opencv-python 4.7. Canny边缘检测
理论
Canny边缘检测是一种流行的边缘检测算法,它是由John F. Canny开发的。
-
这是一个多阶段算法,我们将了解其中的每个阶段。
-
降噪
由于边缘检测易受图像中的噪声影响,因此第一步是使用5x5高斯滤波器去除图像中的噪声。我们在之前的章节中已经看到了这一点。 -
计算图像的强度梯度
然后在水平和垂直方向上用Sobel核对平滑后的图像进行滤波,以获得水平方向($$ G_{x} $$)和垂直方向($$ G_{y} $$)的一阶导数。从这两个图像中,我们可以找到每个像素的边缘梯度和方向,如下所示:
$$ Edge_Gradient\left ( G \right )= \sqrt{G_{x}^{2}+G_{y}^{2}} $$
$$ Angle\left ( \theta \right )= tan^{-1}\left ( \frac{G_{y}}{G_{x}} \right ) $$
渐变方向始终垂直于边缘。梯度方向被归为四类:垂直,水平,和两个对角线。 -
非极大值抑制
在获得梯度的大小和方向之后,完成图像的全扫描以去除可能不构成边缘的任何不需要的像素。为此,在每个像素处,检查像素是否是其在梯度方向上的邻域中的局部最大值。检查下图:
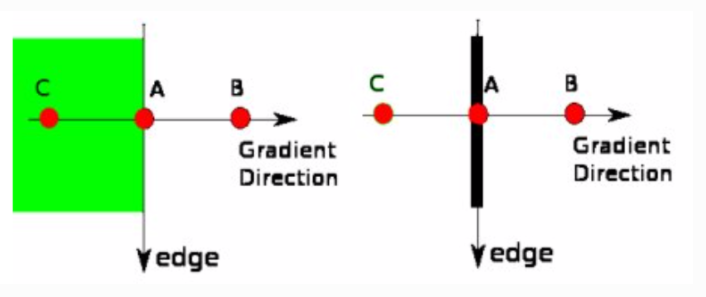
A点位于边缘(垂直方向)。渐变方向与边缘垂直。B点和C点处于梯度方向。因此,用点B和C检查点A,看它是否形成局部最大值。如果是这样,则考虑下一阶段,否则,它被抑制(置零)。
简而言之,你得到的结果是具有“细边”的二进制图像。 -
滞后阈值
这个阶段决定哪些边缘都是边缘,哪些边缘不是边缘。为此,我们需要两个阈值,minVal和maxVal。强度梯度大于maxVal的任何边缘肯定是边缘,而minVal以下的边缘肯定是非边缘的,因此被丢弃。位于这两个阈值之间的人是基于其连通性的分类边缘或非边缘。如果它们连接到“可靠边缘”像素,则它们被视为边缘的一部分。否则,他们也被丢弃。见下图:
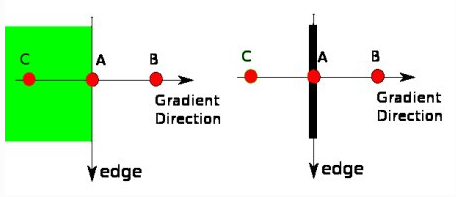
边缘A高于maxVal,因此被视为“确定边缘”。虽然边C低于maxVal,但它连接到边A,因此也被视为有效边,我们得到完整的曲线。但边缘B虽然高于minVal并且与边缘C的区域相同,但它没有连接到任何“可靠边缘”,因此被丢弃。所以我们必须相应地选择minVal和maxVal才能获得正确的结果。 假设边是长线,这个阶段也会消除小像素噪声。 所以我们最终得到的是图像中的强边缘。
OpenCV中的Canny边缘检测
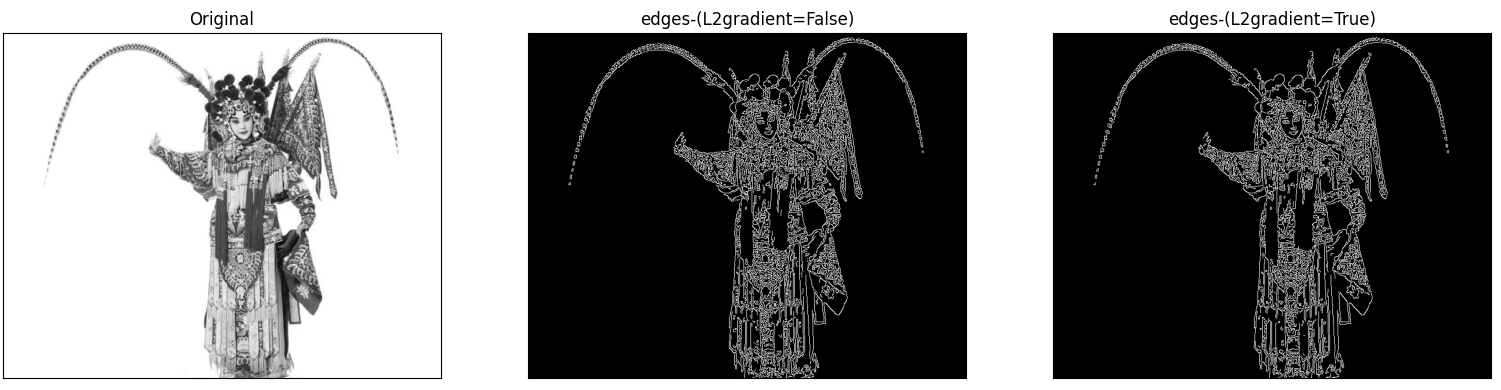
OpenCV将以上所有步骤放在单个函数cv.Canny()中。我们将看到如何使用它。第一个参数是我们的输入图像。第二个和第三个参数分别是我们的minVal和maxVal。第三个参数是aperture_size,它是用于查找图像渐变的Sobel卷积核的大小。默认情况下它是3。最后一个参数是L2gradient,它指定用于查找梯度幅度的等式。如果它是True,它使用上面提到的更准确的等式,否则它使用这个函数:$$ Edge_Gradient\left ( G \right )= \left | G_{x} \right |+\left | G_{y} \right | $$。
默认情况下,它为False。
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
img = cv.imread(r'C:\Users\yuyalong\Pictures\Saved Pictures\opera.jpg', 0)
# L2gradient=False
edges = cv.Canny(img, 100, 200)
# L2gradient=True
edges1 = cv.Canny(img, 100, 200, L2gradient=True)
plt.subplot(1, 3, 1), plt.imshow(img, cmap='gray')
plt.title('Original'), plt.xticks([]), plt.yticks([])
plt.subplot(1, 3, 2), plt.imshow(edges, cmap='gray')
plt.title('edges-(L2gradient=False)'), plt.xticks([]), plt.yticks([])
plt.subplot(1, 3, 3), plt.imshow(edges1, cmap='gray')
plt.title('edges-(L2gradient=True)'), plt.xticks([]), plt.yticks([])
plt.show()
本文作者:一枚码农
本文链接:https://www.cnblogs.com/yimeimanong/p/17272852.html
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· AI 智能体引爆开源社区「GitHub 热点速览」
· 写一个简单的SQL生成工具