
webgl(three.js)实现室内三维定位,3D定位,3D楼宇bim、实时定位三维可视化解决方案——第十四课(定位升级版)
序:
还是要抽出时间看书的,迷上了豆豆的作品,最近在看《天幕红尘》,书中主人公的人生价值观以及修为都是让我惊为叹止。很想成为那样的人,但是再看看自己每天干的事,与时间的支配情况,真是十分的汗颜。除了为了生活所必须的工作时间外,还有大部分零散的时间不是给了短视频,就是给了短讯文章,简讯媒介,不说是毫无意义吧,但也着实是浮躁虚夸了。
用豆豆作品里的话术,"透视社会依次有三个层面:技术、制度和文化。小到一个人,大到一个国家一个民族,任何一种命运归根到底都是那种文化属性的产物"。 我终究是干技术的,还是无法洞察其中奥义,只是熟悉了几门糊口的技巧而已,究竟其本质便无所得之了,或者说依然没找到那安身立命的意义。长路漫漫,且寻着吧。人生也许也像某个技术门类,需要不断的回顾,记录,总结。才能真正发现一些实质性的东西。究竟涅槃,如来?
本想谈技术,话题终究是扯远了,但总归要扯点啥吧,练练文笔也好,述述心态也罢,反正也少有人看写在前面的废话,这任算是,无伤技术之大雅,无关文章之紧要了。
还是闲话少序,切入正题吧。
前言:
前面的课程介绍过定位相关的技术解决方案,《webgl(three.js)实现室内定位,楼宇bim、实时定位三维可视化解决方案——第五课》 ,从硬件到可视化,都已经比较全面的讲述了一遍,这边文章相当于那篇文件的一个改进版本,主要是在可视化呈现方面,根据具体的实施项目,在可视化方面做一个比较全面的技术剖析。
关于硬件采集端技术,因为精度要求不高,任然采用的是:低功耗有源RFID+读卡器基地器+智能分析。
关于室内定位市场前景,那篇文章也做了一些分析,这里不做赘述。
技术交流 1203193731@qq.com
交流微信:

如果你有什么要交流的心得 可邮件我或者微我
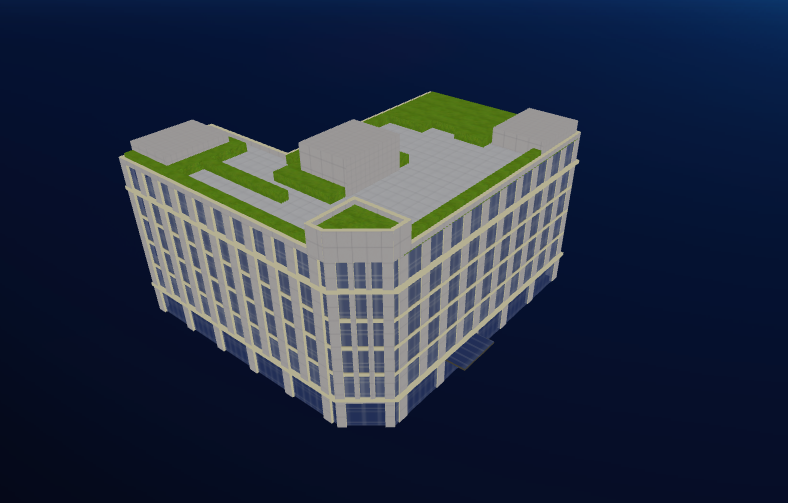
一、整体效果
还是先看整体效果,再探具体实现技术的究竟

上图展示整体园区以及周边的科技感效果。
上图展示近距离整体园区建设风貌。
二、功能展示
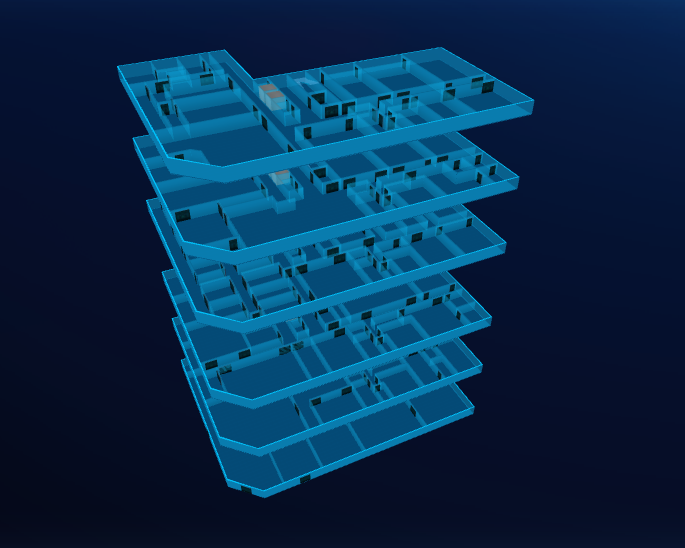
2.1、展开楼层
楼层展开实现比较简单,首先再建模的时候讲究分离模型,不能讲楼层内部,楼层外墙一股脑做成一个模型,需要讲模型分解,分开建模,
实现楼层展开就比较方便了,只需要控制外墙模型隐藏,然后控制每个楼层的的高度位置就可以。
实现代码如下:
ModelBussiness.prototype.tempNameList = []; ModelBussiness.prototype.tempDataList = []; ModelBussiness.prototype.videoDataCache = {}; ModelBussiness.prototype.showFloorState = "close"; //显示楼层内部情况 ModelBussiness.prototype.showBuildFloors = function (buildnub, callBack) { var _this = this _this.showFloorState = "open"; var builds = WT3DObj.commonFunc.findObjectsByNames(["wjwb1_232", "wjwbuilds_55"]); //隐藏大楼 WT3DObj.commonFunc.setSkinColorByname("wjwb1_232", 0x00ffff); WT3DObj.commonFunc.changeCameraPosition({ x: 3652.5144280174954, y: 990.805706980618, z: 5107.394022507952 }, { x: 1914.4771268074287, y: -723.8717024746979, z: 2181.6118222317314 }, 500, function () { }); WT3DModel.commonFunc.changeObjsOpacity(builds, 1, 0.1, 500, function (obj) { var _obj = WT3DObj.commonFunc.findObject("wjwb1_232"); if (typeof (_obj.oldPositionY) == 'undefined') { _obj.oldPositionY = _obj.position.y } _obj.position.y = 1000000; _obj.visible = false; WT3DObj.commonFunc.changeCameraPosition({ x: 3247.2796000738454, y: 2191.5405041410445, z: 5229.077446579187 }, { x: 2719.261239206996, y: 80.49406057323252, z: 3015.8739289848077 }, 500, function () { }); var names = ["floor_1", "floor_2", "floor_3", "floor_4", "floor_5", "floor_6"]; var floors = WT3DObj.commonFunc.findObjectsByNames(names); modelBussiness.openFloors(floors, function () { if (callBack) { callBack(); } }); }); } //隐藏楼层内部情况 ModelBussiness.prototype.hideBuildFloors = function (buildnub, callBack) { var _this = this _this.showFloorState = "close"; var names = ["floor_1", "floor_2", "floor_3", "floor_4", "floor_5", "floor_6"]; var builds = WT3DObj.commonFunc.findObjectsByNames(["wjwb1_232", "wjwbuilds_55"]); var floors = WT3DObj.commonFunc.findObjectsByNames(names); this.closeFloors(floors, function () { $.each(builds, function (_index, _obj) { if (typeof (_obj.oldPositionY) == 'undefined') { _obj.oldPositionY = _obj.position.y } _obj.position.y = _obj.oldPositionY; _obj.visible = true; }) WT3DModel.commonFunc.changeObjsOpacity(builds, 0, 1, 1000, function (obj) { WT3DObj.commonFunc.setSkinColorByname("wjwb1_232", 0x000000); }); if (callBack) { callBack(); } }) } //显示楼层 ModelBussiness.prototype.openFloors = function (floors, callBack) { //显示楼层 $.each(floors, function (_index, _obj) { if (typeof (_obj.oldPositionY) == 'undefined') { _obj.oldPositionY = _obj.position.y } if (_obj.position.y > 100000) { _obj.position.y -= 1000000; } _obj.visible = true; }); setTimeout(function () { $.each(floors, function (_index, _obj) { //展开楼层 _obj.floorPosition = _obj.position.y; var floor = parseInt(_obj.name.split("_")[1]); height = (floor - 1) * 300 +50; new Tn(_obj.position).to({//补充间隔动画 y: height }, 500).start(); }); setTimeout(function () { if (callBack) { callBack() } },600); }, 500) }
2.2、绘制定位路径
绘制定位路径,相比楼层展开要复杂一些,这里要用到定位设备与虚拟模型之间的关联与绑定,然后标记跟着模型运动
主要分为以下几步:
第一、建模
第二、建立虚拟模型,绑定设备id
第三、数据id转换为模型id
第四、寻址,找到对应的虚拟模型列表、并且获取各自位置
第五、根据位置画线、移动标签
三、具体实现
3.1、创建周遭环境模型,特效模型等
建模代码如下:
[{"show":true,"uuid":"","name":"cube2_6","objType":"cube2","length":200,"width":200,"height":200,"x":0,"y":200,"z":0,"style":{"skinColor":16777215,"skin":{"skin_up":{"skinColor":16777215,"imgurl":"../../img/3dImg/rack_inside.jpg","materialType":"basic","side":1,"opacity":1},"skin_down":{"skinColor":16777215},"skin_fore":{"skinColor":16777215},"skin_behind":{"skinColor":16777215},"skin_left":{"skinColor":16777215},"skin_right":{"skinColor":16777215}}},"showSortNub":6},{"show":true,"uuid":"","name":"wjwbuilds_270","objType":"GroupObj","scale":{"x":1,"y":1,"z":1},"position":{"x":0,"y":0,"z":0},"rotation":[{"direction":"x","degree":0}],"modelGroupName":"wjwbuilds","modelSrc":"../js/msj3D/sourse/customModels/models/wjwbuilds.json?v1.50.4428873971970626","srcType":"filePath","showSortNub":270}]
3.2、创建外墙模型
单独创建需要裂解的大楼外墙模型,具体如下:
