

pointcnn
这篇论文先举例子解释了为什么卷积无法直接应用在点云数据上。
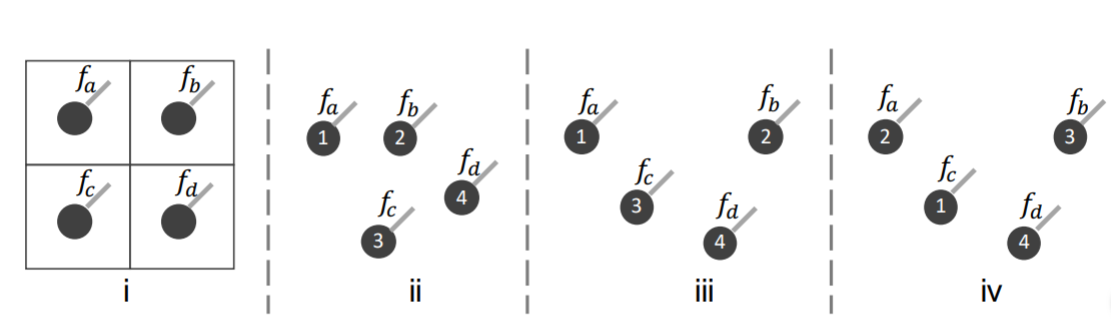
如图1, 传统的卷积是作用在2维图像数据上。图像中每个像素的顺序是固定的,也就是说数据是结构化存储的。直接使用conv2d就能从这种潜在的空间结构中获取信息。
而点云数据是点集,如果直接使用卷积会出现图中234多种情况
若直接使用卷积,则f2与f3的计算结果是相等的,但是从图中可知,23显示不同,这说明卷积无法获得点的空间信息
而f3与f4的计算结果不等,但是图3与图4是相同的点集,必须得到相同的计算结果才合理,这说明卷积无法适应点集的N!种排列。
在其他论文里,为了适应点云数据的这两种的特点采取的方式有体素化、3DCNN及PointNet提的对称操作(symmetric,这个翻译是我自己译的)
版权声明:本文为CSDN博主「Link2Link」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_15602569/article/details/79560614
卷积神经网络(Conv)能够很好利用原始数据的在空间上的局部相关性(Spatially-local correlation),这也正是卷积神经网络在各种分割或者分类任务中取得成功的关键。正是如此,作者设想是否能效仿卷积神经网络来很好的利用点云(Point Cloud)的空间上的局部相关性,这将在点云分割和分类上取得很大的成功。所以这篇文章的重点就在于怎么利用这种相关性。
版权声明:本文为CSDN博主「JMU-HSF」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_42956785/article/details/86586513
首先,根据采样得到的中心点,将全局坐标变为局部坐标,相当于分区。(点的数量如何确定?)
o 利用MLP将每个点变换到高维空间(一维卷积),得到F-sigma
o Concat特征F(输入的每个点的附加特征,比如color或者normal)和F-sigma,得到新的特征F*
o 对每个局部区域中的点使用MLP,得到变换矩阵X。这里可以注意一下,得到变换矩阵X的过程,输入是P'(一组坐标点),输出是变换矩阵X。文中的消除实验表明,X变换的确是有效果的
o 对特征F*使用X进行变换后,在进行传统的卷积(1维)。作者是希望通过X变换,把特征F*变成空间相关,也就是希望矩阵中相邻的在空间中也相邻,这样就可以像图像一样卷积了。
链接:https://zhuanlan.zhihu.com/p/89752154
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
https://blog.csdn.net/qq_33278989/article/details/80047252


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· winform 绘制太阳,地球,月球 运作规律
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· AI与.NET技术实操系列(五):向量存储与相似性搜索在 .NET 中的实现
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
2018-11-22 python清空tree.insert()