

使用Geomagic公司遥操作器Touch遥操作UR5e机器人
应导师要求,给了我一款遥操作器,需要通过该遥操作器来操作UR5e机器人。这款遥操作器Geomagic公司出品的Touch,外型大概长这个样子:
以下是大致思路:使用moveit控制UR5e,同时利用ROS接收Touch遥操作器的数据,然后进行一个ROS内的数据转发,发送给moveit。但是实际开发过程中还是有一些细节的问题。大致总结如下:
1,机器人在实际使用的过程当中,执行movel是需要规划时间的,而遥操作器的消息更新频率为1000HZ。通过和厂家沟通,该频率无法固定。所以,如果按照遥操作器的更新频率来执行movel,必然会遇到频繁的丢步或者延迟问题。体现在操作手感上给人的感觉就是很难使用,比较干涩。
解决办法:降低moveit运动规划器对于遥操作器的采样频率,以此降低运动次数,保证手感。
2,人手在手持遥操作器时会有自然的抖动,同时数据本身也会有小幅度抖动,这些是无法避免的。遥操作器不应该对这些微小抖动很敏感,需要进行数据的滤波处理。
解决办法:设置关键pose,类似于一个pose的滑动窗,对于pose中前后pose的位移使用轴角表示法进行表示,然后判断sigma的大小。如果sigma较大,则认为发生了一次“显著”的位移,才开始移动机器人,这样可以屏蔽较小的抖动。
3,遥操作器和真实机器人UR5e的工作空间对不上,如何处理?
本来是想对于xyz坐标乘以一定的系数,然后发给moveit以此来把两个工作空间对应起来。但是后面听从师兄的经验,捞出遥操作器的移动的位姿转移矩阵,然后取出xyz分量,其他置1,再发回给机器人,优化后感觉更加稳妥。
1:OpenHaptics 环境配置
首先是安装touch驱动。Touch驱动的下载地址:https://support.3dsystems.com/s/article/OpenHaptics-for-Linux-Developer-Edition-v34?language=en_US
在该页面下可以看到有 OpenHaptics 环境配置文件、touch 驱动文件以及驱动安装教程。
将环境配置文件openhaptics_3.4-0-developer-edition-amd64.tar.gz放到主目录下,解压