[{"show":true,"uuid":"","name":"cube2_6","objType":"cube2","length":200,"width":200,"height":200,"x":0,"y":200,"z":0,"style":{"skinColor":16777215,"skin":{"skin_up":{"skinColor":16777215,"imgurl":"../../img/3dImg/rack_inside.jpg","materialType":"basic","side":1,"opacity":1},"skin_down":{"skinColor":16777215},"skin_fore":{"skinColor":16777215},"skin_behind":{"skinColor":16777215},"skin_left":{"skinColor":16777215},"skin_right":{"skinColor":16777215}}},"showSortNub":6},{"show":true,"uuid":"","name":"wjwb1_7","objType":"GroupObj","scale":{"x":1,"y":1,"z":1},"position":{"x":0,"y":0,"z":0},"rotation":[{"direction":"x","degree":0}],"modelGroupName":"wjwb1","modelSrc":"../js/msj3D/sourse/customModels/models/wjwb1.json?v1.50.7245325959034448","srcType":"filePath","showSortNub":7}]
3.3、其它细节楼宇模型

作为辅助美观模型,单独创建模型如下:
[{"show":true,"uuid":"","name":"wjwb2_38","objType":"GroupObj","scale":{"x":1,"y":1,"z":1},"position":{"x":0,"y":0,"z":0},"rotation":[{"direction":"x","degree":0}],"modelGroupName":"wjwb2","modelSrc":"../js/msj3D/sourse/customModels/models/wjwb2.json?v1.50.2327047742615571","srcType":"filePath","showSortNub":38}]
3.4、楼层模型
各楼层模型单独创建,便于控制与展示
[{"show":true,"uuid":"","name":"wjwf1_40","objType":"GroupObj","scale":{"x":1,"y":1,"z":1},"position":{"x":0,"y":0,"z":0},"rotation":[{"direction":"x","degree":0}],"modelGroupName":"wjwf1","modelSrc":"../js/msj3D/sourse/customModels/models/wjwf1.json?v1.50.13740666293081194","srcType":"filePath","showSortNub":40}]
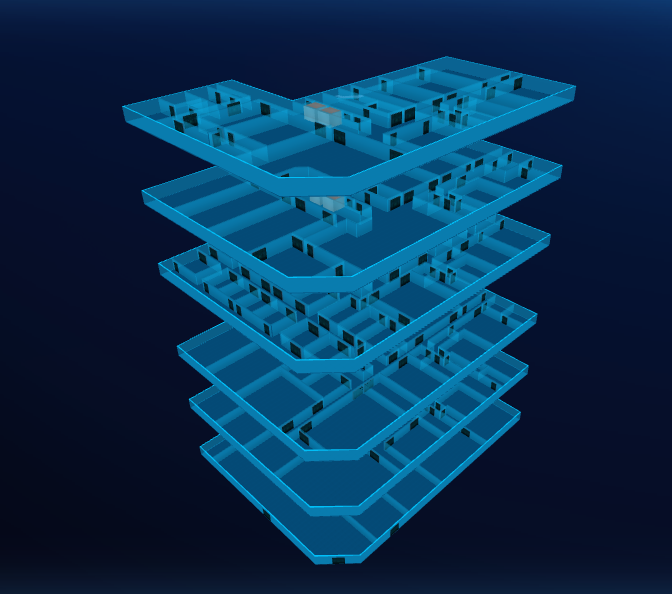
多角度观察一下楼层模型:
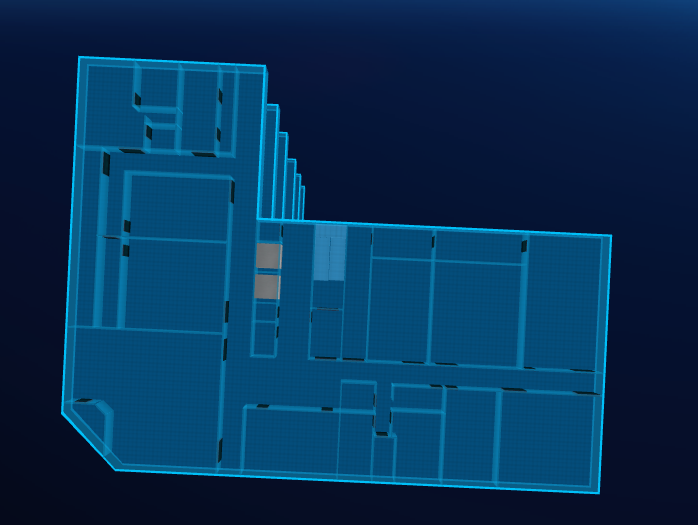
单元测试楼宇模型裂解效果
四、定位详解
本想放到第三章一起讲解,但这部分实现比较重要,所以单独一章讲解

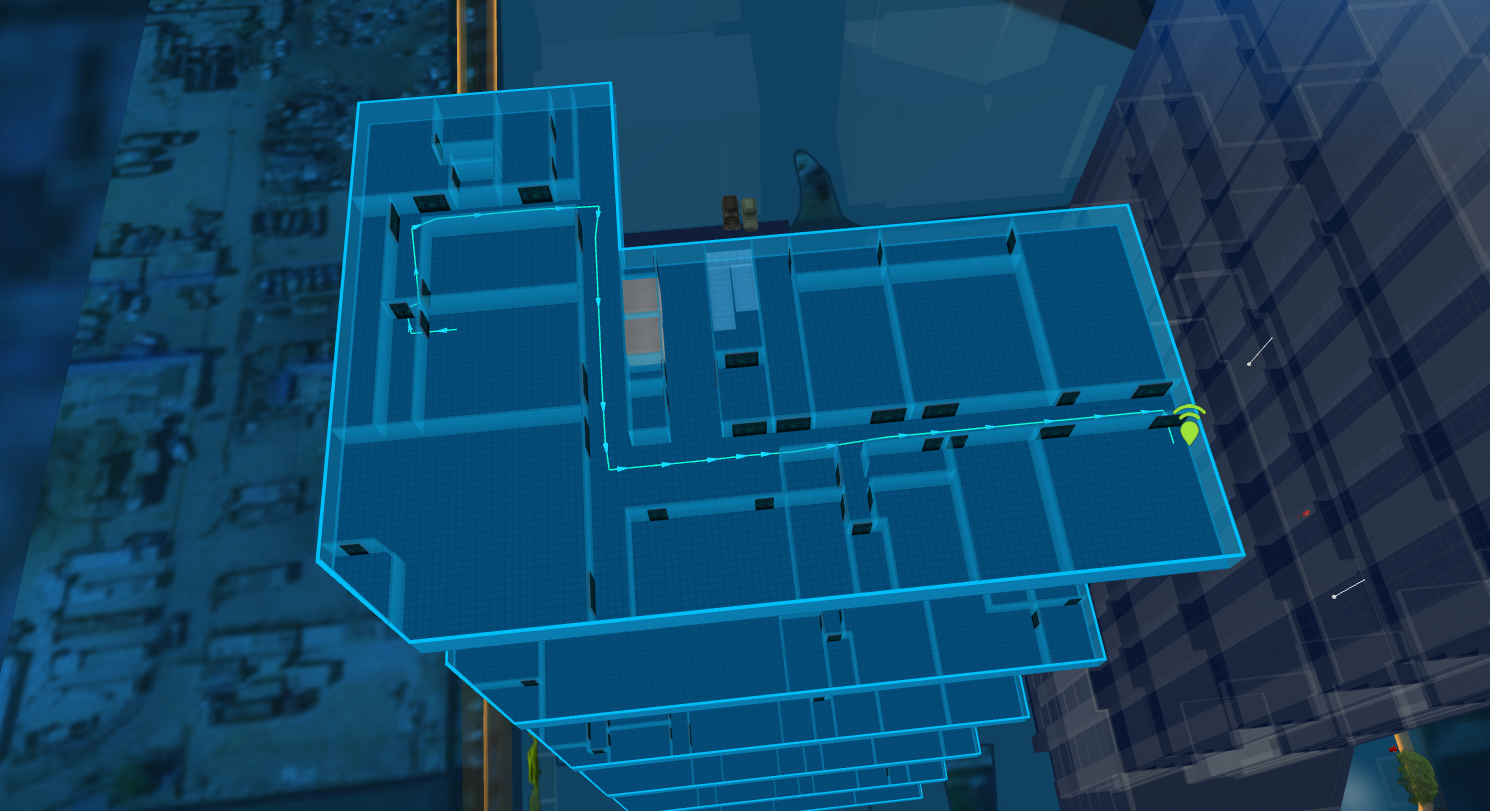
如上图,粉色的点位表示房间门内的辅助点,亮绿色的点位表示设备所对应的门外辅助点
我们这里只需要绑定门外的辅助点到对应的设备就可以
当再某处停留事件过长,我们通常判断已经进入房间,直接讲门外门内两个点链接,即可。
4.1、存储虚拟点位
//使用二叉树储存法,将辅助点与设备id进行绑定。
{ "cp": { "x": 2898.062281840033, "y": 726.9857194504245, "z": 4474.268417657025 },
"ct": { "x": 2919.5843654655655, "y": -325.13303496900545, "z": 3386.2841814639646 }, line: [2010, 2002, 2016, 2028, 2018, 2032, ["h1", 2038], 2026, 2022, 2036, 2020, [2000, 2034], 2004, 2014],//二叉树存储数据 Points: [{ "name": "f2d_2010", "position": { "x": 2824.843, "y": 82.926, "z": 3874.214 } }, { "name": "f2d_2016", "position": { "x": 2824.843, "y": 82.926, "z": 3977.133 } }, { "name": "f2d_2028", "position": { "x": 2824.843, "y": 82.926, "z": 4010.544 } }, { "name": "f2d_2018", "position": { "x": 2824.843, "y": 82.926, "z": 4084.157 } }, { "name": "f2d_2032", "position": { "x": 2824.843, "y": 82.926, "z": 4110.372 } }, { "name": "f2d_2038", "position": { "x": 2824.843, "y": 82.926, "z": 4191.56 } }, { "name": "f2d_h1", "position": { "x": 2824.843, "y": 82.926, "z": 4145.947 } }, { "name": "f2d_2026", "position": { "x": 2894.811, "y": 82.926, "z": 4142.355 } }, { "name": "f2d_2022", "position": { "x": 2929.456, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2036", "position": { "x": 2993.039, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2020", "position": { "x": 