OrbSLAM2采集点云数据
因为条件限制,在Windows10平台下实现OrbSLAM2+Kinect2点云数据采集。
1. 遇到问题,启动运行没多久就跟丢了,有的地方哪怕轻微的旋转甚至不动都无法跟踪。
原因:相机的标定参数不对,fx和cx参数搞反了。其实应该从获取的稀疏点云中能够看出来有问题,稀疏点云的形状和分布就不对。
2.将每帧点云转换到世界坐标系的时候,需要注意点云的坐标系。Kinect SDK生成的点云的坐标系和自己根据图像生成的不一致。
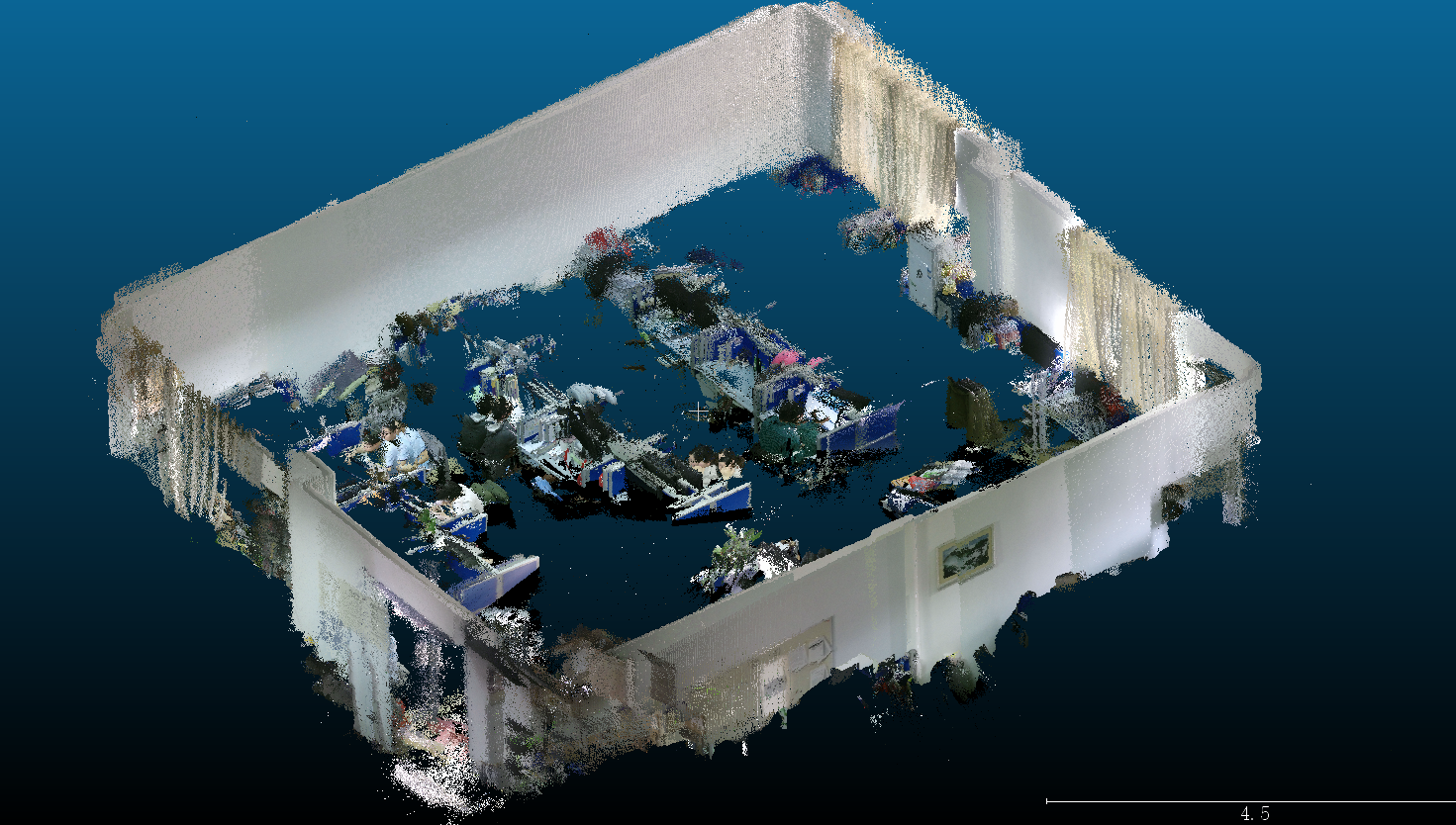
总结:
总的说来效果还是不错的,不过采集的点云还是存在重影。
思考可能是因为追踪和局部BA产生了误差累积,虽然做了整体优化,但是误差仍然表现在获取的点云中。
这样就和深度测量值也有关系,毕竟Kinect的距离精度还是比较低的。
同时采集轨迹的形状也有影响,如果轨迹在空间中的分布不均匀,运动不是匀速也会影响采集数据的质量。
作者:太一吾鱼水
文章未经说明均属原创,学习笔记可能有大段的引用,一般会注明参考文献。
欢迎大家留言交流,转载请注明出处。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号