */
while(!(base->I2SR & (1 << 7)));
base->I2SR &= ~(1 << 1); /* 清除标志位 */
base->I2CR |= 1 << 4; /* 发送数据 */
while(size--)
{
base->I2DR = *buf++; /* 将buf中的数据写入到I2DR寄存器 */
while(!(base->I2SR & (1 << 1))); /* 等待传输完成 */
base->I2SR &= ~(1 << 1); /* 清除标志位 */
/* 检查ACK */
if(i2c_check_and_clear_error(base, base->I2SR))
break;
}
base->I2SR &= ~(1 << 1);
i2c_master_stop(base); /* 发送停止信号 */
}
/*
* @description : 读取数据
* @param - base : 要使用的IIC
* @param - buf : 读取到数据
* @param - size : 要读取的数据大小
* @return : 无
*/
void i2c_master_read(I2C_Type *base, unsigned char *buf, unsigned int size)
{
volatile uint8_t dummy = 0;
dummy++; /* 防止编译报错 */
/* 等待传输完成 */
while(!(base->I2SR & (1 << 7)));
base->I2SR &= ~(1 << 1); /* 清除中断挂起位 */
base->I2CR &= ~((1 << 4) | (1 << 3)); /* 接收数据 */
/* 如果只接收一个字节数据的话发送NACK信号 */
if(size == 1)
base->I2CR |= (1 << 3);
dummy = base->I2DR; /* 假读 */
while(size--)
{
while(!(base->I2SR & (1 << 1))); /* 等待传输完成 */
base->I2SR &= ~(1 << 1); /* 清除标志位 */
if(size == 0)
{
i2c_master_stop(base); /* 发送停止信号 */
}
if(size == 1)
{
base->I2CR |= (1 << 3);
}
*buf++ = base->I2DR;
}
}
/*
* @description : I2C数据传输,包括读和写
* @param - base: 要使用的IIC
* @param - xfer: 传输结构体
* @return : 传输结果,0 成功,其他值 失败;
*/
unsigned char i2c_master_transfer(I2C_Type *base, struct i2c_transfer *xfer)
{
unsigned char ret = 0;
enum i2c_direction direction = xfer->direction;
base->I2SR &= ~((1 << 1) | (1 << 4)); /* 清除标志位 */
/* 等待传输完成 */
while(!((base->I2SR >> 7) & 0X1)){};
/* 如果是读的话,要先发送寄存器地址,所以要先将方向改为写 */
if ((xfer->subaddressSize > 0) && (xfer->direction == kI2C_Read))
{
direction = kI2C_Write;
}
ret = i2c_master_start(base, xfer->slaveAddress, direction); /* 发送开始信号 */
if(ret)
{
return ret;
}
while(!(base->I2SR & (1 << 1))){}; /* 等待传输完成 */
ret = i2c_check_and_clear_error(base, base->I2SR); /* 检查是否出现传输错误 */
if(ret)
{
i2c_master_stop(base); /* 发送出错,发送停止信号 */
return ret;
}
/* 发送寄存器地址 */
if(xfer->subaddressSize)
{
do
{
base->I2SR &= ~(1 << 1); /* 清除标志位 */
xfer->subaddressSize--; /* 地址长度减一 */
base->I2DR = ((xfer->subaddress) >> (8 * xfer->subaddressSize)); //向I2DR寄存器写入子地址
while(!(base->I2SR & (1 << 1))); /* 等待传输完成 */
/* 检查是否有错误发生 */
ret = i2c_check_and_clear_error(base, base->I2SR);
if(ret)
{
i2c_master_stop(base); /* 发送停止信号 */
return ret;
}
} while ((xfer->subaddressSize > 0) && (ret == I2C_STATUS_OK));
if(xfer->direction == kI2C_Read) /* 读取数据 */
{
base->I2SR &= ~(1 << 1); /* 清除中断挂起位 */
i2c_master_repeated_start(base, xfer->slaveAddress, kI2C_Read); /* 发送重复开始信号和从机地址 */
while(!(base->I2SR & (1 << 1))){};/* 等待传输完成 */
/* 检查是否有错误发生 */
ret = i2c_check_and_clear_error(base, base->I2SR);
if(ret)
{
ret = I2C_STATUS_ADDRNAK;
i2c_master_stop(base); /* 发送停止信号 */
return ret;
}
}
}
/* 发送数据 */
if ((xfer->direction == kI2C_Write) && (xfer->dataSize > 0))
{
i2c_master_write(base, xfer->data, xfer->dataSize);
}
/* 读取数据 */
if ((xfer->direction == kI2C_Read) && (xfer->dataSize > 0))
{
i2c_master_read(base, xfer->data, xfer->dataSize);
}
return 0;
}
main
#include "bsp_clk.h"
#include "bsp_delay.h"
#include "bsp_led.h"
#include "bsp_beep.h"
#include "bsp_key.h"
#include "bsp_int.h"
#include "bsp_uart.h"
#include "stdio.h"
#include "bsp_lcd.h"
#include "bsp_lcdapi.h"
#include "bsp_rtc.h"
#include "bsp_ap3216c.h"
/* 背景颜色索引 */
unsigned int backcolor[10] = {
LCD_BLUE, LCD_GREEN, LCD_RED, LCD_CYAN, LCD_YELLOW,
LCD_LIGHTBLUE, LCD_DARKBLUE, LCD_WHITE, LCD_BLACK, LCD_ORANGE
};
/*
* @description : main函数
* @param : 无
* @return : 无
*/
int main(void)
{
unsigned short ir, als, ps;
unsigned char state = OFF;
int_init(); /* 初始化中断(一定要最先调用!) */
clk_init(); /* 初始化系统时钟 */
delay_init(); /* 初始化延时 */
clk_enable(); /* 使能所有的时钟 */
led_init(); /* 初始化led */
beep_init(); /* 初始化beep */
uart_init(); /* 初始化串口,波特率115200 */
lcd_init(); /* 初始化LCD */
rtc_init(); /* rtc初始化 */
tftlcd_dev.forecolor = LCD_RED;
lcd_show_string(30, 50, 200, 16, 16, (char*)"ZERO-IMX6U IIC TEST");
lcd_show_string(30, 70, 200, 16, 16, (char*)"AP3216C TEST");
lcd_show_string(30, 90, 200, 16, 16, (char*)"ATOM@ALIENTEK");
lcd_show_string(30, 110, 200, 16, 16, (char*)"2019/3/26");
while(ap3216c_init()) /* 检测不到AP3216C */
{
lcd_show_string(30, 130, 200, 16, 16, (char*)"AP3216C Check Failed!");
delayms(500);
lcd_show_string(30, 130, 200, 16, 16, (char*)"Please Check! ");
delayms(500);
}
lcd_show_string(30, 130, 200, 16, 16, (char*)"AP3216C Ready!");
lcd_show_string(30, 160, 200, 16, 16, (char*)" IR:");
lcd_show_string(30, 180, 200, 16, 16, (char*)" PS:");
lcd_show_string(30, 200, 200, 16, 16, (char*)"ALS:");
tftlcd_dev.forecolor = LCD_BLUE;
while(1)
{
a
lcd_shownum(30 + 32, 160, ir, 5, 16); /* 显示IR数据 */
lcd_shownum(30 + 32, 180, ps, 5, 16); /* 显示PS数据 */
lcd_shownum(30 + 32, 200, als, 5, 16); /* 显示ALS数据 */
delayms(120);
state = !state;
led_switch(LED0,state);
}
return 0;
}
主要是给自己看的,所以肯定会出现很多错误哈哈哈哈哈


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律