

旋转矩阵、坐标转换和向量的旋转
1.坐标转换
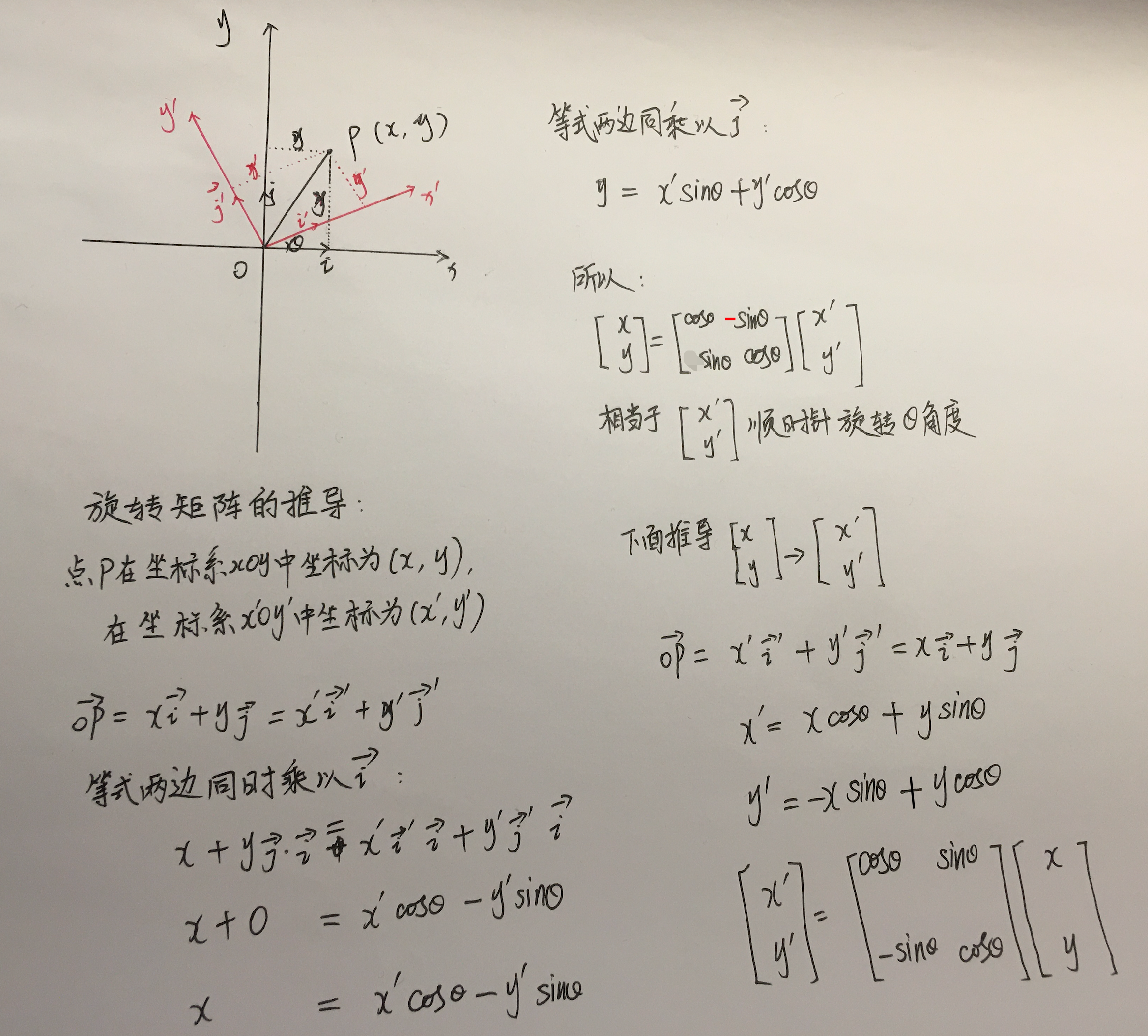
注解:
1.三维的坐标转换的推导和二维的是类似的。
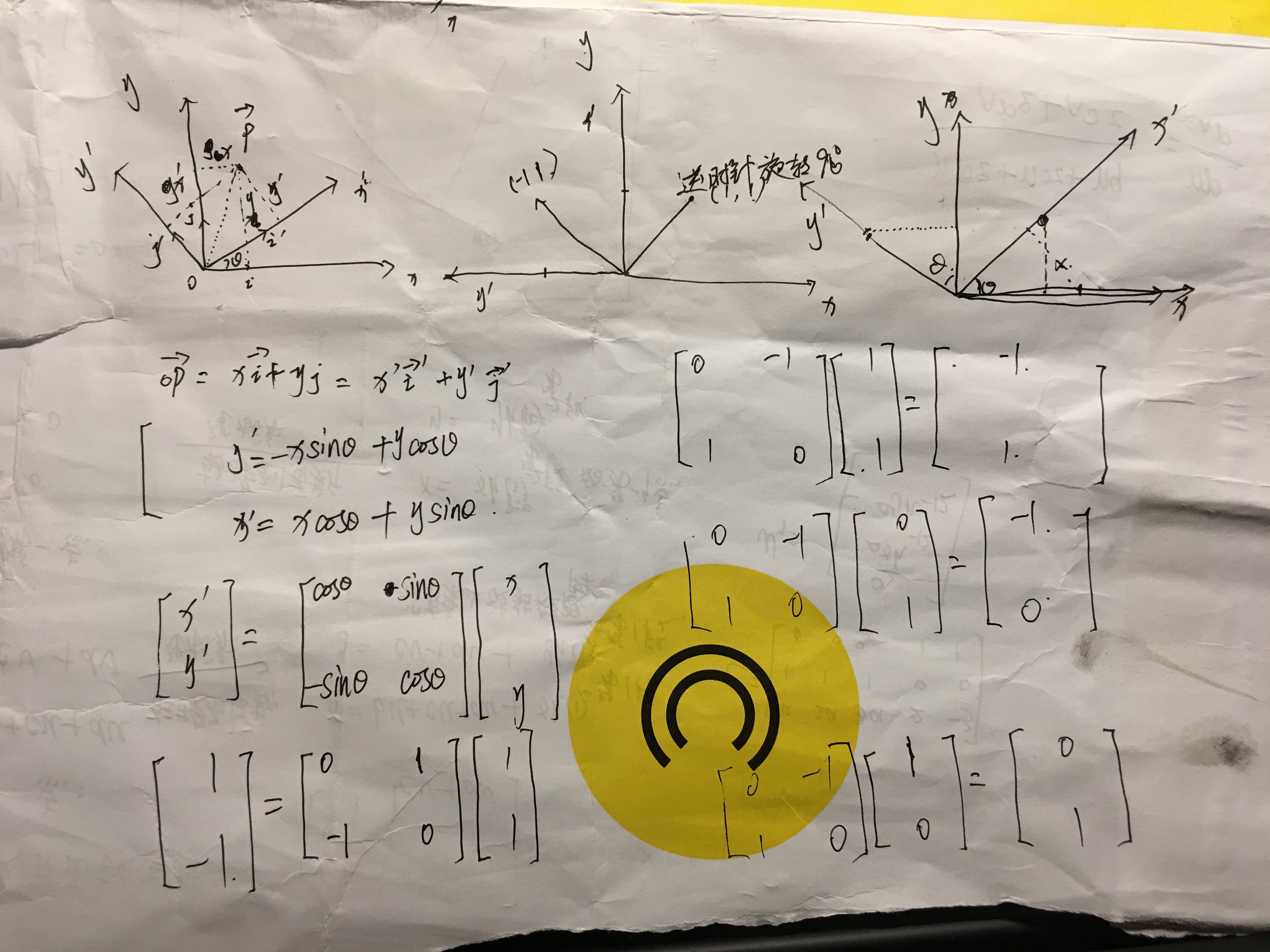
