Intel® RealSense™ LiDAR camera L515使用体验
期待很久的Intel® RealSense™ LiDAR camera L515入手了,还入手了2个。
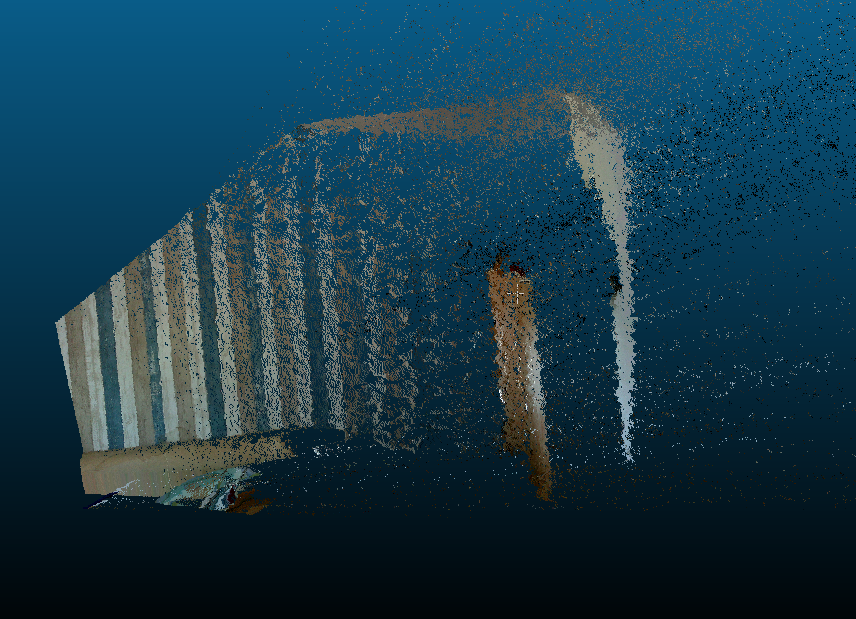
刚开始使用了之后感觉是两个字:稀烂!感觉上当了!看下面的数据,点云噪声极大。深度范围3m内还能用,超过3m就不行了。
看看它的参数,号称9m的测距,真是无语了。只能扫一扫桌面上的东西,本来还想用于室内建模的!感觉还不如Kinect2.
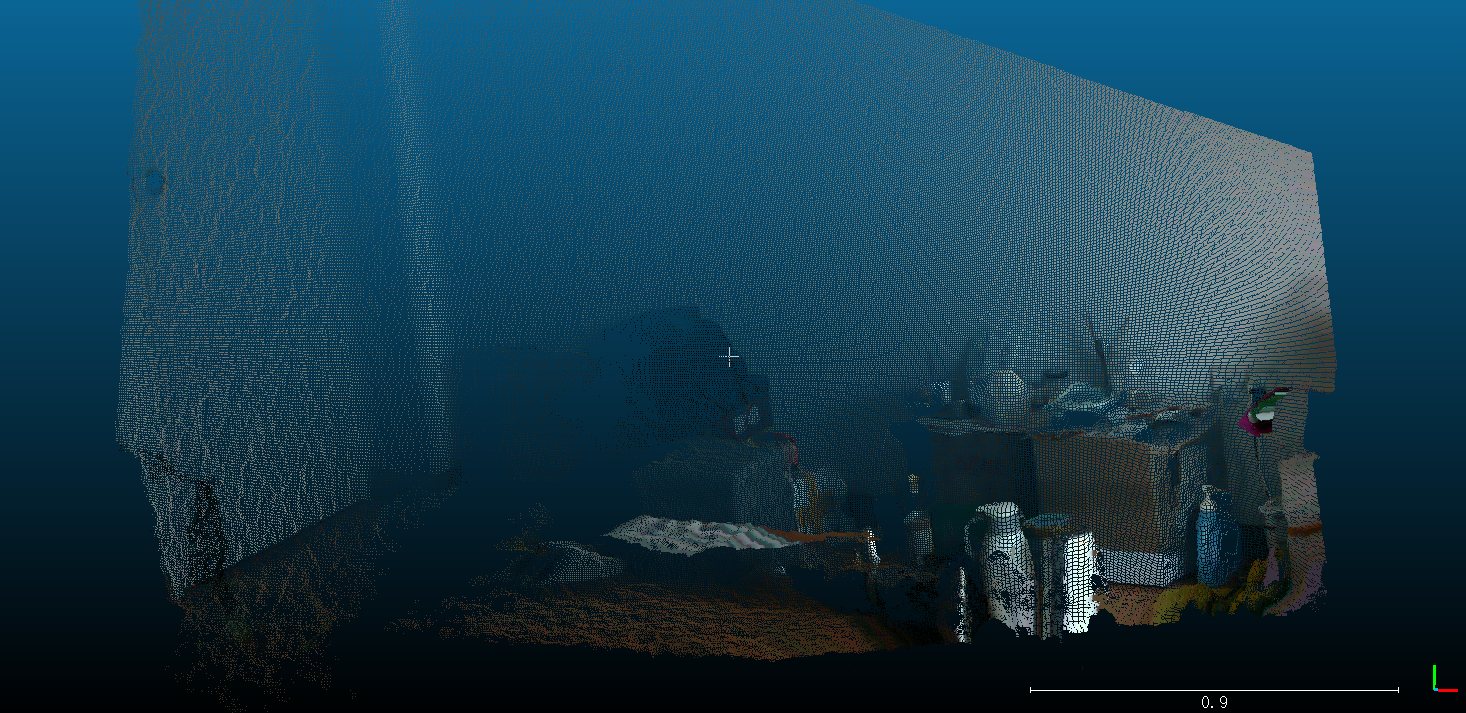
