FPGA图像处理——数字识别
一、基于FPGA的数字识别方法
常见算法有:基于模版匹配的识别方法、基于BP 神经网络的识别方法、基于数字特征的识别方法等。
1.模版匹配法
模版匹配法是一种被较早应用的数字识别算法,该算法的关键是对所要识别的所有数字进行模版构建,之后将图像中的数字与所有的数字模版一一进行比较,计算出图像中数字与每个模版的相似度,根据所计算出的相似度结果进行识别。其中相似度最高的模版即为我们所要识别的结果。模版匹配法的对数字的大小、结构形状的规范化程度要求很高,数字的规范化程度对识别的准确率有着直接的影响。该算法原理较为简单,但计算复杂度过大,同时不利于 FPGA 的实现。
2.神经网络识别法
神经网络识别的方法是模仿动物神经网络的特征,对信息进行分布式并行处理的一种算法。神经网络识别算法具有一定的抗干扰能力,但为了保证识别的准确率,该算法需要负责并且大量的计算,来对神经网络进行训练,而过于复杂的计算不利于 FPGA 对该算法的实现。
3.数字特征识别法
基于数字特征的识别算法其核心是通过对数字的形状以及结构等几何特征进行分析与统计,通过对数字特征的识别从而达到对图像中数字的识别。
二、基于数字特征的数字识别
对于数字0~9,可通过两条水平特征线和一条垂直特征线来区分,如下图所示:
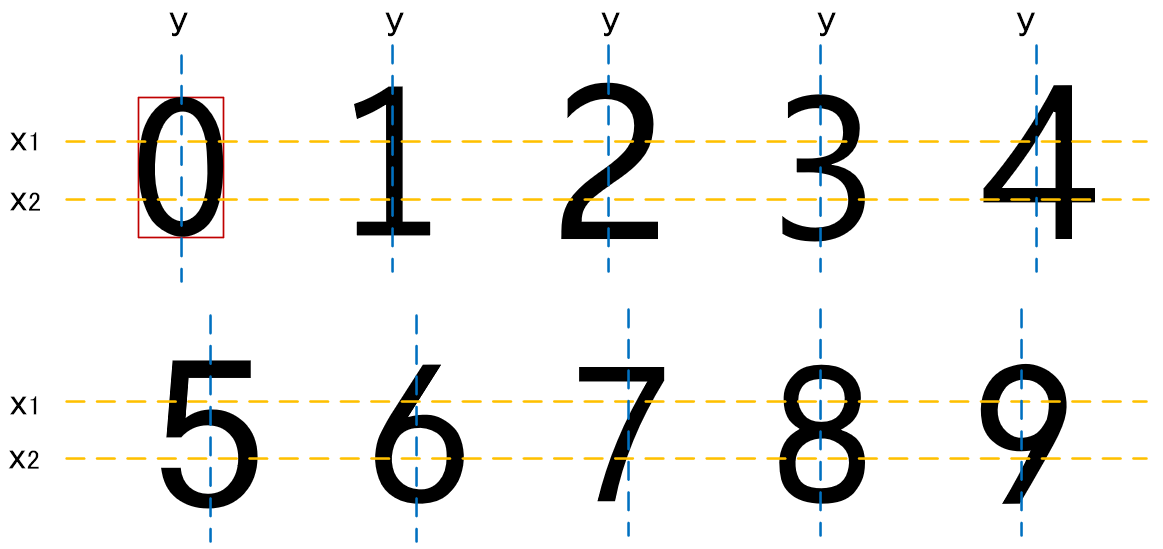
上图中红框是数字的上下左右边界。X1在竖直方向的 2/5 处的水平线,x2在竖直方向的 2/3 处的水平线,y在水平方的 1/2 处的水直线。我们以此特征来统计x1,x2,y与数字的交叉点。
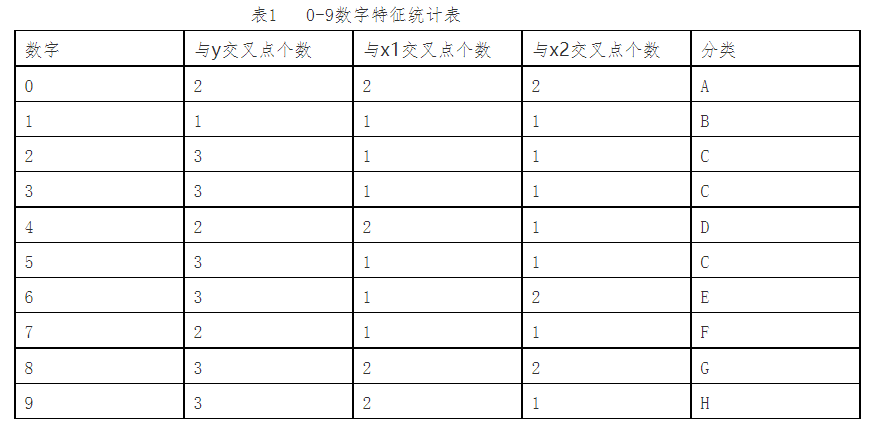
以交叉统计法来区分0~9数字的特征如下表1:
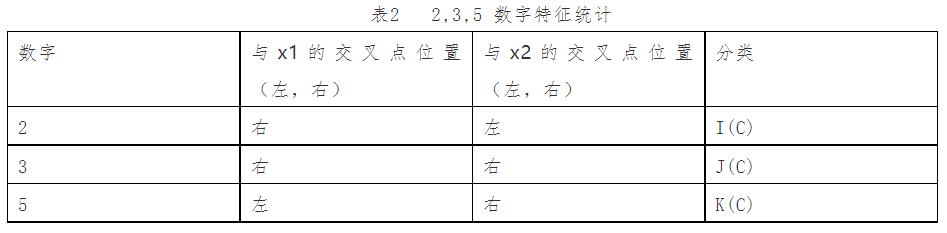
由于2,3,5的数字特征统计表一样,无法区分所以我们继续增加数字特征以区分2,3,5。如表2:
【注】:不同字体的数字特征线位置x1和x2根据具体情况而定,而车牌中的数字是由黑体改变而来,这点需要测试找到合适画线位置。
三、Matlab实现数字识别
clear all;close all;clc;
I = imread('D:\FPGA\Test photo\num\5.jpg');
Ib =im2bw(I);
% Ib =~Ib; %黑字白底和黑底白字模板相反
%---------------步骤1:找到字符上下左右边界---------------------
[ROW,COL] =size(Ib);
min_x=ROW;
max_x=0;
min_y=COL;
max_y=0;
for i=1:ROW
for j=1:COL
if Ib(i,j)==0
if(min_x>i)
min_x = i;
end
if(max_x<i)
max_x = i;
end
if(min_y>j)
min_y = j;
end
if(max_y<j)
max_y = j;
end
end
end
end
%--------------- 步骤2:画特征线---------------
height = max_x - min_x;
x1 = round(min_x+height*2/6);
x2 = round(min_x+height*4/5);
width = max_y - min_y;
y = round(min_y + width*1/2);
for i=1:ROW
for j=1:COL
if(i >= min_x && i <= max_x)&&(j==min_y ||j==max_y || j==y)
R(i,j,1)= 255;
R(i,j,2)= 0;
R(i,j,3)= 0;
elseif(i == min_x || i == max_x || i ==x1 || i ==x2)&&(j>=min_y && j<=max_y)
R(i,j,1)= 255;
R(i,j,2)= 0;
R(i,j,3)= 0;
else
R(i,j,1)= I(i,j,1); %I(i,j,1)
R(i,j,2)= I(i,j,2);
R(i,j,3)= I(i,j,3);
end
end
end
figure;
imshow(R);
%---------------步骤3:统计特征信息---------------------
cross_y=0;
cross_x1_L=0;
cross_x1_R=0;
cross_x2_L=0;
cross_x2_R=0;
for i=1:ROW-1
for j=1:COL-1
if j == y && Ib(i,j)==1&&Ib(i+1,j)==0
cross_y =cross_y+1;
elseif i == x1 && Ib(i,j)==1&&Ib(i,j+1)==0
if(j<y)
cross_x1_L =cross_x1_L+1;
elseif(j>y)
cross_x1_R =cross_x1_R+1;
end
elseif i == x2 && Ib(i,j)==1&&Ib(i,j+1)==0
if(j<y)
