

jetson-nano-issues
- jupyter import torch 报错
- failed with error code 1 in /tmp/pip-build-*
- 删除opt下的文件
- apt下载失败
- 'SPPF'问题
- vnc分辨率设置
- 多摄像头无法启动问题
- 部署自己的模型出错
- darknet调用csi
- 存储器扩容
- 备份系统
- jetson nano 国产套件U盘启动
- darknet调用csi绿屏
- 海康摄像头花屏
jupyter import torch 报错
OSError:/usr/lib/aarch64-linux-gnu/libgomp.so.1: cannot allocate memory in static TLS block
搜索下方的报错信息不难找到解决方法,大概有如下几种:
1.修改import cv2的位置,将其放在import tensorflow以及import keras之前。或者放在程序的最前面,试过放在程序的最前面没有问题。
2.在运行jupyter notebook/Lab之前引入环境变量:
export LD_PRELOAD=/usr/lib/aarch64-linux-gnu/libgomp.so.1
这其中要注意,如果你的 jupyter 被设置为开机启动(我想大多数同学都会为了方便把它设为开机启动,并且监听来自所有 IP 的连接),那么在之后引入的环境变量对之前启动的 jupyter 是无效的。
根据中外网友的反映,方案1,2都可能有效,但在笔者的测试过程中,只有方案2有效,且每次启动jupyter前都要运行一遍,十分的麻烦。但好在笔者注意到了官方人员的一个回复:
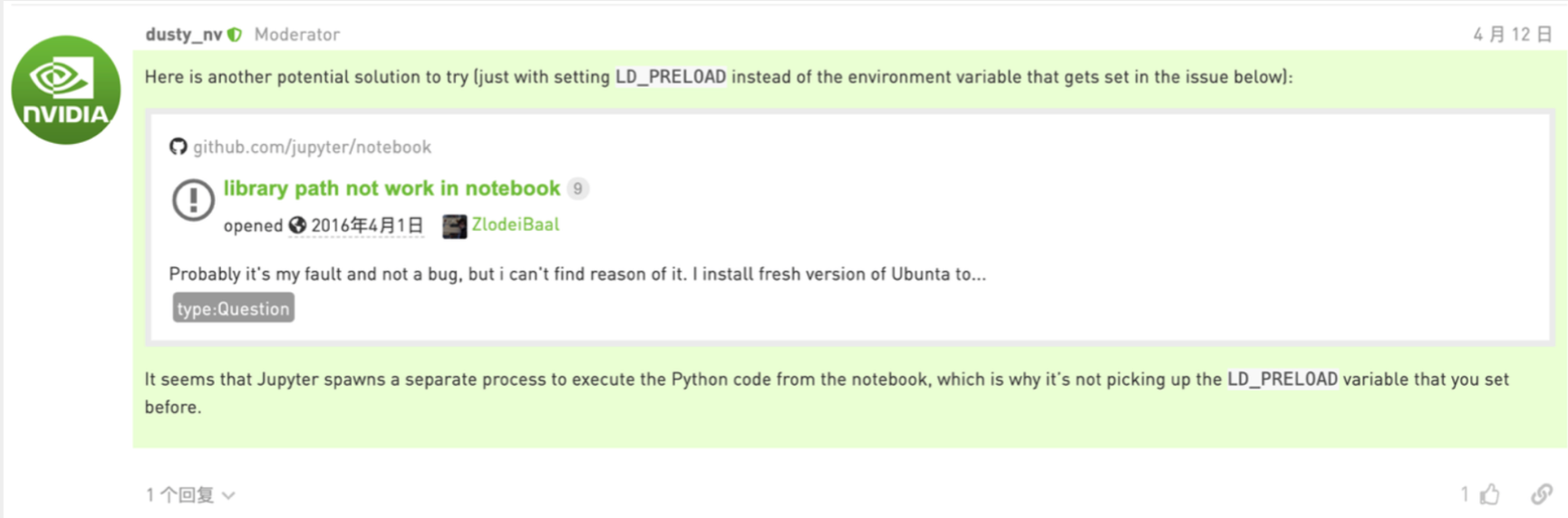
原来 jupyter 会开启另一个进程去执行 Python 代码,而我们当前引入的环境变量实际上只对当前进程有效,也就是说每一次引入的环境变量在关闭当前的SSH连接(物理机上就是当前终端窗口)后即失效了,所以每次运行jupyter notebook前都需要引入一次环境变量,是否有更方便的解决方法呢?