2.规律是:右手坐标系的情况下,绕Z轴逆时针旋转的话,负号写在旋转矩阵的左下角,顺时针旋转的话,负号写在旋转矩阵的右上角。如果是左手坐标系,则正负号的规律要反过来。
3.在三维空间中,2的规律适合右手坐标系,假如坐标系是左手系,则可以先把坐标系转变为右手坐标系,再做坐标的旋转。也可以这样记:右手系的正负号规律和左手系的正负号规律是相反的。
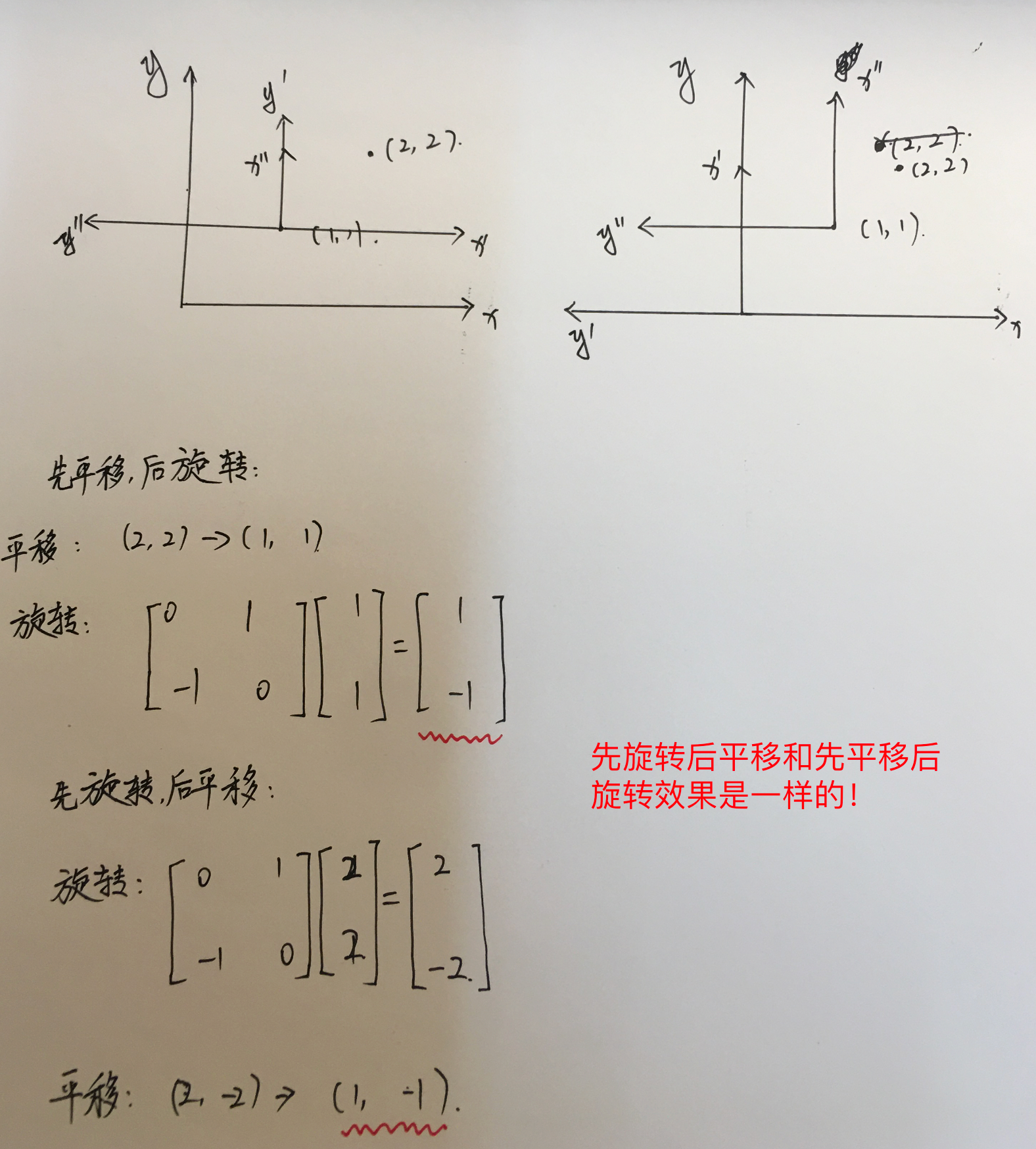
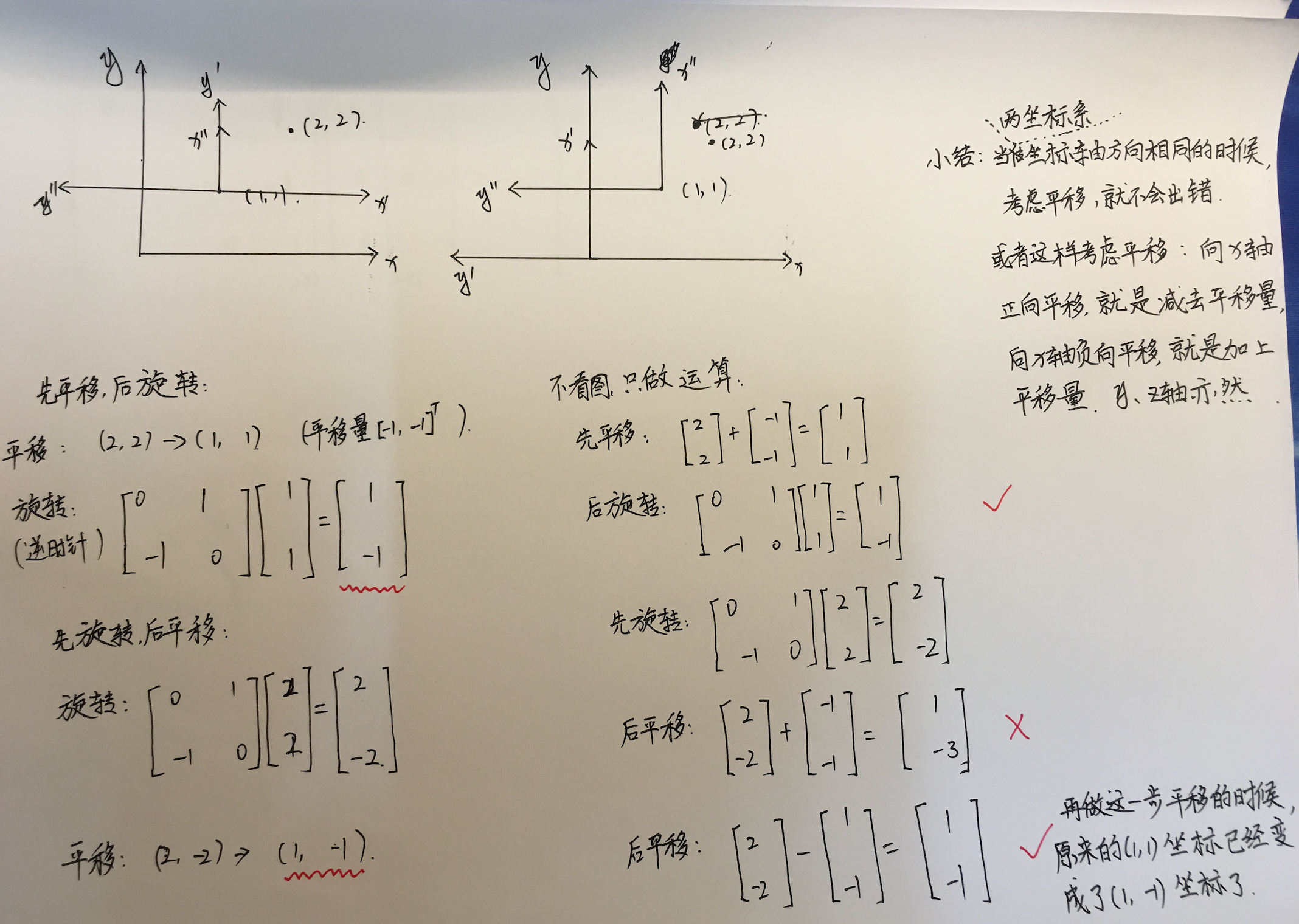
关于坐标旋转和平移的顺序,思考1:
思考2:
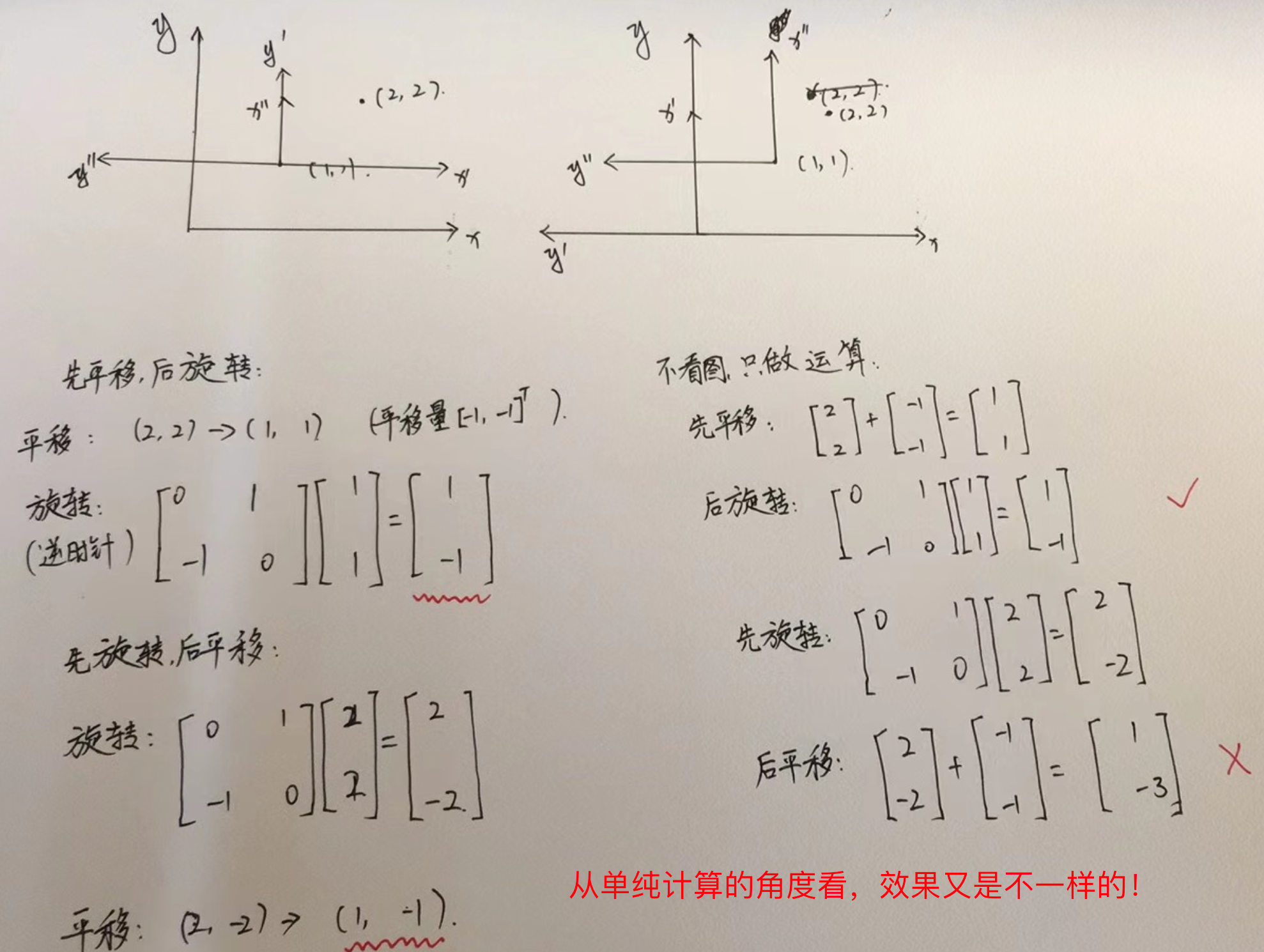
小结:
坐标系的平移和旋转,顺序不一样, 效果不一样。
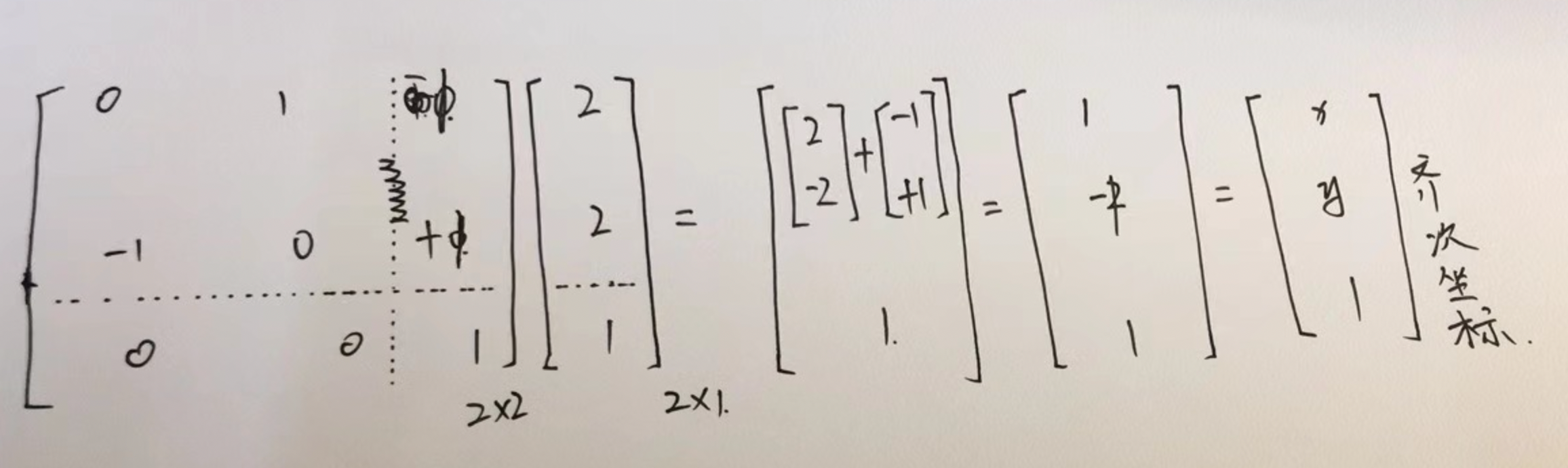
思考3:

把旋转和平移统一起来:
2.向量旋转