cross_x2_L =cross_x2_L+1;
elseif(j>y)
cross_x2_R =cross_x2_R+1;
end
end
end
end
%---------------步骤4:根据交点数匹配数字---------------
cross_x1=cross_x1_L+cross_x1_R;
cross_x2=cross_x2_L+cross_x2_R;
result=NaN;
if(cross_y==1)
if(cross_x1==1 && cross_x2==1)
result=1;
end
elseif(cross_y==2)
if(cross_x1==1 && cross_x2==1)
result=7;
elseif(cross_x1==2 && cross_x2==1)
result=4;
elseif(cross_x1==2 && cross_x2==2)
result=0;
end
elseif(cross_y==3)
if(cross_x1==1 && cross_x2==2)
result=6;
elseif(cross_x1==2 && cross_x2==1)
result=9;
elseif(cross_x1==2 && cross_x2==2)
result=8;
elseif(cross_x1==1 && cross_x2==1)
if(cross_x1_R==1 && cross_x2_L==1)
result=2;
elseif(cross_x1_R==1 && cross_x2_R==1)
result=3;
elseif(cross_x1_L==1 && cross_x2_R==1)
result=5;
end
end
end
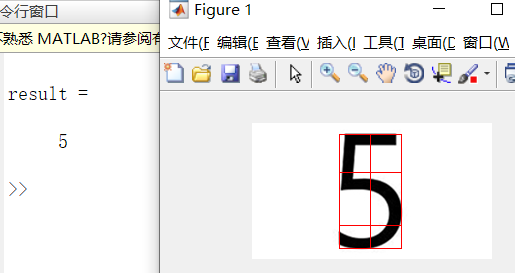
display(result);
Matlab结果:
四、FPGA实现数字识别
数字识别分四步:
1.字符边界选框。通过检测字符黑色像素来膨胀式包络出边界。注:此处需消耗一帧时间来检测,相邻两帧图像差别很小。
2.画特征线。根据前一帧的边界值得到两条水平特征线x1、x2和一条垂直特征线y。注:进行判断会消耗1clk,显示的行场同步信号需打一拍。
3.统计特征信息。对于交点数进行统计,由于背景(白)到字符(黑)存在01跳变,利用状态转移的方法来检测交点数。注:图像输入是经过处理后的黑白二值图,不存在噪声干扰。
4.根据特征信息匹配数字。对于数字2、3、5的检测进行了两层匹配。注:在一帧特征信息统计完后再利用寄存器寄存,对于想输出特征信息也方便显示。
完整代码如下:(代码中有详细注释)
1 //////////////////////////////////////////////////////////////////////////////////
2 // Create Date: 16:49:38 06/20/2021
3 // Author Name: yiquwange
4 // Module Name: Digital_Rec
5 // Project Name: Image processing
6 // Target Devices: ALINX AX309
7 // Tool versions: ISE14.7
8 // Description: 0~9 numeral recognition based on digital features
9 // Revision: 1.0
10 //////////////////////////////////////////////////////////////////////////////////
11
12 module Digital_Rec(
13 input clk,
14 input rst_n,
15 input Y_de,
16 input Y_hs,
17 input Y_vs,
18 input [10:0] hcount, //行计数坐标
19 input [10:0] vcount, //场计数坐标
20 input [7:0] Y_data, //经二值化后的数据,数字黑色(8'd0),背景白色(8'd255),也可用1bit:0、1表示
21 output DR_de, //输出使能信号
22 output DR_hs, //行同步信号
23 output DR_vs, //场同步信号
24 output reg [3:0] result, //识别结果,用于数码管显示
25 /*
26 output reg [1:0] cross_y_r, //中间测试用于数码管显示
27 output reg [1:0] cross_x1_L_r,
28 output reg [1:0] cross_x1_R_r,
29 output reg [1:0] cross_x2_L_r,
30 output reg [1:0] cross_x2_R_r,*/
31 output reg [23:0] DR_data
32 );
33
34 parameter ROW = 10'd272; //图片高