3127.172, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2000", "position": { "x": 3138.358, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2014", "position": { "x": 3196.413, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2004", "position": { "x": 3159.209, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2034", "position": { "x": 3140.007, "y": 82.926, "z": 4238.683 } }, { "name": "f2d_2010_room", "position": { "x": 2794.836, "y": 82.926, "z": 3874.214 } }, { "name": "f2d_2002", "position": { "x": 2820.207, "y": 82.926, "z": 3901.037 } }, { "name": "f2d_2002_room", "position": { "x": 2794.657, "y": 82.926, "z": 3901.037 } }, { "name": "f2d_2016_room", "position": { "x": 2795.467, "y": 82.926, "z": 3977.133 } }, { "name": "f2d_2028_room", "position": { "x": 2790.713, "y": 82.926, "z": 4010.544 } }, { "name": "f2d_2018_room", "position": { "x": 2797.472, "y": 82.926, "z": 4074.339 } }, { "name": "f2d_2032_room", "position": { "x": 2798.134, "y": 82.926, "z": 4110.372 } }, { "name": "f2d_2038_room", "position": { "x": 2796.368, "y": 82.926, "z": 4191.56 } }, { "name": "f2d_2026_room", "position": { "x": 2894.811, "y": 82.926, "z": 4076.308 } }, { "name": "f2d_2022_room", "position": { "x": 2929.456, "y": 82.926, "z": 4107.921 } }, { "name": "f2d_2036_room", "position": { "x": 2993.039, "y": 82.926, "z": 4103.112 } }, { "name": "f2d_2020_room", "position": { "x": 3127.172, "y": 82.926, "z": 4110.79 } }, { "name": "f2d_2000_room", "position": { "x": 3138.358, "y": 82.926, "z": 4156.895 } }, { "name": "f2d_2004_room", "position": { "x": 3159.209, "y": 82.926, "z": 4156.794 } }, { "name": "f2d_2014_room", "position": { "x": 3196.413, "y": 82.926, "z": 4157.111 } }, { "name": "f2d_2034_room", "position": { "x": 3165.756, "y": 82.926, "z": 4238.683 } }] }
//存储辅助点模型位置到数组中,方便快速查找。
[{ "name": "f2d_2010", "position": { "x": 2824.843, "y": 82.926, "z": 3874.214 } }, { "name": "f2d_2016", "position": { "x": 2824.843, "y": 82.926, "z": 3977.133 } }, { "name": "f2d_2028", "position": { "x": 2824.843, "y": 82.926, "z": 4010.544 } }, { "name": "f2d_2018", "position": { "x": 2824.843, "y": 82.926, "z": 4084.157 } }, { "name": "f2d_2032", "position": { "x": 2824.843, "y": 82.926, "z": 4110.372 } }, { "name": "f2d_2038", "position": { "x": 2824.843, "y": 82.926, "z": 4191.56 } }, { "name": "f2d_h1", "position": { "x": 2824.843, "y": 82.926, "z": 4145.947 } }, { "name": "f2d_2026", "position": { "x": 2894.811, "y": 82.926, "z": 4142.355 } }, { "name": "f2d_2022", "position": { "x": 2929.456, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2036", "position": { "x": 