上文中提到,我们常常会把jupyter通过service的方式设置为开机启动,如果在开机启动时即引入环境变量,这样不就可以完美解决我们的问题了吗?
- 最终解决方案
如果你已经把 jupyter 设置为了开机启动,那么在 /etc/systemd/system 中应该会有一个.service文件(如果没有可以自己百度教程设置一下),把它用sudo权限打开后内容如下:
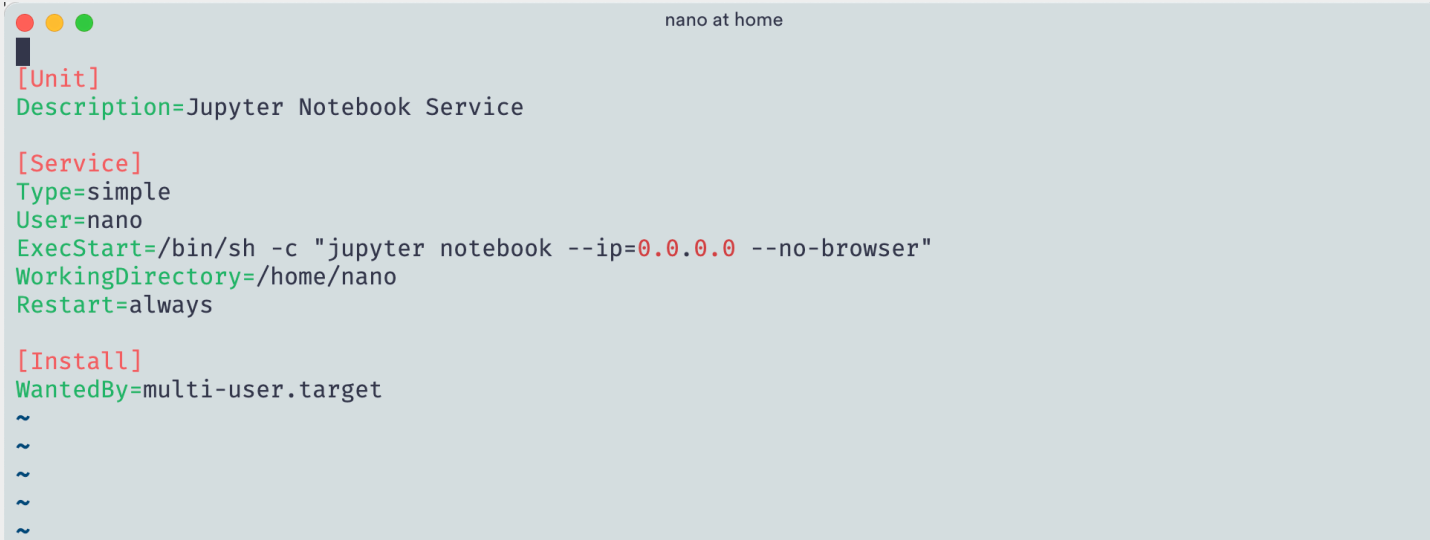
在[Service]条目中添加如下语句:
Environment="LD_PRELOAD=/usr/lib/aarch64-linux-gnu/libgomp.so.1"
保存后退出编辑,重启就完成了设置,这样在每次开机启动jupyter时都会自动引入环境变量,也就不用手动输入了
测试一下:
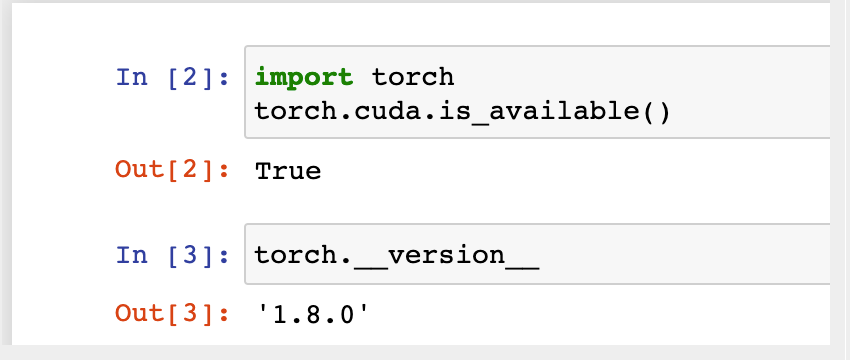
一切正常,大功告成。
failed with error code 1 in /tmp/pip-build-*
我在使用pip3 install paramiko 的时候,出现了报错
...