35 parameter COL = 10'd480; //图片宽
36
37
38 reg [3:0] result;
39 //特征线交点计数
40 reg [1:0] cross_y;
41 reg [1:0] cross_x1;
42 reg [1:0] cross_x2;
43 reg [1:0] cross_x1_L;
44 reg [1:0] cross_x1_R;
45 reg [1:0] cross_x2_L;
46 reg [1:0] cross_x2_R;
47
48 wire pos_vs;
49 wire neg_vs;
50 reg [10:0] min_x;
51 reg [10:0] max_x;
52 reg [10:0] min_y;
53 reg [10:0] max_y;
54 wire dis_en;
55 reg dis_en_r;
56 wire dis_en_pos;
57 wire dis_en_neg;
58 wire [10:0] cnt_col; //图片显示区域的行计数
59 wire [10:0] cnt_row; //图片显示区域的场计数
60 reg [10:0] cnt_col_r;
61 reg [10:0] cnt_row_r;
62 assign cnt_col = hcount; //这里如果图片尺寸小于显示屏尺寸可进行坐标转换
63 assign cnt_row = vcount;
64 assign dis_en = Y_de;
65
66 always @(posedge clk or negedge rst_n)
67 if(!rst_n)
68 dis_en_r <= 0;
69 else
70 dis_en_r <= dis_en;
71
72 assign dis_en_pos = dis_en && !dis_en_r;
73 assign dis_en_neg = !dis_en && dis_en_r;
74
75 always @(posedge clk or negedge rst_n)
76 if(!rst_n)
77 Y_vs_r <= 0;
78 else
79 Y_vs_r <= Y_vs;
80
81 assign pos_vs = Y_vs && !Y_vs_r;
82 assign neg_vs = !Y_vs && Y_vs_r;
83
84
85 //第1帧,找到字符上下左右边界
86 always @(posedge clk or negedge rst_n) begin
87 if(!rst_n) begin
88 min_x <= ROW-1; //初始时最小值赋值最大
89 min_y <= COL-1;
90 max_x <= 0; //初始时最大值赋值最小
91 max_y <= 0;
92 end
93 else if(neg_vs) begin
94 min_x <= ROW-1;
95 min_y <= COL-1;
96 max_x <= 0;
97 max_y <= 0;
98 end
99 else if(dis_en && Y_data==0) begin //检测到黑色字符开始更新边界
100 if(min_x>cnt_row) //检测原理类似单形体膨胀算法
101 min_x <= cnt_row;
102 else
103 min_x <= min_x;
104 if(max_x<cnt_row)
105 max_x <= cnt_row;
106 else
107 max_x <= max_x;
108 if(min_y>cnt_col)
109 min_y <= cnt_col;
110 else
111 min_y <= min_y;
112 if(max_y<cnt_col)
113 max_y <= cnt_col;
114 else
115 max_y <= max_y;
116 end
117 end
118
119
120 reg [10:0] min_x_r;
121 reg [10:0] max_x_r;
122 reg [10:0] min_y_r;
123 reg [10:0] max_y_r;
124
125 //帧同步锁存边框角点检测结果
126 always @(posedge clk or negedge rst_n)
127 if(!rst_n)begin
128 min_x_r <= 0;
129 max_x_r <= 0;
130 min_y_r <= 0;
131 max_y_r <= 0;
132 end
133 else if(neg_vs)begin
134 min_x_r <= min_x;
135 max_x_r <= max_x;
136 min_y_r <= min_y;
137 max_y_r <= max_y;
138 end
139
140
141 //得到特征线坐标
142 //画两横一竖三条线,第一条横线位于高度的2/5,第二条横线位于高度2/3处,
143 //竖线位于宽度的1/2,对这三条线与数字的交点个数及交点位置进行统计和分析