2993.039, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2020", "position": { "x": 3127.172, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2000", "position": { "x": 3138.358, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2014", "position": { "x": 3196.413, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2004", "position": { "x": 3159.209, "y": 82.926, "z": 4137.219 } }, { "name": "f2d_2034", "position": { "x": 3140.007, "y": 82.926, "z": 4238.683 } }, { "name": "f2d_2010_room", "position": { "x": 2794.836, "y": 82.926, "z": 3874.214 } }, { "name": "f2d_2002", "position": { "x": 2820.207, "y": 82.926, "z": 3901.037 } }, { "name": "f2d_2002_room", "position": { "x": 2794.657, "y": 82.926, "z": 3901.037 } }, { "name": "f2d_2016_room", "position": { "x": 2795.467, "y": 82.926, "z": 3977.133 } }, { "name": "f2d_2028_room", "position": { "x": 2790.713, "y": 82.926, "z": 4010.544 } }, { "name": "f2d_2018_room", "position": { "x": 2797.472, "y": 82.926, "z": 4074.339 } }, { "name": "f2d_2032_room", "position": { "x": 2798.134, "y": 82.926, "z": 4110.372 } }, { "name": "f2d_2038_room", "position": { "x": 2796.368, "y": 82.926, "z": 4191.56 } }, { "name": "f2d_2026_room", "position": { "x": 2894.811, "y": 82.926, "z": 4076.308 } }, { "name": "f2d_2022_room", "position": { "x": 2929.456, "y": 82.926, "z": 4107.921 } }, { "name": "f2d_2036_room", "position": { "x": 2993.039, "y": 82.926, "z": 4103.112 } }, { "name": "f2d_2020_room", "position": { "x": 3127.172, "y": 82.926, "z": 4110.79 } }, { "name": "f2d_2000_room", "position": { "x": 3138.358, "y": 82.926, "z": 4156.895 } }, { "name": "f2d_2004_room", "position": { "x": 3159.209, "y": 82.926, "z": 4156.794 } }, { "name": "f2d_2014_room", "position": { "x": 3196.413, "y": 82.926, "z": 4157.111 } }, { "name": "f2d_2034_room", "position": { "x": 3165.756, "y": 82.926, "z": 4238.683 } }]
4.2、具体实现画线定位
实现画线定位是利用设备id找到对应辅助点,然后将辅助点链接起来的方式
定位标签移动,使用补间动画移动效果即可。
//显示路径 function drawLineFunc(floor, start, end, timeLong, startOut, endIn) { //drawLineDataList.push({ // floor: 楼层, // start: 开始设备点id, // end: 结束设备点id, // timeLong: 移动时长, // startOut: 是否是从房间里出来, // endIn: 是否进入房间 //}); WT3DObj.commonFunc.changeCameraPosition(ConfigData["f" + floor].cp, ConfigData["f" + floor].ct, 300, function () { }); //生成路径节点数组 var startindex = -1; var startindex2 = -1; var endindex = -1; var endindex2 =-1; var linedata = ConfigData["f" + floor].line; $.each(linedata, function (_index, _obj) { if (_obj instanceof Array) { $.each(_obj, function (_cindex, _cobj) { if (_cobj + "" == start + "") { startindex = _index; startindex2 = _cindex; } if (_cobj + "" == end + "") { endindex = _index; endindex2 = _cindex; } }) } else { if (_obj + "" == start + "") { startindex = _index; } if (_obj + "" == end + "") { endindex = _index; } } }); var pointPath = []; if (startindex < endindex) { for (var i = startindex; i <= endindex; i++) { var pointnub = linedata[i]; if (pointnub instanceof Array) { pointPath.push(pointnub[0]); } else { pointPath.push(pointnub); } } } else if (startindex > endindex) { for (var i = startindex; i >= endindex; i--) { var pointnub = linedata[i]; if (pointnub instanceof Array) { pointPath.push(pointnub[0]); } else { pointPath.push(pointnub); } } } if (endindex2 > 0) { var pointnub = linedata[endindex]; for (var i = 1; i <= endindex2; i++) { pointPath.push(pointnub[i]); } } if (startindex2 != -1) { var startarray = []; var pointnub = linedata[startindex]; for (var i = startindex2; i >0; i--) { startarray.push(pointnub[i]); } pointPath = startarray.concat(pointPath); } var linePositionArray = ConfigData["f" + floor].Points; var lineObjs = {} $.each(linePositionArray, function (_index, _obj) { lineObjs[_obj.name] = _obj.position; }); var pathpoints = []; var positiony = WT3DObj.commonFunc.findObject("floor_" + floor).position.y ; $.each(pointPath, function (_index, _obj) { if (lineObjs["f" + floor + "d_" + _obj]) { pathpoints.push({ x: lineObjs["f" + floor + "d_" + _obj].x, y: positiony , z: lineObjs["f" + floor + "d_" + _obj].z, type: "nomal" }); } }); if (startOut) { $.each(linePositionArray, function (_index, _obj) { if (_obj.name == "f" + floor + "d_" + start + "_room") { pathpoints = [{ x: _obj.position.x, y: positiony, z: _obj.position.z, type: "nomal" }].concat(pathpoints); } }); } if (endIn) { if (end) { $.each(linePositionArray, function (_index, _obj) { if (_obj.name == "f" + floor + "d_" + end +"_room") { pathpoints.push({ x: _obj.position.x, y: positiony, z: _obj.position.z, type: "nomal" }) } }); } };
//创建节点模型 var modelsNames = modelBussiness.createRoadLine(pathpoints, new Date().getTime(), timeLong); CModelNames = CModelNames.concat(modelsNames); }
画线与移动具体实现如下:
ModelBussiness.prototype.Drawing = false; ModelBussiness.prototype.createRoadLine = function (points, index, timeLong) { if (modelBussiness.Drawing) { return; } modelBussiness.Drawing = true; var addModelNames = []; //points.push({ // x: _pobj[1], // y: 0, // z: _pobj[2], // type: "nomal" //});
