【ML-7】聚类算法--KNN
目录
- KNN简述
- KNN算法蛮力实现
- KNN算法之KD树
- KNN算法之球树
- KNN算法小结
一、KNN简述
邻近算法,或者说K最近邻(kNN,k-NearestNeighbor)分类算法是数据挖掘分类技术中最简单的方法之一。所谓K最近邻,就是k个最近的邻居的意思,说的是每个样本都可以用它最接近的k个邻居来代表。Cover和Hart在1968年提出了最初的邻近算法。KNN是一种分类(classification)算法,它输入基于实例的学习(instance-based learning),属于懒惰学习(lazy learning)即KNN没有显式的学习过程,也就是说没有训练阶段,数据集事先已有了分类和特征值,待收到新样本后直接进行处理。与急切学习(eager learning)相对应。
在我们平常的生活中也会不自主的应用。"近朱者赤近墨者黑"也就是KNN思想的表现。KNN方法既可以做分类,也可以做回归,这点和决策树算法相同。KNN做回归和分类的主要区别在于最后做预测时候的决策方式不同。
- KNN做分类预测时,一般是选择多数表决法,即训练集里和预测的样本特征最近的K个样本,预测为里面有最多类别数的类别。
- 而KNN做回归时,一般是选择平均法,即最近的K个样本的样本输出的平均值作为回归预测值。
由于两者区别不大,虽然本文主要是讲解KNN的分类方法,但思想对KNN的回归方法也适用。由于scikit-learn里只使用了蛮力实现(brute-force),KD树实现(KDTree)和球树(BallTree)实现,本文只讨论这几种算法的实现原理。其余的实现方法比如BBF树,MVP树等,在这里不做讨论。
例子说明一下:如下图,绿色圆要被决定赋予哪个类,是红色三角形还是蓝色四方形?如果K=3,由于红色三角形所占比例为2/3,绿色圆将被赋予红色三角形那个类,如果K=5,由于蓝色四方形比例为3/5,因此绿色圆被赋予蓝色四方形类。
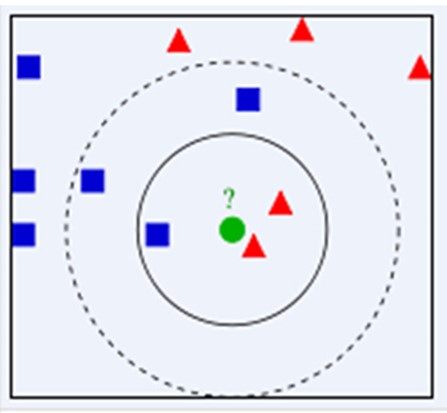
由此也说明了KNN算法的结果很大程度取决于K的选择。
在KNN中,通过计算对象间距离来作为各个对象之间的非相似性指标,避免了对象之间的匹配问题,在这里距离有多种,可以参考另一篇文章,一般使用欧氏距离或曼哈顿距离:
二、KNN算法蛮力实现
既然我们要找到k个最近的邻居来做预测,那么我们只需要计算预测样本和所有训练集中的样本的距离,然后计算出最小的k个距离即可,接着多数表决,很容易做出预测。这个方法的确简单直接,在样本量少,样本特征少的时候有效。但是在实际运用中很多时候用不上,为什么呢?因为我们经常碰到样本的特征数有上千以上,样本量有几十万以上,如果我们这要去预测少量的测试集样本,算法的时间效率很成问题。因此,这个方法我们一般称之为蛮力实现。比较适合于少量样本的简单模型的时候用。
其算法的描述为:
1)计算测试数据与各个训练数据之间的距离;
2)按照距离的递增关系进行排序;
3)选取距离最小的K个点;
4)确定前K个点所在类别的出现频率;
5)返回前K个点中出现频率最高的类别作为测试数据的预测分类。
既然蛮力实现在特征多,样本多的时候很有局限性,那么我们有没有其他的好办法呢?有!这里我们讲解两种办法,一个是KD树实现,一个是球树实现。
三、KNN算法之KD树