144 //reg [10:0] height;
145 //reg [10:0] width;
146 reg [10:0] x1;
147 reg [10:0] x2;
148 reg [10:0] y;
149
150 always@(posedge clk or negedge rst_n)begin
151 if(!rst_n) begin
152 x1 <= 0;
153 x2 <= 0;
154 y <= 0;
155 end
156 else if(pos_vs) begin
157 x1 <= min_x_r+(max_x_r - min_x_r)*1/3; //不建议这样写,多步操作应分时钟进行
158 x2 <= min_x_r+(max_x_r - min_x_r)*4/5; //复杂的乘除操作应借助IP核
159 y <= min_y_r +(max_y_r - min_y_r)/2;
160 end
161 end
162
163
164 //第2帧,画特征线定位 【1clk】
165 always @(posedge clk or negedge rst_n) begin
166 if(!rst_n) begin
167 DR_data <= {Y_data,Y_data,Y_data};
168 end
169 else if(dis_en) begin //有效显示区域
170 if((cnt_row >= min_x_r && cnt_row <= max_x_r)&&(cnt_col == min_y_r || cnt_col == max_y_r || cnt_col == y))
171 DR_data <= {8'hff,8'h0,8'h0}; //竖向红线
172 else if((cnt_col >= min_y_r && cnt_col <= max_y_r)&&(cnt_row == min_x_r || cnt_row == max_x_r || cnt_row == x1 || cnt_row == x2))
173 DR_data <= {8'hff,8'h0,8'h0}; //横向红线
174 else
175 DR_data <= {Y_data,Y_data,Y_data}; //其它区域不变
176 end
177 else
178 DR_data <= {Y_data,Y_data,Y_data};
179 end
180
181
182 //----------------------------------------------------------------------------
183 //---------------------- 特征线交点检测 ----------------------------------
184 //设置一段式状态机来检测像素灰度值变化:
185 //背景(1)到背景(1)、背景(1)到数字(0)、数字(0)到数字(0)、数字(0)到背景(1)
186 parameter IDLE=4'd0,CHECK_LEFT=4'd1,LEFT=4'd2,CHECK_RIGHT=4'd3,RIGHT=4'd4;
187 parameter CHECK_UP=4'd5,UP=4'd6,CHECK_DOWN=4'd7,DOWN=4'd8;
188 reg [3:0] state_x1; //x1特征线左右边沿状态
189 reg [3:0] state_x2;
190 reg [3:0] state_y; //y特征线上下边沿状态
191
192 always@(posedge clk or negedge rst_n)begin
193 if( !rst_n)
194 state_x1 <= IDLE;
195 else if(dis_en && cnt_row == x1)begin //x1特征线检测
196 case(state_x1)
197 IDLE:
198 state_x1 <= Y_data ? CHECK_LEFT : CHECK_RIGHT; //真(白色背景)假(黑色数字)
199 CHECK_LEFT:
200 state_x1 <= Y_data ? CHECK_LEFT : LEFT;
201 LEFT:
202 state_x1 <= CHECK_RIGHT;
203 CHECK_RIGHT:
204 state_x1 <= Y_data ? RIGHT : CHECK_RIGHT;
205 RIGHT:
206 state_x1 <= CHECK_LEFT;
207 default:
208 state_x1 <= IDLE;
209 endcase
210 end
211 end
212
213 always@(posedge clk or negedge rst_n)begin
214 if( !rst_n)
215 state_x2 <= IDLE;
216 else if(dis_en && cnt_row == x2)begin
217 case(state_x2)