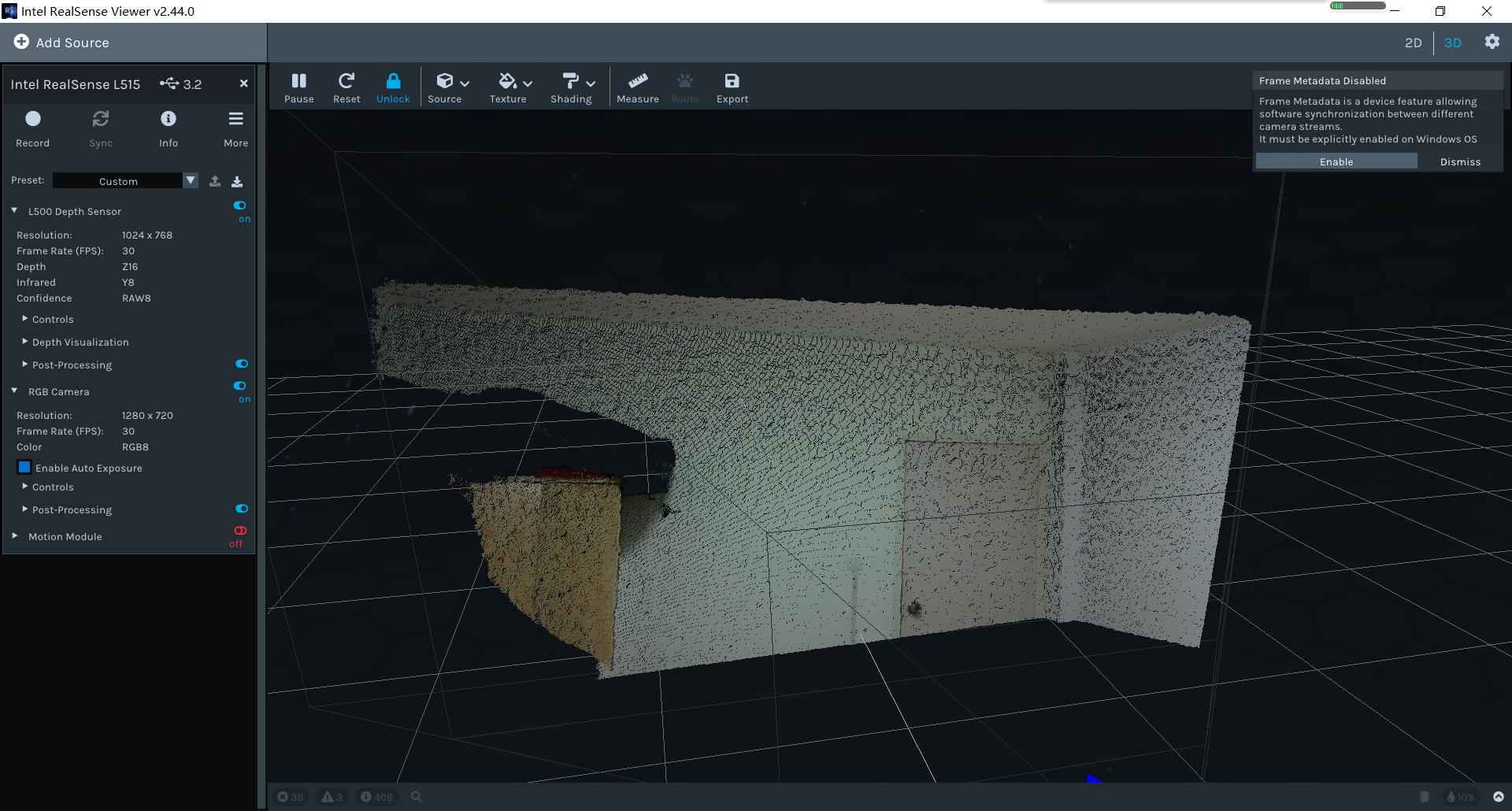
过了一段时间,重新插上测试,效果又好了很多!真是见鬼了!感觉5米内和Kinect2差不多,是因为傍晚光照的影响吗?
通过查看相关的视频资料,发现该设备受环境光影响较大。
开灯之后也没受影响!
姑且用用看吧!
SDK:https://github.com/IntelRealSense/librealsense/releases
作者:太一吾鱼水
文章未经说明均属原创,学习笔记可能有大段的引用,一般会注明参考文献。
欢迎大家留言交流,转载请注明出处。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号