tar -xzvf openhaptics_3.4-0-developer-edition-amd64.tar.gz然后新开 ternimal ,cd 到解压后的文件夹openhaptics_3.4-0-developer-edition-amd64下,用sudo ./install安装
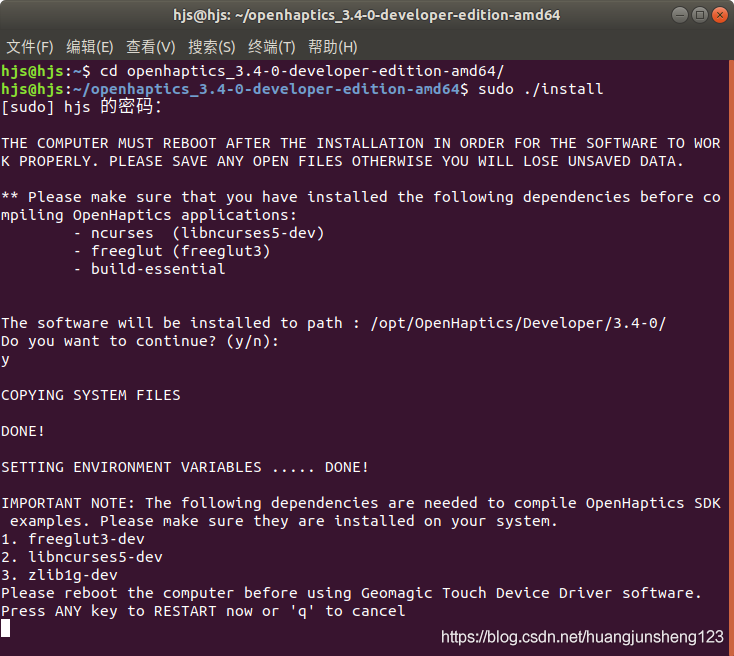
过程中需要按下任意键重启一次,重启后就安装好啦,安装路径在计算机的/opt目录下。
2:Geomagic Touch 驱动安装
Step1:在主目录下创建一个 touch_driver 文件夹,将下载好的驱动压缩包TouchDriver2019_2_15_Linux.tar.xz放在该文件夹下并解压;
Step2:进入解压缩之后的文件夹下(注意sudo提升权限)
将/touch_driver/TouchDriver2019_2_15_Linux/TouchDriver2019_2_14/bin文件夹下的Touch Setup和Touch diagnostics可执行文件复制到/usr/bin路径下;
将/touch_driver/TouchDriver2019_2_15_Linux/TouchDriver2019_2_14/usr/lib文件夹下的LibPhantomIOLib42.so复制到/usr/lib路径下;
Step3:安装 QT5,不用操作,因为 Ubuntu 18.04 已经安装了;
Step4:创建 3DSystems 目录用以配置和保存配置文件;
sudo mkdir /usr/share/3DSystemsStep5:设置环境变量 GTDD_HOME 映射以上创建的配置文件目录的路径。将以下环境变量添加到/etc/environment以使其永久化。可以直接将环境变量写入/etc/enviroment文件中并保存,在最后一行加入GTDD_HOME="/usr/share/3DSystems",但是注意,环境变量的生效需要先注销再重新登入ubuntu系统;
Step6:在/usr/share/3DSystems路径下创建 config 文件夹sudo mkdir config;
Step7:给Touch设备赋予权限,打开终端输入sudo chmod 777 /dev/ttyACM0;(注意!!!!!!每次重启以及插拔Touch时都应该重新输入该指令以赋予权限)
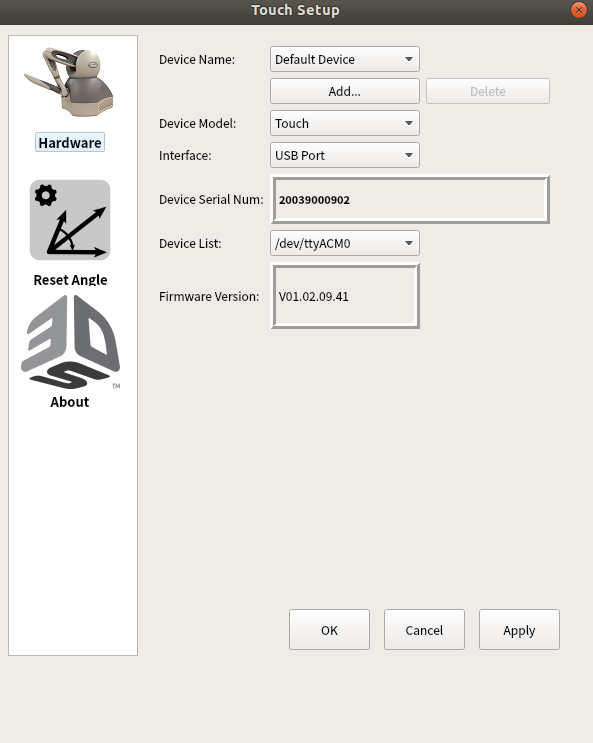