218 IDLE:
219 state_x2 <= Y_data ? CHECK_LEFT : CHECK_RIGHT;
220 CHECK_LEFT:
221 state_x2 <= Y_data ? CHECK_LEFT : LEFT;
222 LEFT:
223 state_x2 <= CHECK_RIGHT;
224 CHECK_RIGHT:
225 state_x2 <= Y_data ? RIGHT : CHECK_RIGHT;
226 RIGHT:
227 state_x2 <= CHECK_LEFT;
228 default:
229 state_x2 <= IDLE;
230 endcase
231 end
232 end
233
234 always@(posedge clk or negedge rst_n)begin
235 if( !rst_n)
236 state_y <= IDLE;
237 else if(dis_en && cnt_col == y)begin
238 case(state_y)
239 IDLE:
240 state_y <= Y_data ? CHECK_UP : CHECK_DOWN;
241 CHECK_UP:
242 state_y <= Y_data ? CHECK_UP : UP;
243 UP:
244 state_y <= CHECK_DOWN;
245 CHECK_DOWN:
246 state_y <= Y_data ? DOWN : CHECK_DOWN;
247 DOWN:
248 state_y <= CHECK_UP;
249 default:
250 state_y <= IDLE;
251 endcase
252 end
253 end
254
255
256 always @(posedge clk or negedge rst_n) begin
257 if(!rst_n) begin
258 cross_y <= 0;
259 cross_x1 <= 0;
260 cross_x2 <= 0;
261 end
262 else if(pos_vs) begin //场同步上升沿特征交点计数清零
263 cross_y <= 0;
264 cross_x1 <= 0;
265 cross_x2 <= 0;
266 end
267 else if(state_y==UP) //也可以检测DOWN
268 cross_y <= cross_y+1;
269 else if(state_x1==LEFT)
270 cross_x1 <=cross_x1+1;
271 else if(state_x2==LEFT)
272 cross_x2 <=cross_x2+1;
273 else begin
274 cross_y <= cross_y;
275 cross_x1 <= cross_x1;
276 cross_x2 <= cross_x2;
277 end
278 end
279
280
281 //因为状态转移会消耗1clk,行场计数打拍
282 always @(posedge clk or negedge rst_n)
283 if(!rst_n)begin
284 cnt_col_r <= 0;
285 cnt_row_r <= 0;
286 end
287 else begin
288 cnt_col_r <= cnt_col;
289 cnt_row_r <= cnt_row;
290 end
291
292
293 //水平特征线的左右区域检测,只用于检测数字2、3、5
294 always @(posedge clk or negedge rst_n) begin
295 if(!rst_n) begin
296 cross_x1_L <= 0;
297 cross_x1_R <= 0;
298 cross_x2_L <= 0;
299 cross_x2_R <= 0;
300 end
301 else if(pos_vs) begin //场同步上升沿特征交点计数清零
302 cross_x1_L <= 0;
303 cross_x1_R <= 0;
304 cross_x2_L <= 0;
305 cross_x2_R <= 0;
306 end
307 else if(cnt_row_r == x1) begin //当扫描到水平特征线x1
308 if(cnt_col_r<=y && state_x1==RIGHT) //进行左右区域判断
309 cross_x1_L <=cross_x1_L+1;
310 else if(cnt_col_r>=y && state_x1==LEFT)
311 cross_x1_R <=cross_x1_R+1;
312 end
313 else if(cnt_row_r == x2) begin
314 if(cnt_col_r<=y && state_x2==RIGHT)
315 cross_x2_L <=cross_x2_L+1;
316 else if(cnt_col_r>=y && state_x2==LEFT)
