
开源视觉导航飞行平台
硬件 Hardware
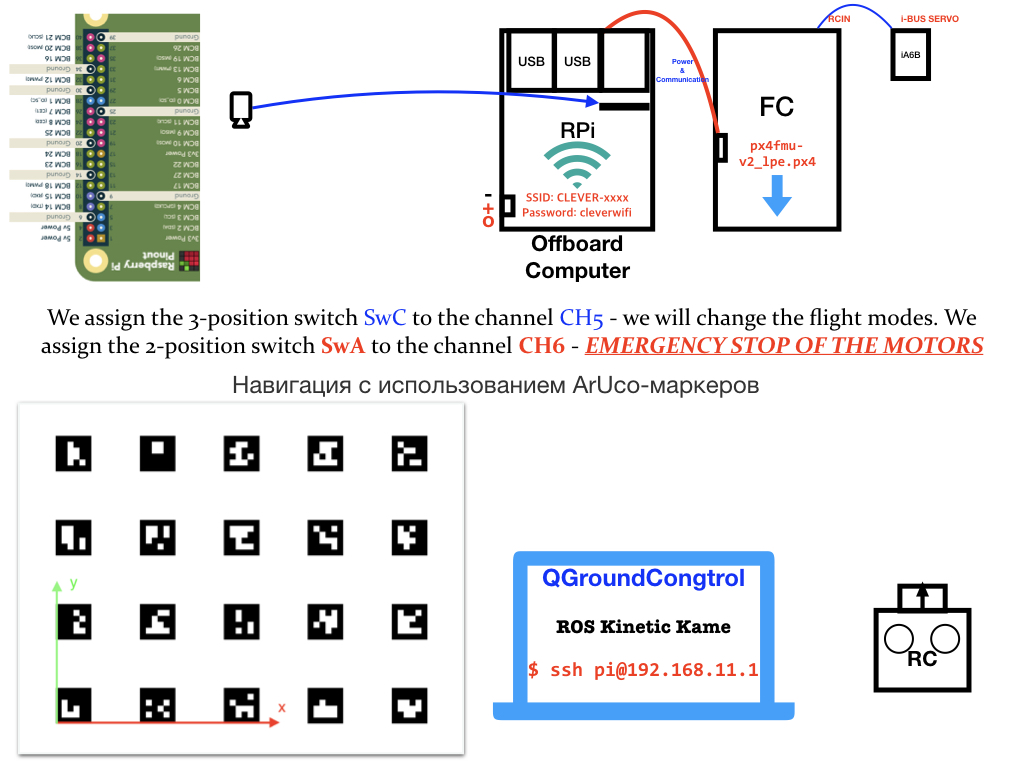
- Raspberry Pi 3b+
- RPi Camera (G), Fisheye Lens
- Pixhawk
- FS-i6
- PC Desktop
软件 Software
实验步骤
-
下载树莓派镜像,然后用Etcher烧录到SD
-
用
camera_calibration标定鱼眼相机,标定结果:image_width: 320 image_height: 240 camera_name: raspicam camera_matrix: rows: 3 cols: 3 data: [165.234351, 0.000000, 160.874331, 0.000000, 164.607285, 117.146707, 0.000000, 0.000000, 1.000000] distortion_model: plumb_bob distortion_coefficients: rows: 1 cols: 5 data: [-0.295531, 0.070424, -0.000707, -0.000872, 0.000000] rectification_matrix: rows: 3 cols: 3 data: [1.000000, 0.000000, 0.000000, 0.000000, 1.000000, 0.000000, 0.000000, 0.000000, 1.000000] projection_matrix: rows: 3 cols: 4 data: [119.307640, 0.000000, 160.228617, 0.000000, 0.000000, 132.523483, 115.096171, 0.000000, 0.000000