KD树算法没有一开始就尝试对测试样本分类,而是先对训练集建模,建立的模型就是KD树,建好了模型再对测试集做预测。所谓的KD树就是K个特征维度的树,注意这里的K和KNN中的K的意思不同。KNN中的K代表最近的K个样本,KD树中的K代表样本特征的维数。为了防止混淆,后面我们称特征维数为n。
KD树算法包括三步,第一步是建树,第二部是搜索最近邻,最后一步是预测。
3.1 KD树的建立
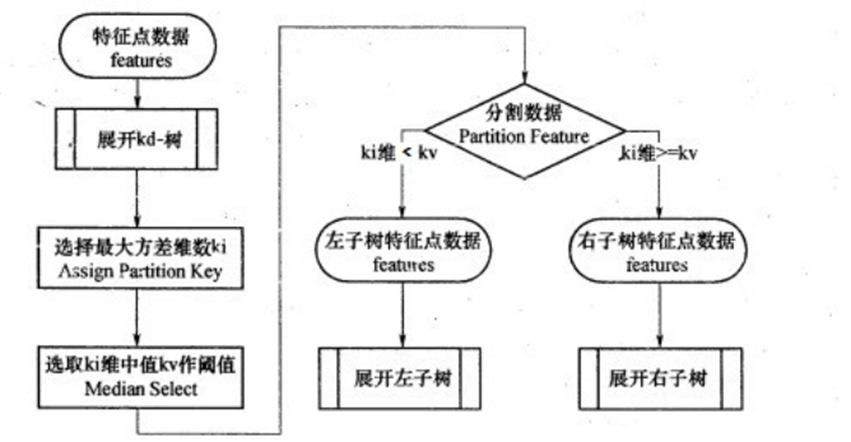
KD树建树采用的是从m个样本的n维特征中,分别计算n个特征的取值的方差,用方差最大的第k维特征nk来作为根节点。对于这个特征,我们选择特征nk的取值的中位数nkv对应的样本作为划分点,对于所有第k维特征的取值小于nkv的样本,我们划入左子树,对于第k维特征的取值大于等于nkv的样本,我们划入右子树,对于左子树和右子树,我们采用和刚才同样的办法来找方差最大的特征来做更节点,递归的生成KD树。具体流程如下图:
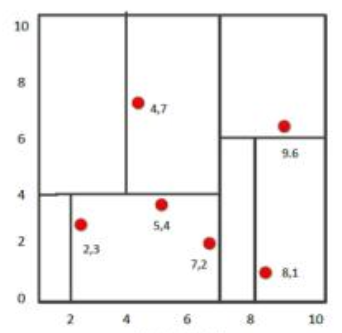
举例子:比如我们有二维样本6个,{(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)},构建kd树的具体步骤为:
1)找划分的特征:6个数据点在x,y维度上的数据方差分别为6.97,5.37,所以在x轴上方差更大,用第1维特征建树。
2)确定划分点(7,2)。根据x维上的值将数据排序,6个数据的中值(所谓中值,即中间大小的值)为7,所以划分点的数据是(7,2)。这样,该节点的分割超平面就是通过(7,2)并垂直于:划分点维度的直线x=7;
3)确定左子空间和右子空间。 分割超平面x=7将整个空间分为两部分:x<=7的部分为左子空间,包含3个节点={(2,3),(5,4),(4,7)};另一部分为右子空间,包含2个节点={(9,6),(8,1)}。
4)用同样的办法划分左子树的节点{(2,3),(5,4),(4,7)}和右子树的节点{(9,6),(8,1)}。最终得到KD树。
3.2 KD树搜索最近邻
当我们生成KD树以后,就可以去预测测试集里面的样本目标点了。对于一个目标点,我们首先在KD树里面找到包含目标点的叶子节点。以目标点为圆心,以目标点到叶子节点样本实例的距离为半径,得到一个超球体,最近邻的点一定在这个超球体内部。然后返回叶子节点的父节点,检查另一个子节点包含的超矩形体是否和超球体相交,如果相交就到这个子节点寻找是否有更加近的近邻,有的话就更新最近邻。如果不相交那就简单了,我们直接返回父节点的父节点,在另一个子树继续搜索最近邻。当回溯到根节点时,算法结束,此时保存的最近邻节点就是最终的最近邻。
从上面的描述可以看出,KD树划分后可以大大减少无效的最近邻搜索,很多样本点由于所在的超矩形体和超球体不相交,根本不需要计算距离。大大节省了计算时间。
我们用3.1建立的KD树,来看对点(2,4.5)找最近邻的过程。先进行二叉查找,先从(7,2)查找到(5,4)节点,在进行查找时是由y = 4为分割超平面的,由于查找点为y值为4.5,因此进入右子空间查找到(4,7),形成搜索路径<(7,2),(5,4),(4,7)>,但 (4,7)与目标查找点的距离为3.202,而(5,4)与查找点之间的距离为3.041,所以(5,4)为查询点的最近点; 以(2,4.5)为圆心,以3.041为半径作圆,如下图所示。可见该圆和y = 4超平面交割,所以需要进入(5,4)左子空间进行查找,也就是将(2,3)节点加入搜索路径中得<(7,2),(2,3)>;于是接着搜索至(2,3)叶子节点,(2,3)距离(2,4.5)比(5,4)要近,所以最近邻点更新为(2,3),最近距离更新为1.5;回溯查找至(5,4),直到最后回溯到根结点(7,2)的时候,以(2,4.5)为圆心1.5为半径作圆,并不和x = 7分割超平面交割,如下图所示。至此,搜索路径回溯完,返回最近邻点(2,3),最近距离1.5。对应的图如下:

3.3 KD树预测
有了KD树搜索最近邻的办法,KD树的预测就很简单了,在KD树搜索最近邻的基础上,我们选择到了第一个最近邻样本,就把它置为已选。在第二轮中,我们忽略置为已选的样本,重新选择最近邻,这样跑k次,就得到了目标的K个最近邻,然后根据多数表决法,如果是KNN分类,预测为K个最近邻里面有最多类别数的类别。如果是KNN回归,用K个最近邻样本输出的平均值作为回归预测值。
四、KNN算法之球树
KD树算法虽然提高了KNN搜索的效率,但是在某些时候效率并不高,比如当处理不均匀分布的数据集时,不管是近似方形,还是矩形,甚至正方形,都不是最好的使用形状,因为他们都有角。一个例子如下图:
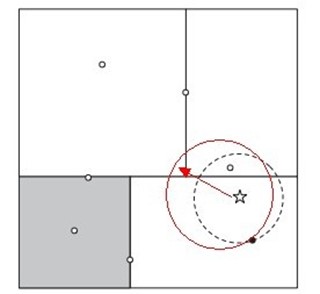
如果黑色的实例点离目标点星点再远一点,那么虚线圆会如红线所示那样扩大,导致与左上方矩形的右下角相交,既然相 交了,那么就要检查这个左上方矩形,而实际上,最近的点离星点的距离很近,检查左上方矩形区域已是多余。于此我们看见,KD树把二维平面划分成一个一个矩形,但矩形区域的角却是个难以处理的问题。为了优化超矩形体导致的搜索效率的问题,牛人们引入了球树,这种结构可以优化上面的这种问题。我们现在来看看球树建树和搜索最近邻的算法。
4.1 球树的建立
球树,顾名思义,就是每个分割块都是超球体,而不是KD树里面的超矩形体。
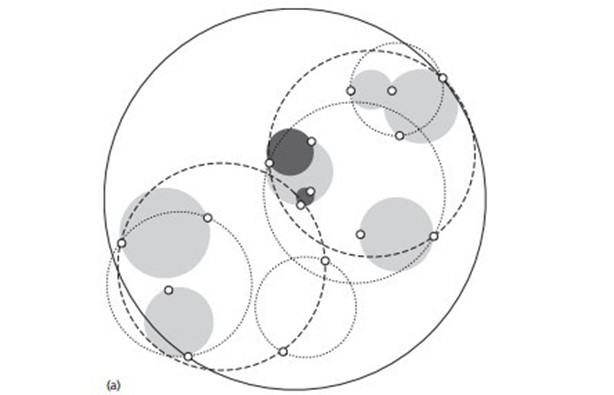
我们看看具体的建树流程:
1) 先构建一个超球体,这个超球体是可以包含所有样本的最小球体。
2) 从球中选择一个离球的中心最远的点,然后选择第二个点离第一个点最远,将球中所有的点分配到离这两个聚类中心最近的一个上,然后计算每个聚类的中心,以及聚类能够包含它所有数据点所需的最小半径。这样我们得到了两个子超球体,和KD树里面的左右子树对应。
3)对于这两个子超球体,递归执行步骤2). 最终得到了一个球树。
可以看出KD树和球树类似,主要区别在于球树得到的是节点样本组成的最小超球体,而KD得到的是节点样本组成的超矩形体,这个超球体要与对应的KD树的超矩形体小,这样在做最近邻搜索的时候,可以避免一些无谓的搜索。
4.2 球树搜索最近邻
使用球树找出给定目标点的最近邻方法是首先自上而下贯穿整棵树找出包含目标点所在的叶子,并在这个球里找出与目标点最邻近的点,这将确定出目标点距离它的最近邻点的一个上限值,然后跟KD树查找一样,检查兄弟结点,如果目标点到兄弟结点中心的距离超过兄弟结点的半径与当前的上限值之和,那么兄弟结点里不可能存在一个更近的点;否则的话,必须进一步检查位于兄弟结点以下的子树。
检查完兄弟节点后,我们向父节点回溯,继续搜索最小邻近值。当回溯到根节点时,此时的最小邻近值就是最终的搜索结果。
从上面的描述可以看出,KD树在搜索路径优化时使用的是两点之间的距离来判断,而球树使用的是两边之和大于第三边来判断,相对来说球树的判断更加复杂,但是却避免了更多的搜索,这是一个权衡。
五、KNN算法小结
KNN的主要优点:
1) 理论成熟,思想简单,既可以用来做分类也可以用来做回归
2) 可用于非线性分类
