[ROS]3 Linux编程练习
一起做RGB-SLAM(2)实验
第二讲 从图像到点云
http://www.cnblogs.com/gaoxiang12/p/4652478.html
1 exbot@ubuntu:~$ cd CodeLearn
2 exbot@ubuntu:~/CodeLearn$ cd Depth2PointCloud
3 exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ mkdir bin include lib src build
4 exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ touch CMakeLists.txt
5 exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ touch src/generatePointCloud.cpp
6 exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ touch src/CMakeLists.txt
7 exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ cd build
8 exbot@ubuntu:~/CodeLearn/Depth2PointCloud/build$ cmake ..
9 -- The C compiler identification is GNU
10 -- The CXX compiler identification is GNU
11 -- Check for working C compiler: /usr/bin/gcc
12 -- Check for working C compiler: /usr/bin/gcc -- works
13 -- Detecting C compiler ABI info
14 -- Detecting C compiler ABI info - done
15 -- Check for working CXX compiler: /usr/bin/c++
16 -- Check for working CXX compiler: /usr/bin/c++ -- works
17 -- Detecting CXX compiler ABI info
18 -- Detecting CXX compiler ABI info - done
19 -- checking for module 'eigen3'
20 -- found eigen3, version 3.2.7
21 -- Found eigen: /usr/include/eigen3
22 -- Boost version: 1.46.1
23 -- Found the following Boost libraries:
24 -- system
25 -- filesystem
26 -- thread
27 -- date_time
28 -- iostreams
29 -- serialization
30 -- checking for module 'openni-dev'
31 -- package 'openni-dev' not found
32 -- Found openni: /usr/lib/libOpenNI.so
33 -- Found libusb-1.0: /usr/include
34 -- looking for PCL_COMMON
35 -- Found PCL_COMMON: /usr/lib/libpcl_common.so
36 -- looking for PCL_OCTREE
37 -- Found PCL_OCTREE: /usr/lib/libpcl_octree.so
38 -- looking for PCL_IO
39 -- Found PCL_IO: /usr/lib/libpcl_io.so
40 -- Found PCL: /usr/lib/libboost_system-mt.so;/usr/lib/libboost_filesystem-mt.so;/usr/lib/libboost_thread-mt.so;pthread;/usr/lib/libboost_date_time-mt.so;/usr/lib/libboost_iostreams-mt.so;/usr/lib/libboost_serialization-mt.so;optimized;/usr/lib/libpcl_common.so;debug;/usr/lib/libpcl_common.so;optimized;/usr/lib/libpcl_octree.so;debug;/usr/lib/libpcl_octree.so;/usr/lib/libOpenNI.so;vtkCommon;vtkRendering;vtkHybrid;vtkCharts;optimized;/usr/lib/libpcl_io.so;debug;/usr/lib/libpcl_io.so;/usr/lib/libboost_system-mt.so;/usr/lib/libboost_filesystem-mt.so;/usr/lib/libboost_thread-mt.so;pthread;/usr/lib/libboost_date_time-mt.so;/usr/lib/libboost_iostreams-mt.so;/usr/lib/libboost_serialization-mt.so;/usr/lib/libOpenNI.so;vtkCommon;vtkRendering;vtkHybrid;vtkCharts
41 -- Configuring done
42 WARNING: Target "generate_pointcloud" requests linking to directory "/usr/lib". Targets may link only to libraries. CMake is dropping the item.