raise DistutilsError("Setup script exited with %s" % (v.args[0],))
distutils.errors.DistutilsError: Setup script exited with error: command 'x86_64-linux-gnu-gcc' failed with exit status 1
----------------------------------------
Command "python setup.py egg_info" failed with error code 1 in /tmp/pip-build-23ykqx51/pynacl/
百度了好久也试了前人的很多方法,最后终于找到了答案。
pip3 install --upgrade pip
然后再执行pip3 install paramiko,然没有报错安装成功了 。
删除opt下的文件
rm -rf filename
apt下载失败
下载过程如果因为网络原因失败的话可以在命令后加上 -i https://pypi.tuna.tsinghua.edu.cn/simple 来使用清华镜像源
'SPPF'问题
vnc分辨率设置
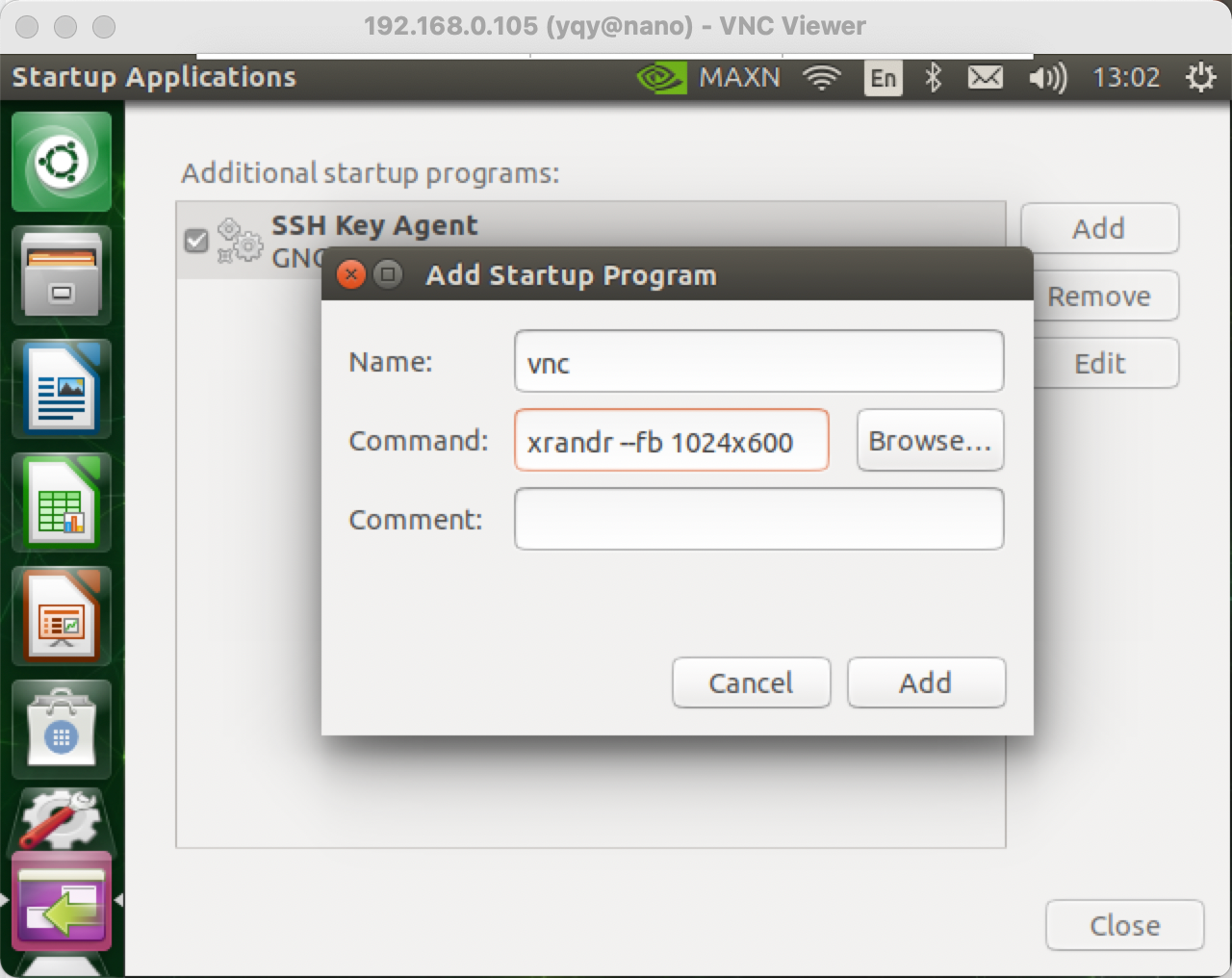
应用程序->启动应用程序中添加启动应用程序
名称随意
xrandr --fb 1024x600
多摄像头无法启动问题
DeepStream4 Jetson nano 多摄像头问题 - 智能视频分析 / DeepStream SDK - NVIDIA 开发者论坛