3) 训练时间复杂度比支持向量机之类的算法低,仅为O(n)
4) 和朴素贝叶斯之类的算法比,对数据没有假设,准确度高,对异常点不敏感
5) 由于KNN方法主要靠周围有限的邻近的样本,而不是靠判别类域的方法来确定所属类别的,因此对于类域的交叉或重叠较多的待分样本集来说,KNN方法较其他方法更为适合
6)该算法比较适用于样本容量比较大的类域的自动分类,而那些样本容量较小的类域采用这种算法比较容易产生误分
KNN的主要缺点:
1)计算量大,尤其是特征数非常多的时候
2)样本不平衡的时候,对稀有类别的预测准确率低
3)KD树,球树之类的模型建立需要大量的内存
4)使用懒散学习方法,基本上不学习,导致预测时速度比起逻辑回归之类的算法慢
5)相比决策树模型,KNN模型可解释性不强
大部分来自 <https://www.cnblogs.com/pinard/p/6061661.html#!comments>
附件一:测试代码
1 # coding:utf-8
2
3 from numpy import *
4 import operator
5 ##给出训练数据以及对应的类别
6 def createDataSet():
7 group = array([[1.0, 2.0], [1.2, 0.1], [0.1, 1.4], [0.3, 3.5]])
8 labels = ['A', 'A', 'B', 'B']
9 return group, labels
10 ###通过KNN进行分类
11 def classify(input, dataSet, label, k):
12 dataSize = dataSet.shape[0]
13 ####计算欧式距离
14 diff = tile(input, (dataSize, 1)) - dataSet
15 sqdiff = diff ** 2
16 squareDist = sum(sqdiff, axis=1) ###行向量分别相加,从而得到新的一个行向量
17 dist = squareDist ** 0.5
18 ##对距离进行排序
19 sortedDistIndex = argsort(dist) #argsort()根据元素的值从大到小对元素进行排序,返回下标
20 classCount = {}
21 for i in range(k):
22 voteLabel = label[sortedDistIndex[i]]
23 ###对选取的K个样本所属的类别个数进行统计
24 classCount[voteLabel] = classCount.get(voteLabel, 0) + 1
25 ###选取出现的类别次数最多的类别
26 maxCount = 0
27 for key, value in classCount.items():
28 if value > maxCount:
29 maxCount = value
30 classes = key
31 return classes
32
33 dataSet,labels = createDataSet()
34 input = array([1.1,0.3])
35 K = 3
36 output = classify(input,dataSet,labels,K)
37 print("测试数据为:",input,"分类结果为:",output)
38
39
40
结果:
测试数据为: [1.1 0.3] 分类结果为: A