//创建移动标签模型代码 var moveobj = { "name": "moveObj", "objType": "picIdentification", "size": { "x": 30, "y": 30 }, "position": { x: points[0].x, y: points[0].y+30, z: points[0].z }, "imgurl": "../img/3dImg/xhd.png", "showSortNub":1, "show": true, "customType1": "", "customType2": "", "animation": null, "dbclickEvents": null, "wx": null, "wy": null, "BindDevId": null, "BindDevName": null, "devInfo": null, "BindMeteId": null, "BindMeteName": null }; var models = []; var moveObjModel = WT3DObj.commonFunc.findObject("moveObj"); if (!moveObjModel) { models.push(moveobj); addModelNames.push("moveObj"); }
//创建线模型代码 var model = { "show": true, "uuid": "", "name": "splinecurve_7", "objType": "SplineCurve", "segments": 24, "points": [{ "x": 0, "y": 300, "z": 0 }, { "x": 100, "y": 250, "z": 100 }, { "x": 100, "y": 400, "z": 400 }], "style": { "skinColor": 0xDFFD6 }, "LineStyle": "LinePieces", "position": { "x": 0, "y":0, "z": 0 }, "scale": { "x": 1, "y": 1, "z": 1 }, "rotation": [{ "direction": "x", "degree": 0 }, { "direction": "y", "degree": 0 }, { "direction": "z", "degree": 0 }], "showSortNub": 1, "customType1": "", "customType2": "", "animation": null, "dbclickEvents": null, "BindDevId": null, "BindDevName": null, "devInfo": null, "BindMeteId": null, "BindMeteName": null } model.name = "Line" + index; addModelNames.push("Line" + index); model.segments = points.length - 1; var newpoints = []; var pointlength = [];//单段长度数组 var allLength = 0;//总长度 for (var i = 0; i < points.length; i++) { newpoints.push(points[0]); if (i < points.length - 1) { var length= Math.sqrt((points[i + 1].x - points[i].x) * (points[i + 1].x - points[i].x) + (points[i + 1].y - points[i].y) * (points[i + 1].y - points[i].y) + (points[i + 1].z - points[i].z) * (points[i + 1].z - points[i].z)) pointlength.push(length); allLength += length; } } model.points = newpoints; models.push(model); var modelnames = []; for (var i = 0; i < points.length - 1; i++) { if (points[i].x == points[i + 1].x && points[i].z == points[i + 1].z) { continue; } var position = { x: (points[i].x + points[i + 1].x) / 2, y: points[i].y, z: (points[i].z + points[i + 1].z) / 2 } var rotaiionz = this.getAngle(points[i].x, points[i].z, points[i + 1].x, points[i + 1].z) / 180 * Math.PI + Math.PI / 2; models.push({ "show": true, "uuid": "", "name": model.name + "_" + i, "objType": "Lathe", "position": position, "points": [{ "x": 0, "y": 0, "z": 0 }, { "x": 2, "y": 10, "z": 0 }], "style": { "skinColor": 1433087, "side": 2, "opacity": 1 }, "segments": 12, "radialSegments": 12, "closed": true, "phiStart": 0, "phiLength": 6.283185307179586, "showSortNub": 7, "customType1": "", "customType2": "", "animation": null, "dbclickEvents": null, "rotation": [{ "direction": "x", "degree": Math.PI / 2 }, { "direction": "y", "degree": 0 }, { "direction": "z", "degree": rotaiionz }], "radius": null, "scale": { "x": 1, "y": 1, "z": 1 }, "BindDevId": null, "BindDevName": null, "devInfo": null, "BindMeteId": null, "BindMeteName": null }); modelnames.push(model.name + "_" + i); addModelNames.push(model.name + "_" + i); }
