
《SystemVerilog验证-测试平台编写指南》学习 - 第1章 验证导论
---- # 《SystemVerilog验证-测试平台编写指南》学习 - 第1章 验证导论 ----
测试平台(testbench)的功能
- 产生激励(Generate stimulus);
- 把激励输入到待测设计上(DUV,Design Under Verification);
- 产生预期(Generate Expectation);
- 捕捉响应(Capture response);
- 检验响应的正确性(Check the response for correctness);
- 根据验证目标评估验证进度(Measure the progress against the overall verification goals);
验证四要素:
- 灌激励:(产生输入信号)
- 做预期:(产生预期结果)
- 集响应:(收集输出信号)
- 作比较:(比较响应和预期结果)
方法学基础
本书采用如下原则:
- 受约束的随机激励;
- 功能覆盖率;
- 使用事务处理器的分层测试平台;
- 对所有测试通用的测试平台;
- 独立于测试平台之外的个性化测试代码;
这些原则是相关联的。随机激励对测试复杂设计十分关键。
定向测试:找出设计中预期的漏洞;
随机测试:找出预料不到的漏洞;
当使用随机激励时,需要用功能覆盖率来评估验证进度。一旦开始使用自动生成的激励,就需要一种能够自动预测结果的方式 -- 通常是计分板或参考模型。
1. 受约束的随机激励
为什么要约束?
答:
虽然你希望仿真器能产生随机激励,但同时有不希望这些激励数值完全随机。
你的随机化对象是什么?
需要广泛地考虑所有的设计输入,而不是仅仅是数据字段,如下所列:
- 设备和环境配置;
你应该对整个环境的配置进行随机化,包括仿真的时长、设备的数量,以及它们的配置方式。当然,你需要创建约束以确保配置的合法性。- 输入数据;
你需要事先估计好所有的分层协议和错误注入,以及计分板的内容和功能覆盖率。- 协议异常、错误和违例;
应该尽量尝试去仿真在实际的硬件中可能出现的错误,而且应该针对所有可能出现的错误。- 时延和同步;
尝试协调各个驱动器使他们能够在不同的速率下进行通信。
2. 功能覆盖率
你需要知道哪些部分已经被验证过,这样才能对验证计划中的项目进行核对。
功能覆盖率的测量和使用:
- 添加代码用于监控进入设备中的激励,以及设备对激励的反应,并据此确定哪些功能已经被验证过;
- 运行几次仿真,每次使用不同的种子,合并报告;
- 分析结果,采用新的激励测试未被测试到的条件和逻辑;
随机测试需要使用反馈。最初的测试会被运行很多次,使用不同的种子,创建很多互异的输入序列。但是到了最后,即时使用新的种子,所产生的激励也很可能无法在设计空间中探测到新区域。
随着功能覆盖率逐渐接近极限,你需要改变测试,以期望能找出新的方法去达到那些尚未被覆盖的区域。这被称为“ 覆盖率驱动的验证 ”
在受约束的随机激励中很少采用动态反馈。相反地,需要手工分析覆盖率报告,然后调整随机约束。
3. 分层的测试平台
不分层的的测试平台或者低层次的Verilog测试就是初学Verilog时写的简单testbench那种形式。
如下图所示是带着所有层次的完整测试平台:
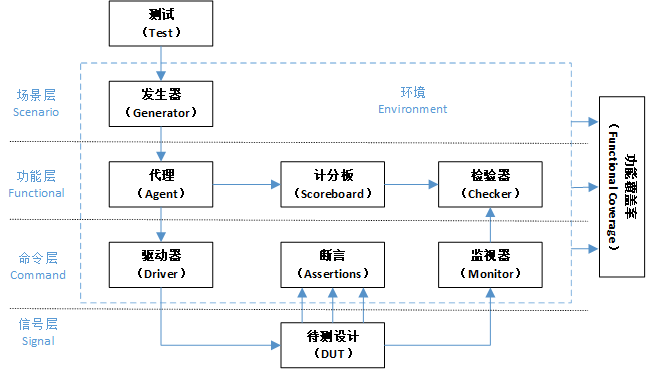
- 信号层:把待测设计和测试平台相连;
- 命令层:驱动器驱动待测设计的输入和监视器检测待测设计的输出变化,并把这些变化按照命令分组。断言也穿过命令层和信号层,负责监视独立的信号以寻找穿越整个命令的信号变化;
- 功能层:代理(在VMM中称为事务处理器)接收到来自上层的事务,例如DMA读或者写,把它们分解成独立的命令。这些命令也被送往用于预测事务结果的计分板。检测器则负责比较来自监视器和计分板的命令;
- 场景层:功能层被位于场景层中的发生器所驱动。所谓的场景就是操作步骤,场景层就是负责组织协调这些步骤的;
- 测试层和功能覆盖率:测试平台的最顶层 -- 测试层,就像一个指挥官,不演奏任何乐器却引领者其他人的表演。测试包含了用于创建激励的约束。功能覆盖率可以衡量所有测试在满足验证计划要求方面的进展。随着各项测量标准的完成,功能覆盖率代码在整个项目过程中会经常变化。由于代码经常被修改,所以它不作为测试环境的组成部分。
建立一个分层的测试平台
1. 创建一个简单的驱动器
如之前所说,驱动器接收来自代理的命令。驱动器可能会注入错误或增加时延,然后再把命令分解成一些信号的变化,例如总线请求或者握手。这样的一个测试平台模块通常被称为“事务处理器(transactor)”,它的核心部分是一个循环:有关事务处理器的示范代码如下所示。
task run();
done = 0;
while (!done) begin
// 获取下一个事务
// 进行变换
// 发送事务
end
endtask
2. 仿真环境阶段
- 建立(build)
- 生成配置:把待测设计的配置和周围的环境随机化;
- 建立环境:基于配置来分配和连接测试平台构件;
- 对待测设计进行复位;
- 配置待测设计:基于第一步中生成的配置,载入待测设计的命令寄存器;
- 运行(run)
- 启动环境:运行测试平台构件,例如各种BFM和激励发生器;
- 运行测试:启动测试然后等待测试完成。定向测试很容易判断,但随机测试却比较困难。可以使用测试平台的层作为引导。从顶层启动,等待一个层接收完来自上一层的所有输入,接着等待当前层空闲下来,然后再等待下一层。应该同时使用超时检测保证待测设计或者测试平台不出现死锁;
- 收尾(wrap-up)
- 清空:在最下层完成以后,你需要等待待测设计清空最后的事务;
- 报告:一旦待测设计空闲下来,你就可以清空遗留在待测设计中的数据了。你可以根据这些信息创建最终报告,如果测试失败,务必把相应的功能覆盖率结果删除,因为他们可能是不正确的。
3. 最大限度代码重用
为了验证一个带有数百个特性的复杂设备,必须编写数百个定向测试。如果使用受约束的随机激励,你需要编写的测试就会少很多。
与定向测试相比,随机测试的主要工作是构建测试平台,使它包含所有较低的层:场景、功能、命令以及信号。这个测试平台代码要能够被所有的测试使用,所以它需要有很好的通用性。
4. 测试平台的性能
创建受约束的随机测试需要几个步骤:
- 建立分层的测试平台,包括自检的部分;
- 按照验证计划中列举的目标创建激励,你可以使用随机约束,也可以采用注入错误或者协议违例等迂回的方式;
- 功能覆盖率,这项任务的开始是创建一个强有力的验证计划,这个计划必须带有清晰而且便于测量的目标;
- 收集数据,结果分析;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号