[原创]NDT方法在SLAM中的应用
NDT概念
正态分布变换(Normal Distribution Transformation , NDT)
概率密度函数( Probability Density Function, PDF)
First proposed for two dimensional scan data registration by Biber & Strasser in 2003.
An NDT is described as a set of PDFs.
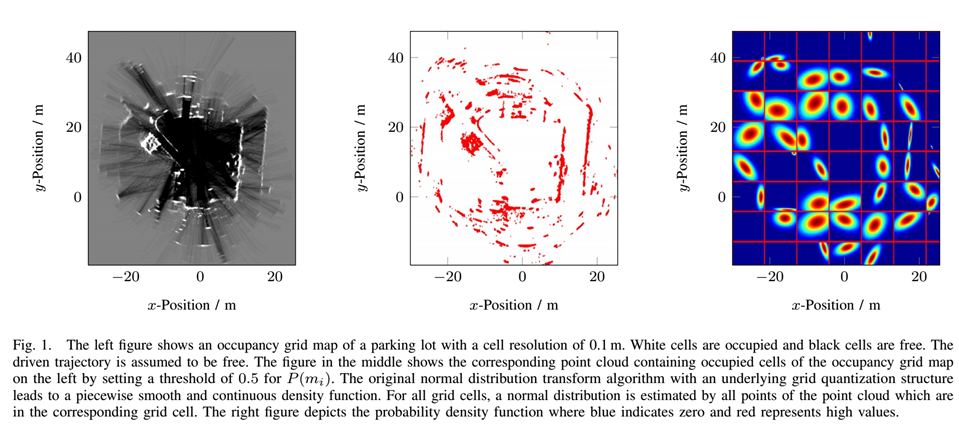
The first step of the algorithm is to subdivide the space occupied by the scan into a grid of cells (squares in the 2D case, or cubes in 3D).
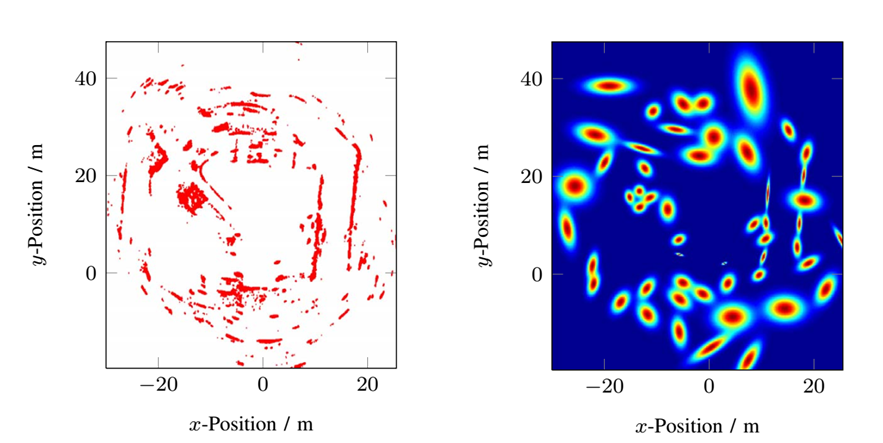
A PDF is computed for each cell, based on the point distribution within the cell.
NDT及其改进
将二维空间划分为固定大小网格,每个网格至少包括3个点(一般5个)
计算网格中点集的均值𝜇
计算网格中点集的协方差矩阵Σ
网格中的观测到点𝑥 的概率𝑝(𝑥 )服从正态分布𝑁(𝜇 ,Σ)
The PDF in each cell can be interpreted as a generative process for surface points 𝑥 ⃗ within the cell. In other words, it is assumed that the location of 𝑥 ⃗ has been generated by drawing from this distribution. Assuming that the locations of the reference scan surface points were generated by a D-dimensional normal random process, the likelihood of having measured 𝑥 is

标准的NDT方法
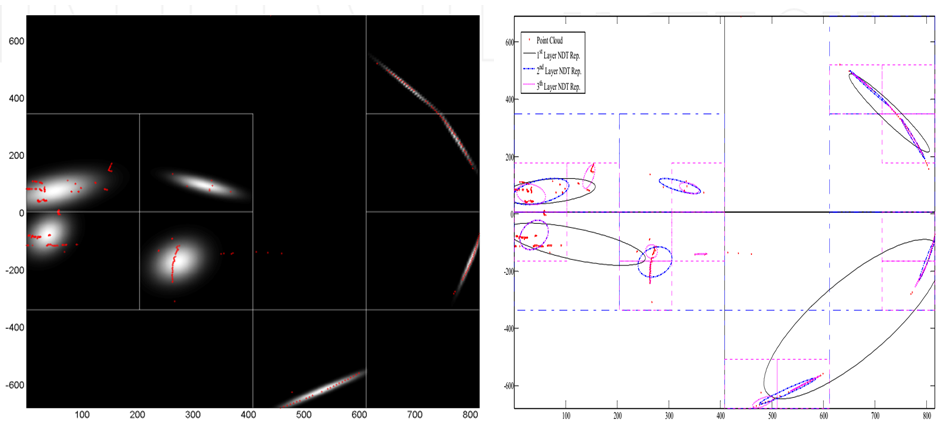
多尺度NDT
NDT tree

聚类NDT/区域生长NDT
Spatial Representation Models

其它
NDT interpolation
NDT格网划分后,每个方格或者体素中的点用正态分布描述,整帧扫描的分布并不连续。通过重叠NDT和内插NDT可以一定程度解决此问题。
NDT Occupancy Maps (NDT-OMs)
类似于占用概率地图,用NDT分布网格表达整幅地图。
Color-NDT
利用图像的颜色信息进行NDT匹配。
NDT-MCL
NDT匹配为蒙特卡洛方法提供初值。
基于NDT的扫描匹配

参考文献
[1] Peter Biber and Wolfgang Straßer. The normal distributions transform:A new approach to laser scan matching. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), pages 2743–2748, Las Vegas, USA, October 2003.
[2]Stoyanov, T. and M. Magnusson (2011). "On the Accuracy of the 3D Normal Distributions Transform as a Tool for Spatial Representation."
[3]Stoyanov, T.D., Reliable Autonomous Navigation in Semi-Structured Environments using the Three-Dimensional Normal Distributions Transform (3D-NDT). 2012.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号