部署自己的模型出错
- 报错:
ERROR from primary_gie: Failed to create NvDsInferContext instance
Debug info: /dvs/git/dirty/git-master_linux/deepstream/sdk/src/gst-plugins/gst-nvinfer/gstnvinfer.cpp(809): gst_nvinfer_start (): /GstPipeline:pipeline/GstBin:primary_gie_bin/GstNvInfer:primary_gie:
Config file path: /home/yqy/workspace/Yolov5-mask-detect-in-Deepstream-5.0-tensorrt7/Deepstream 5.0/config_infer_primary_yoloV5.txt, NvDsInfer Error: NVDSINFER_CONFIG_FAILED
App run failed
- 解决:
darknet调用csi
(7条消息) jetson-nano项目:使用csi摄像头运行yolov3-tiny demo_x16516581的博客-CSDN博客_csi摄像头 jetson nano
存储器扩容
1.打开虚拟机(Ubuntu 18.04)的终端,输入以下命令安装扩容软件
sudo apt install gparted

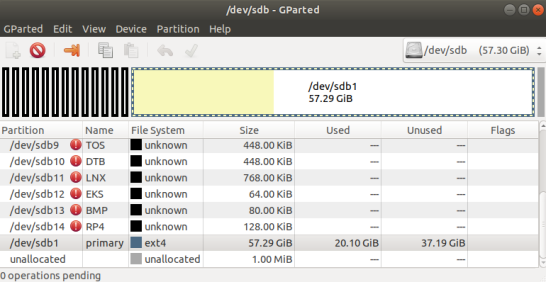
2.在虚拟机的系统应用内搜索并打开gparted