向量的旋转和坐标转换不一样。
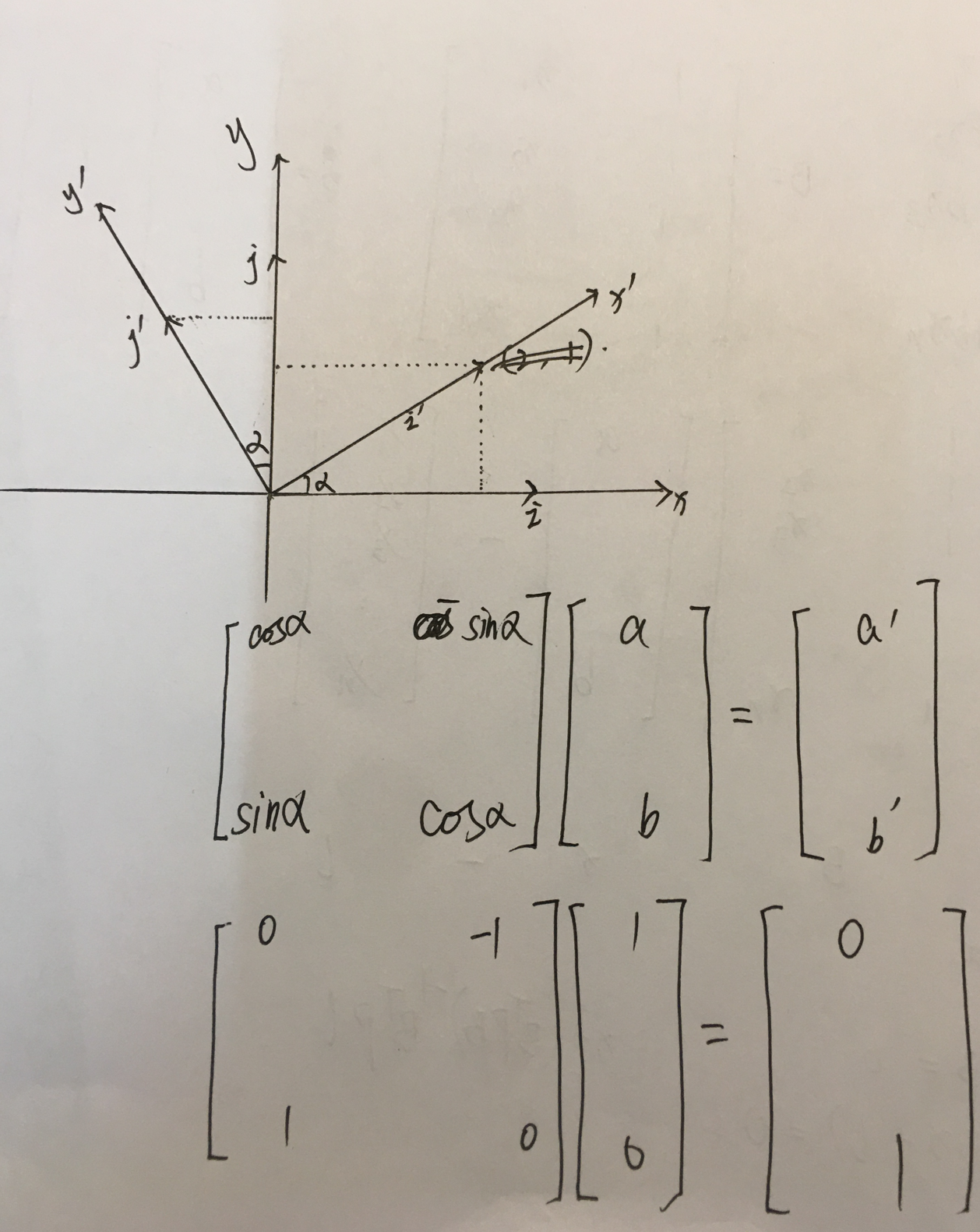
任意一个向量左乘上一个上图的旋转矩阵,相当于把向量逆时针旋转α°。此时向量旋转前后的坐标都是在原始坐标系x-y坐标系中的坐标。例如,当α=90°的时候,第二个旋转矩阵乘上向量:
![]()
会把这个向量旋转90°,变成:
![]() 。
。
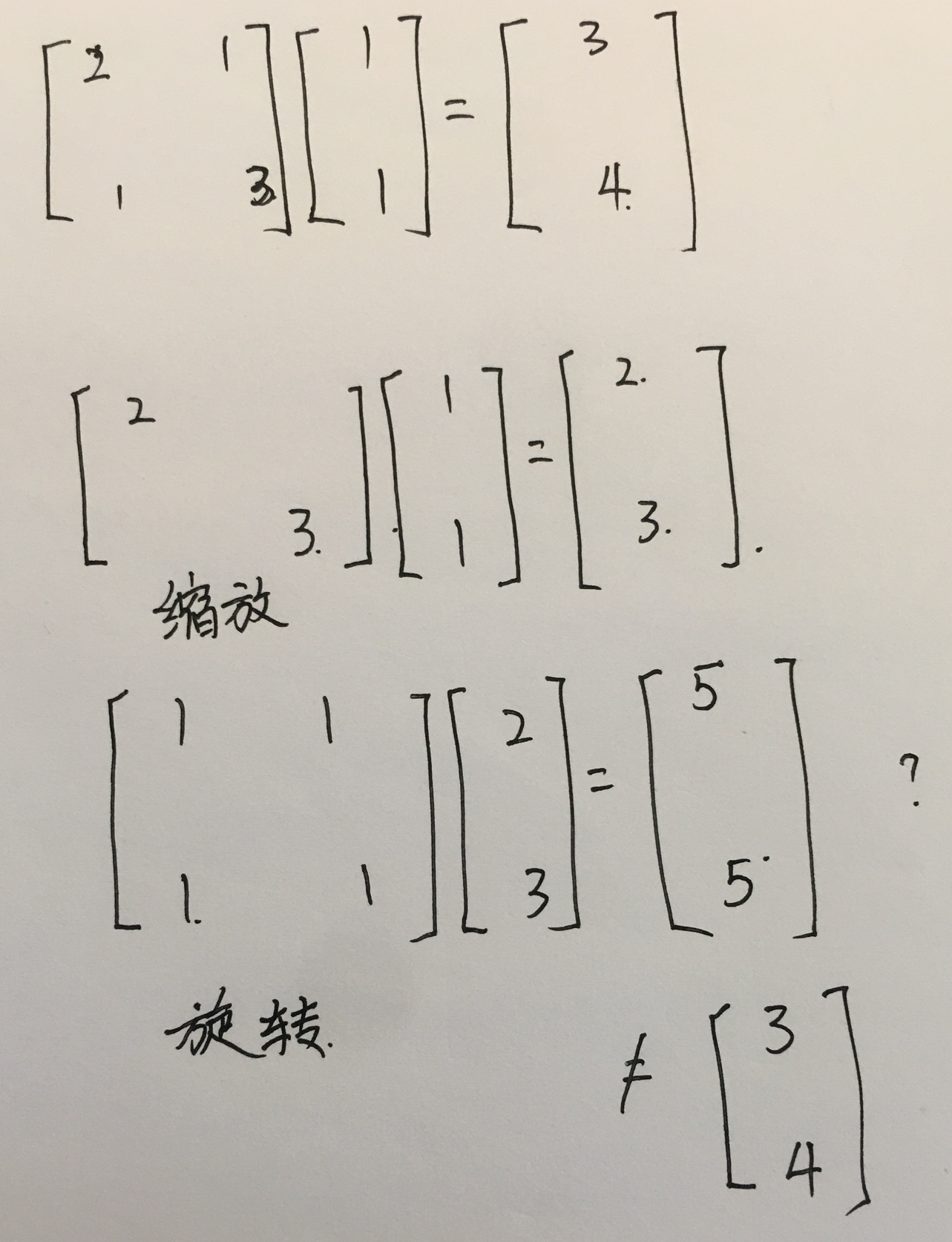
旋转矩阵的对角线上的元素和向量或图像的的缩放有关,即限制着向量或图像的的缩放,副对角线元素对和向量或图像的旋转有关,即限制着向量或图像的的旋转。
也可以这样考虑:这个旋转矩阵相当于是让原来的坐标系顺时针旋转90度,那么[1 0]T向量在新坐标系中的坐标是0 1]T
注解:
1.第一列元素的平方和应该等于1.
2.第一行的元素的平方和应该也等于1.


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律
2021-05-25 康斯坦丁·卡拉西奥多里
2021-05-25 Jabref安装及使用教程
2019-05-25 matlat保存矩阵数据
2019-05-25 Z+F激光扫描仪