43 -- Generating done
44 -- Build files have been written to: /home/exbot/CodeLearn/Depth2PointCloud/build
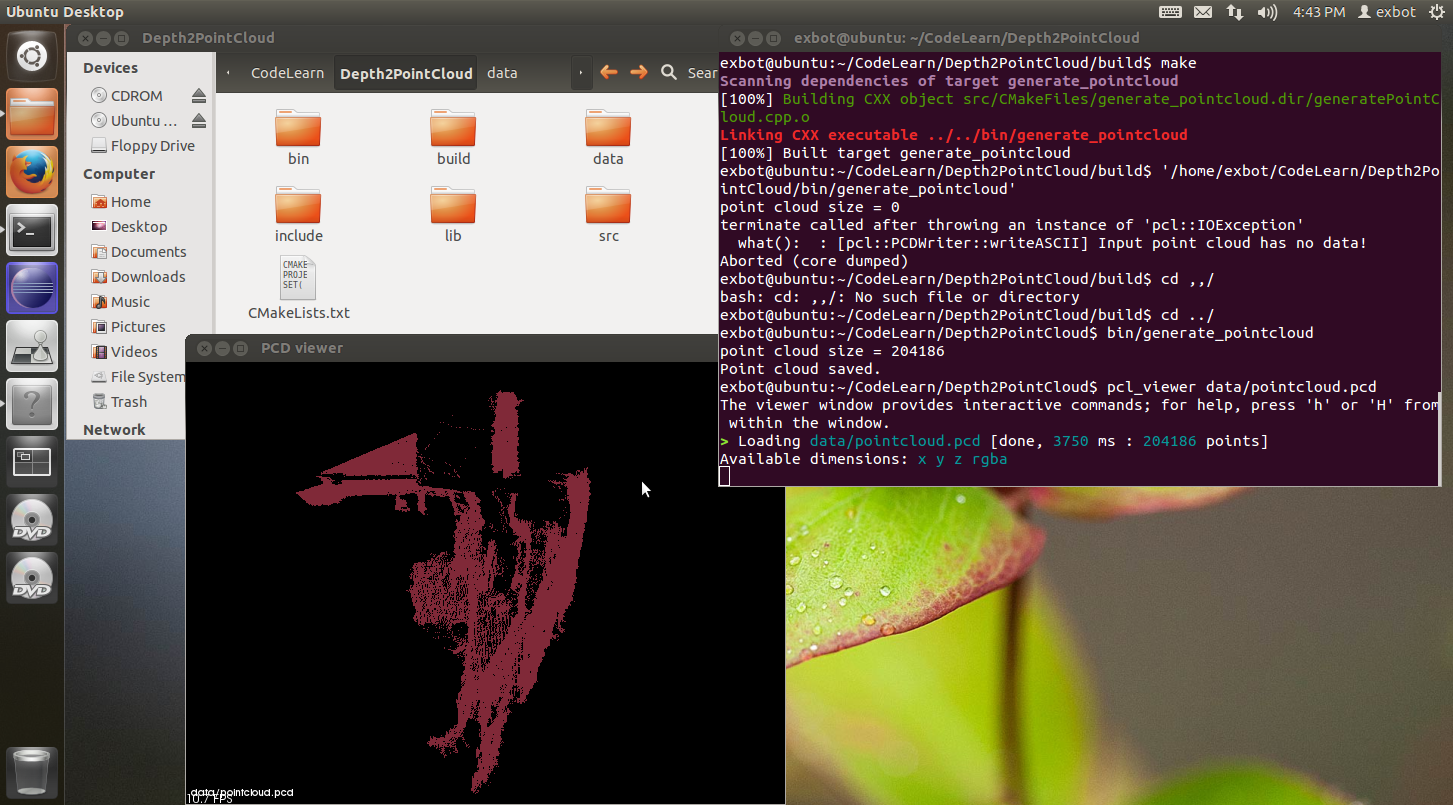
45 exbot@ubuntu:~/CodeLearn/Depth2PointCloud/build$ make
46 Scanning dependencies of target generate_pointcloud
47 [100%] Building CXX object src/CMakeFiles/generate_pointcloud.dir/generatePointCloud.cpp.o
48 Linking CXX executable ../../bin/generate_pointcloud
49 [100%] Built target generate_pointcloud
50 exbot@ubuntu:~/CodeLearn/Depth2PointCloud/build$ '/home/exbot/CodeLearn/Depth2PointCloud/bin/generate_pointcloud'
51 point cloud size = 0
52 terminate called after throwing an instance of 'pcl::IOException'
53 what(): : [pcl::PCDWriter::writeASCII] Input point cloud has no data!
54 Aborted (core dumped)
55 exbot@ubuntu:~/CodeLearn/Depth2PointCloud/build$ cd ,,/
56 bash: cd: ,,/: No such file or directory
57 exbot@ubuntu:~/CodeLearn/Depth2PointCloud/build$ cd ../
58 exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ bin/generate_pointcloud
59 point cloud size = 204186
60 Point cloud saved.
61 exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ pcl_viewer data/pointcloud.pcd
62 The viewer window provides interactive commands; for help, press 'h' or 'H' from within the window.
63 > Loading data/pointcloud.pcd [done, 3750 ms : 204186 points]
64 Available dimensions: x y z rgba
作者:太一吾鱼水
文章未经说明均属原创,学习笔记可能有大段的引用,一般会注明参考文献。
欢迎大家留言交流,转载请注明出处。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号