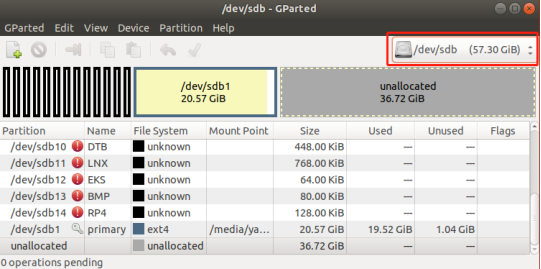
3.选择U盘的盘符,切记这几不能选错。例如我这里选择/dev/sdb,可以看到/sdb1后面有一部分是白色和一部分是灰色。
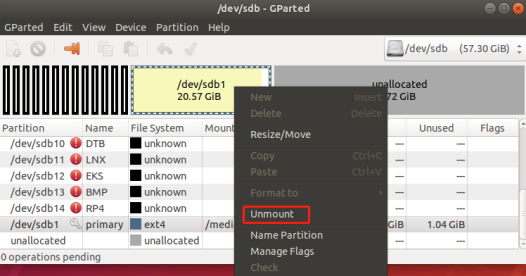
4.右键选择Unmount来卸载/dev/sdb1,
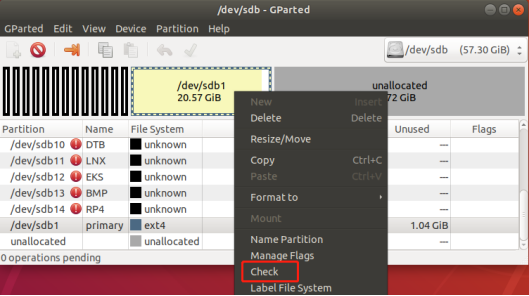
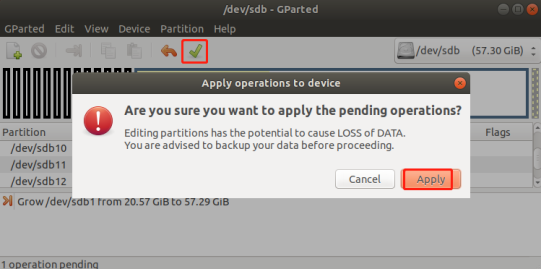
5.右键选择Check检查U盘,点击上面的勾‘√’确认,再点击Apply。
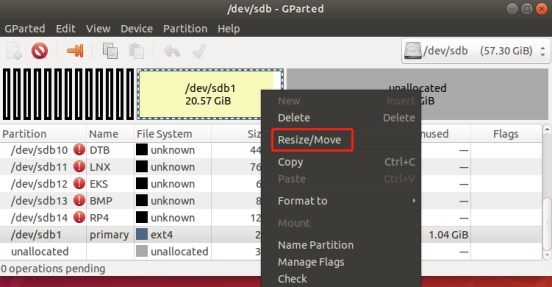
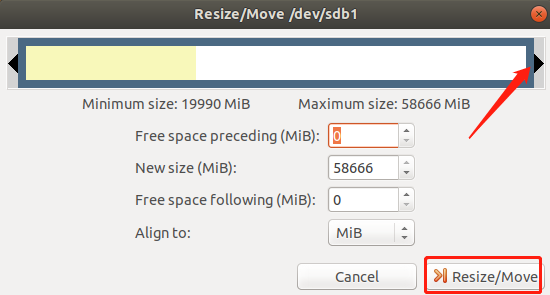
6.选择Resize/Move修改容量大小,直接将右边白色部分拖到最右边,再点击Resize/Move。
7.点击上面的勾‘√’确认,再点击Apply.
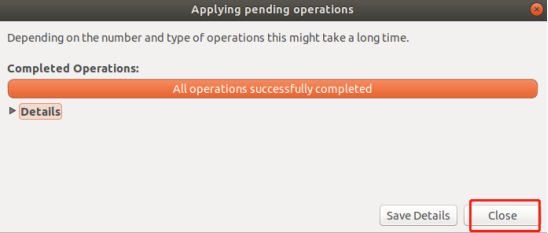
8.到此U盘扩容完成。
备份系统
Clone SD Card – Jetson Nano and Xavier NX – JetsonHacks
为树莓派制作系统镜像时进行瘦身,方便后续保存与批量写入|树莓派|tf卡|fdisk|linux|磁盘_手机网易网 (163.com)
jetson nano 国产套件U盘启动
darknet调用csi绿屏
解决Jetson Nano使用CSI摄像头在Darknet下实时检测绿屏_/wywy/的博客-CSDN博客
海康摄像头花屏
改udp连接

