deformable conv
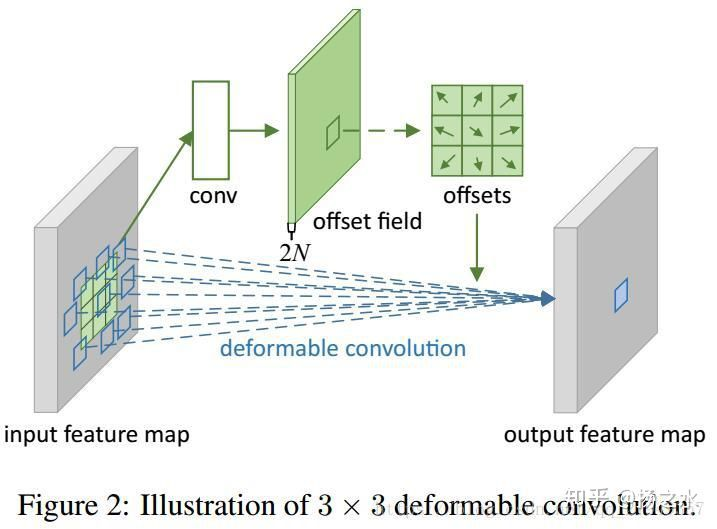
在原feature map上经过卷积生成与原feature map一样w、h大小的feature map,但是channel变为2倍,即2N。2N代表的是每个像素x、y两个方向的偏移量。
这个偏移量生成的坐标大概率是float型的,但像素或者feature map只有在整数位置才有值。所以找最近的4个整数位置的像素点进行双线性插值获得当前位置的值(这个与roi-align类似,都是通过对x、y取整和取整+1就能获得最近的4个坐标点)


在原feature map上经过卷积生成与原feature map一样w、h大小的feature map,但是channel变为2倍,即2N。2N代表的是每个像素x、y两个方向的偏移量。
这个偏移量生成的坐标大概率是float型的,但像素或者feature map只有在整数位置才有值。所以找最近的4个整数位置的像素点进行双线性插值获得当前位置的值(这个与roi-align类似,都是通过对x、y取整和取整+1就能获得最近的4个坐标点)


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义
· 地球OL攻略 —— 某应届生求职总结
· 提示词工程——AI应用必不可少的技术
· Open-Sora 2.0 重磅开源!
· 字符编码:从基础到乱码解决
2017-08-19 制作新的train,test数据集
2017-08-19 python读取.mat文件
2017-08-19 numpy.random.randint
2017-08-19 python小括号( )与中括号 [ ]