317 cross_x2_R <=cross_x2_R+1;
318 end
319 else begin
320 cross_x1_L <= cross_x1_L;
321 cross_x1_R <= cross_x1_R;
322 cross_x2_L <= cross_x2_L;
323 cross_x2_R <= cross_x2_R;
324 end
325 end
326
327
328 //设置帧同步锁存器,当一帧结束后再更新特征交点数,便于数码管显示
329 always @(posedge clk or negedge rst_n) begin
330 if(!rst_n) begin
331 cross_y_r <= 0;
332 cross_x1_L_r <= 0;
333 cross_x1_R_r <= 0;
334 cross_x2_L_r <= 0;
335 cross_x2_R_r <= 0;
336 end
337 else if(pos_vs) begin
338 cross_y_r <= cross_y;
339 cross_x1_L_r <= cross_x1_L;
340 cross_x1_R_r <= cross_x1_R;
341 cross_x2_L_r <= cross_x2_L;
342 cross_x2_R_r <= cross_x2_R;
343 end
344 end
345
346
347 //根据特征交点数匹配相应数字
348 always@(posedge neg_vs)begin
349 if(cross_y==1)begin
350 if(cross_x1==1 && cross_x2==1)
351 result=4'd1;
352 end
353 else if(cross_y==2)begin
354 if(cross_x1==1 && cross_x2==1)
355 result=4'd7;
356 else if(cross_x1==2 && cross_x2==1)
357 result=4'd4;
358 else if(cross_x1==2 && cross_x2==2)
359 result=4'd0;
360 end
361 else if(cross_y==3)begin
362 if(cross_x1==1 && cross_x2==2)
363 result=4'd6;
364 else if(cross_x1==2 && cross_x2==1)
365 result=4'd9;
366 else if(cross_x1==2 && cross_x2==2)
367 result=4'd8;
368 else if(cross_x1==1 && cross_x2==1)begin
369 if(cross_x1_R==1 && cross_x2_L==1)
370 result=4'd2;
371 else if(cross_x1_R==1 && cross_x2_R==1)
372 result=4'd3;
373 else if(cross_x1_L==1 && cross_x2_R==1)
374 result=4'd5;
375 end
376 end
377 else
378 result=4'd10;
379 end
380
381
382 //==========================================================================
383 //== 信号同步
384 //==========================================================================
385 reg Y_de_r;
386 reg Y_hs_r;
387 reg Y_vs_r;
388 always @(posedge clk or negedge rst_n) begin
389 if(!rst_n) begin
390 Y_de_r <= 'b0;
391 Y_hs_r <= 'b0;
392 Y_vs_r <= 'b0;
393 end
394 else begin
395 Y_de_r <= Y_de;
396 Y_hs_r <= Y_hs;
397 Y_vs_r <= Y_vs;
398 end
399 end
400 //画特征线消耗1clk
401 assign DR_de = Y_de_r;
402 assign DR_hs = Y_hs_r;
403 assign DR_vs = Y_vs_r;
404
405 endmodule
实验效果:
FPGA图像处理——数字识别
https://www.bilibili.com/video/BV1H44y1z7zf
算法原理网上到处都是,但是对于初学者更想有一份源码,经过独自摸索终于效果差强人意,现将代码分享给广大萌新以供参考,对于不足处请指正,谢谢!
参考资料:[1] Opens Lee:FPGA开源工作室(公众号)