//加载模型 WT3DObj.commonFunc.loadModelsByJsons(models, { x: 0, y: 0, z: 0 }, { x: 0, y: 0, z: 0 }, true, function () { if (!moveObjModel) { moveObjModel = WT3DObj.commonFunc.findObject("moveObj"); } var _obj = WT3DObj.commonFunc.findObject(model.name); var _objfores = WT3DObj.commonFunc.findObjectsByNames(modelnames); $.each(_objfores, function (_findex, _fobj) { _fobj.visible = false; }); if (!timeLong) { timeLong = 0; } var runTime = 0; for (var i = 0; i < points.length - 1; i++) { (function (_index) {//创建闭包
//获取小节点之间的运动时长
var stepTime = pointlength[_index] / allLength * timeLong;
setTimeout(function () {
//创建路径运动延迟等待
new Tn(_obj.geometry.vertices[_index+1]).to({ x: points[_index + 1].x, y: points[_index + 1].y, z: points[_index + 1].z, },
stepTime).onUpdate(function () { for (var j = _index+1; j < points.length; j++)
{ _obj.geometry.vertices[j].x = this.x; _obj.geometry.vertices[j].y = this.y;
_obj.geometry.vertices[j].z = this.z; }; moveObjModel.position.x = this.x;
moveObjModel.position.y = this.y+30; moveObjModel.position.z = this.z;
_obj.geometry.verticesNeedUpdate = true; }).start();
setTimeout(function () { $.each(_objfores,
function (_findex, _fobj) { if (_fobj.name == model.name + "_" + _index) { _fobj.visible = true; } }); }, stepTime / 2); }, runTime); runTime += stepTime+20; })(i); }
// WT3DObj.scene.children[305].geometry.vertices[22].z = 41400 //WT3DObj.scene.children[305].geometry.verticesNeedUpdate = true;
setTimeout(function () { modelBussiness.Drawing = false; }, timeLong) console.log("drawLine"); }); return addModelNames; }
由于篇幅原因,这一课先介绍到这里
后面我将继续讲解用webgl 建立 3D隧道、3D桥梁、webgl实现三维隧道桥梁、three.js实现三维隧道桥梁、桥梁隧道三维应用炫酷效果等等
技术交流 1203193731@qq.com
交流微信:
如果你有什么要交流的心得 可邮件我或者微我
其它相关文章:
如何用three.js(webgl)搭建3D粮仓、3D仓库、3D物联网设备监控-第十二课
如何用webgl(three.js)搭建处理3D隧道、3D桥梁、3D物联网设备、3D高速公路、三维隧道桥梁设备监控-第十一课
如何用three.js实现数字孪生、3D工厂、3D工业园区、智慧制造、智慧工业、智慧工厂-第十课
使用webgl(three.js)创建3D机房,3D机房微模块详细介绍(升级版二)
如何用webgl(three.js)搭建一个3D库房-第一课
如何用webgl(three.js)搭建一个3D库房,3D密集架,3D档案室,-第二课
使用webgl(three.js)搭建一个3D建筑,3D消防模拟——第三课
使用webgl(three.js)搭建一个3D智慧园区、3D建筑,3D消防模拟,web版3D,bim管理系统——第四课
如何用webgl(three.js)搭建不规则建筑模型,客流量热力图模拟
使用webgl(three.js)搭建一个3D智慧园区、3D建筑,3D消防模拟,web版3D,bim管理系统——第四课(炫酷版一)
使用webgl(three.js)搭建3D智慧园区、3D大屏,3D楼宇,智慧灯杆三维展示,3D灯杆,web版3D,bim管理系统——第六课
如何用webgl(three.js)搭建处理3D园区、3D楼层、3D机房管线问题(机房升级版)-第九课(一)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号