Step8:进入驱动的bin目录,输入sudo ./Touch_Setup 进入设置页面,看到自动读取出Touch设备的序列号以及相应信息之后,点击下方的Apply以及OK,会将相应设置写入之前创建的文件夹config之中。(注意这一步是需要sudo权限的)
之后执行sudo ./Touch_Diagnostic
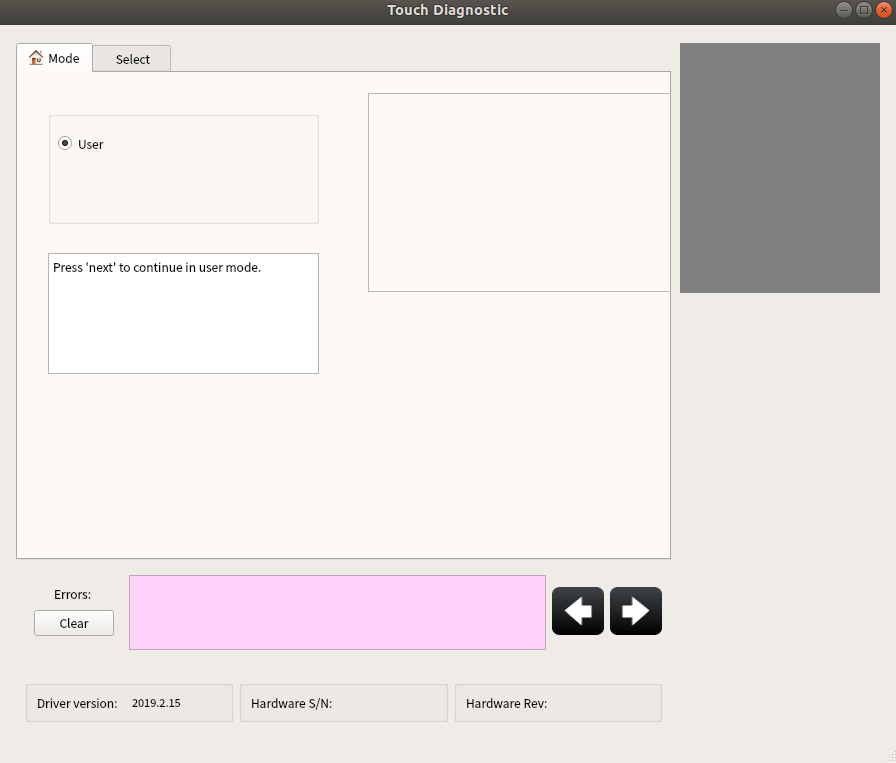
点击向右的黑色箭头
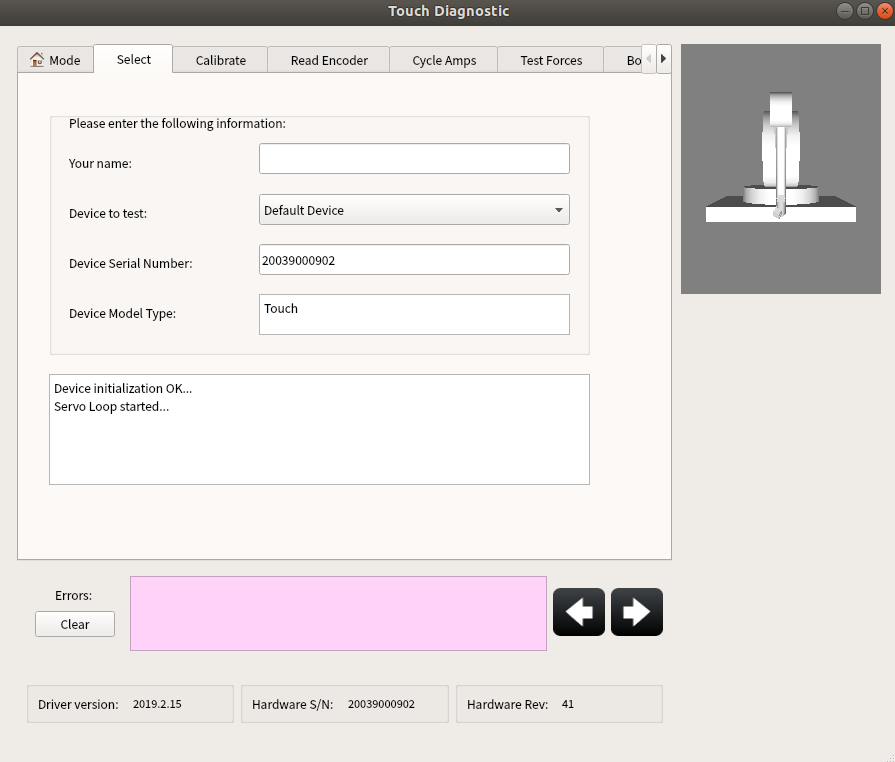
此时的Touch位姿应该和真实机器人位姿相同,如果不同,将Touch的手臂正确插入孔内,待听到卡的一声响声之后,再重新打开可执行文件,再检查位姿是否准确。
以上完成了Touch遥操作器的相关准备工作。
3:下载遥操作器ROS功能包Geomagic_Touch_ROS_Drivers-hydro
下载地址:https://github.com/bharatm11/Geomagic_Touch_ROS_Drivers
按照github页面显示,安装相应依赖。下载后,放入ros工作空间内,catkin_make。如果遇到报错,则检查相关依赖是否安装完整(按照提示,缺什么就下什么,也可以试一下rosdep install --from-paths src --ignore-src -r -y 一键安装一下依赖)
安装完毕后,打开终端输入roslaunch omni_common omni_state.launch,正常打开的界面应该没有报错,界面运行如下:
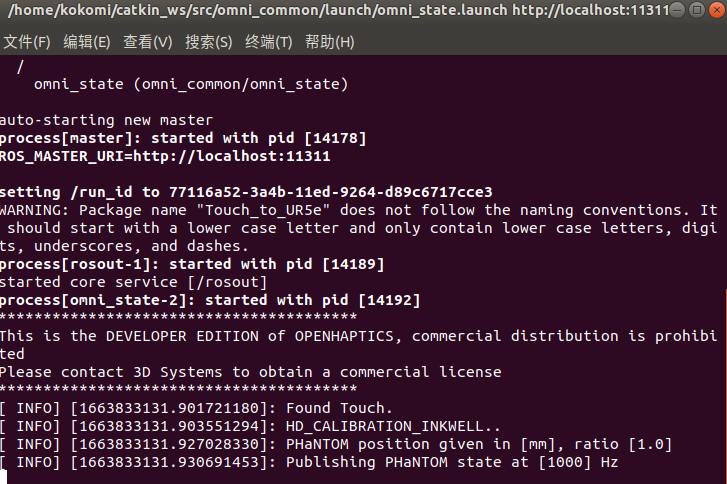
打开终端输入rostopic list可以看到多了几个前缀为/phantom的话题,输入rostopic echo ***可以打印该话题输出的信息。这也证明了我们遥操作器的功能包使用正常。
4:启动UR5e机器人,并使用moveit连接。
这一步网上教程很多,大家可以自行搜索。
5:启动遥操作器转发
这里我写了一个movel的demo,目前已上传gitee。地址为:https://gitee.com/TeamWIT-RoboMasterAI/demo/tree/master/ROS_Touch_UR5e_demo
可执行文件名为demotouch
这里为了解决上述的排除微小抖动的问题,我使用了一个过滤器,类似pose的滑动窗口,对前后两个关键时刻的pose以及当前pose进行一个维护。函数如下:
bool Posedatefilter(const geometry_msgs::Pose& p_keypose,const geometry_msgs::Pose& p_pose){
xyz_norm = sqrt(pow((p_keypose.position.x - p_pose.position.x),2) + pow((p_keypose.position.y - p_pose.position.y),2) + pow((p_keypose.position.z - p_pose.position.z),2));
msg2tf(p_keypose,tftrans1);
msg2tf(p_pose,tftrans2);
sigma1 = tftrans1.getRotation().angle(tftrans1.getRotation());
sigma2 = tftrans1.getRotation().angle(tftrans2.getRotation());
sigma_norm = sqrt(pow((sigma1-sigma2),2));
if(xyz_norm > 0.01)
{
return true;
}
else
return false;
}
该函数通过判断转换当前的位移为轴角表示,再通过判断标量xyz_norm来判断是否要将位移传给moveit。
void solvedtf(){
tf::Quaternion q;
tf::Vector3 t;
dtf.setIdentity();
t.setX(-(keyframe_PoseStamped.pose.position.x - keyframe_LastPoseStamped.pose.position.x));
t.setY(keyframe_PoseStamped.pose.position.y - keyframe_LastPoseStamped.pose.position.y);
t.setZ(-(keyframe_PoseStamped.pose.position.z - keyframe_LastPoseStamped.pose.position.z));
dtf.setOrigin(t);
tf2msg(start_tf * dtf,robot_states);
}
该函数实现了位移矩阵的传递。

